Potrebbero piacerti anche
- Design and Modification of Bench Vice by Increasing The Degrees of FreedomDocumento4 pagineDesign and Modification of Bench Vice by Increasing The Degrees of FreedomGRD JournalsNessuna valutazione finora
- Application of Chain Drive and Its Selection Method in AutomobileDocumento18 pagineApplication of Chain Drive and Its Selection Method in AutomobileSumedh sonawaneNessuna valutazione finora
- Lecture 8 Shaft DesignDocumento65 pagineLecture 8 Shaft DesignYasir A. Al-ShataifNessuna valutazione finora
- Steel ColumnDocumento33 pagineSteel Columnelect aksNessuna valutazione finora
- Chapter 1 Introduction To Engineering Principles and UnitsDocumento47 pagineChapter 1 Introduction To Engineering Principles and Unitseng_yap_1Nessuna valutazione finora
- Determination of Critical Speed of Whirling Shafts AimDocumento3 pagineDetermination of Critical Speed of Whirling Shafts AimLoka RakeshNessuna valutazione finora
- NewDocumento19 pagineNewretechNessuna valutazione finora
- Governor ProblemsDocumento3 pagineGovernor ProblemsPappuRamaSubramaniamNessuna valutazione finora
- Tensile Testing of Ferrous and Non-Ferrous AlloyDocumento7 pagineTensile Testing of Ferrous and Non-Ferrous Alloyrama100% (1)
- Problems On VibrationDocumento4 pagineProblems On VibrationDinesh BompadaNessuna valutazione finora
- Exp-9 Whrling of SpeedDocumento6 pagineExp-9 Whrling of SpeedAKSHAT TIWARI 17BME0300Nessuna valutazione finora
- Gear Design 2Documento15 pagineGear Design 2cracking khalifNessuna valutazione finora
- Torsion TestDocumento7 pagineTorsion Testilya danisyahNessuna valutazione finora
- Rajshahi University of Engineering and Technology, RajshahiDocumento9 pagineRajshahi University of Engineering and Technology, RajshahiShakil Ahmed100% (1)
- Beam Deflection ManualDocumento10 pagineBeam Deflection ManualwahtoiNessuna valutazione finora
- Engineering Mechanics Lab ManualDocumento25 pagineEngineering Mechanics Lab ManualShabbir AhmadNessuna valutazione finora
- KDM 6Documento54 pagineKDM 6KarthikeyanRamanujamNessuna valutazione finora
- Dynamic Pressure For Circular Silos Under Seismic ForceDocumento10 pagineDynamic Pressure For Circular Silos Under Seismic Forcesebastian9033Nessuna valutazione finora
- GATE Mechanical Engineering 1996Documento15 pagineGATE Mechanical Engineering 1996Gurunath EpiliNessuna valutazione finora
- Machine Design AssignmentDocumento9 pagineMachine Design AssignmentMuhammad Fahad Khan 51-FET/BSCMET/F19Nessuna valutazione finora
- Experiment No - 1: AIM: Study of Various Types of Gear Boxes Such As Industrial Gear Box, SynchromeshDocumento3 pagineExperiment No - 1: AIM: Study of Various Types of Gear Boxes Such As Industrial Gear Box, SynchromeshParas KumbalwarNessuna valutazione finora
- Unit-3.1.3-Gib and Cotter JointDocumento28 pagineUnit-3.1.3-Gib and Cotter JointAsvath GuruNessuna valutazione finora
- Deflection of Propped Cantilever BeamDocumento29 pagineDeflection of Propped Cantilever Beammkashif iqbal100% (1)
- Gear Box DesignDocumento74 pagineGear Box DesignRanjib BiswasNessuna valutazione finora
- JJ309 Fluid Mechanics Unit 5Documento21 pagineJJ309 Fluid Mechanics Unit 5Adib AzharNessuna valutazione finora
- Beam Analysis Using Singularity FunctionsDocumento16 pagineBeam Analysis Using Singularity FunctionsSire MkubwaNessuna valutazione finora
- Rolling Contact BearingDocumento31 pagineRolling Contact Bearingpotnuru JaivanthNessuna valutazione finora
- 9A03401 Kinematics of MachineryDocumento8 pagine9A03401 Kinematics of MachinerysivabharathamurthyNessuna valutazione finora
- Noise and Vibrations Question BankDocumento19 pagineNoise and Vibrations Question BankAbhijit DakareNessuna valutazione finora
- Whirling of ShaftDocumento5 pagineWhirling of ShaftGauthamSarang0% (1)
- Experiment No: Objective: ApparatusDocumento3 pagineExperiment No: Objective: ApparatusAfzaal FiazNessuna valutazione finora
- 12-3 Energy in SHM (P304Documento19 pagine12-3 Energy in SHM (P304tuikbe100% (1)
- Lab 5 - Vibration of A Cantilever BeamDocumento4 pagineLab 5 - Vibration of A Cantilever BeamChristian Giron100% (1)
- Relationship between angle of twist, torque, length and diameterDocumento6 pagineRelationship between angle of twist, torque, length and diameterAhsan MumtazNessuna valutazione finora
- Measuring Small Angles Using a Sine BarDocumento6 pagineMeasuring Small Angles Using a Sine BarMaria Mehar100% (2)
- ACD Lab Manual Spur Gear DesignDocumento4 pagineACD Lab Manual Spur Gear Designbalaguru780% (1)
- Unit-I Thin Plate Theory, Structural InstabilityDocumento78 pagineUnit-I Thin Plate Theory, Structural InstabilityNirav LakhaniNessuna valutazione finora
- Chapter 19-Bulk Deformation Processes IDocumento67 pagineChapter 19-Bulk Deformation Processes IMohsin AliNessuna valutazione finora
- Machine Fault Diagnostics MCQDocumento1 paginaMachine Fault Diagnostics MCQKali Kumar VardhineediNessuna valutazione finora
- Closed Coiled Helical Springs Subjected To Axial LoadsDocumento6 pagineClosed Coiled Helical Springs Subjected To Axial LoadsSnehasish Ishar100% (1)
- Moment of Inertia of a FlywheelDocumento5 pagineMoment of Inertia of a FlywheelRajaswi BeleNessuna valutazione finora
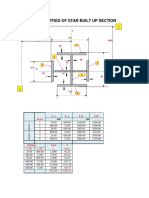
- Properties of Star Built Up Section: X-Dir y - Dir A KG/MDocumento3 pagineProperties of Star Built Up Section: X-Dir y - Dir A KG/Mdsananda100% (1)
- Mdid Lab ManualDocumento48 pagineMdid Lab Manualjaimin777Nessuna valutazione finora
- Bevel Gear Pair Transmission DesignDocumento12 pagineBevel Gear Pair Transmission Designrip111176Nessuna valutazione finora
- Material Handling Equipment Chapter on Hoisting EquipmentDocumento40 pagineMaterial Handling Equipment Chapter on Hoisting EquipmentSagni GetachewNessuna valutazione finora
- Shaft DesignDocumento4 pagineShaft DesignGurpinder Singh GillNessuna valutazione finora
- Design of a 2-Stage Helical-Bevel GearboxDocumento33 pagineDesign of a 2-Stage Helical-Bevel GearboxNikhil SatbhaiNessuna valutazione finora
- Design Gusset Plate JointsDocumento59 pagineDesign Gusset Plate JointsVaibhav SharmaNessuna valutazione finora
- Chapter 2 Lecturer - Belt DriveDocumento38 pagineChapter 2 Lecturer - Belt DriveNadz ReenNessuna valutazione finora
- Deflection of Curved BarsDocumento11 pagineDeflection of Curved Bars伟伦100% (1)
- Experiment # 15: LABORATORY MANUAL For ENGR2860U-Fluid MechanicsDocumento10 pagineExperiment # 15: LABORATORY MANUAL For ENGR2860U-Fluid MechanicsAbdullah Alshihri100% (1)
- Shaft Stress CalculationsDocumento2 pagineShaft Stress CalculationsVivek PrajapatiNessuna valutazione finora
- Beam Columns Example - Is 800Documento7 pagineBeam Columns Example - Is 800anil97232Nessuna valutazione finora
- L4 The Simple PendulumDocumento13 pagineL4 The Simple PendulumNur Syamiza ZamriNessuna valutazione finora
- MC Design 2Documento71 pagineMC Design 2Upayan Ghatak100% (1)
- Comparison of Capstan and Turret LathesDocumento1 paginaComparison of Capstan and Turret Lathessanjeevbijarnia01Nessuna valutazione finora
- 15A03302 Engineering MechanicsDocumento2 pagine15A03302 Engineering Mechanicstawheedmahalthy77Nessuna valutazione finora
- 05 BearingsDocumento11 pagine05 BearingsJasbir ChadhaNessuna valutazione finora
- 1411 1502 PDFDocumento60 pagine1411 1502 PDFAlejandro RagoNessuna valutazione finora
- Repair Stuck Grease Pumps EX2600-7Documento7 pagineRepair Stuck Grease Pumps EX2600-7TLK ChannelNessuna valutazione finora
- USBOOSTERS Booster Compressors 06-2017!46!37064Documento8 pagineUSBOOSTERS Booster Compressors 06-2017!46!37064fherlixNessuna valutazione finora
- Sinorix™: A6V10867394 - en - c2 Building Technologies 2017-06-06 Control Products and SystemsDocumento4 pagineSinorix™: A6V10867394 - en - c2 Building Technologies 2017-06-06 Control Products and SystemsEngineering TFINessuna valutazione finora
- Review Questions: 3. The Cyclist Has A Mass of 50 KG and Is Accelerating at 0.9 M/sDocumento8 pagineReview Questions: 3. The Cyclist Has A Mass of 50 KG and Is Accelerating at 0.9 M/sMohamedNessuna valutazione finora
- Caja Transferencia Jeep Grand Cherokee Laredo 1993 4.0LDocumento120 pagineCaja Transferencia Jeep Grand Cherokee Laredo 1993 4.0LGermán BustamanteNessuna valutazione finora
- Applied mechanics (CE 101T) - Simple machines overviewDocumento49 pagineApplied mechanics (CE 101T) - Simple machines overviewdarshanNessuna valutazione finora
- Mechanical, Physical and Wear Properties of PP-SCF CompositesDocumento11 pagineMechanical, Physical and Wear Properties of PP-SCF CompositesHarriJunaediNessuna valutazione finora
- MeasurIT Flexim Fastening Parts 0910Documento5 pagineMeasurIT Flexim Fastening Parts 0910cwiejkowskaNessuna valutazione finora
- Technical Description MPPUDocumento10 pagineTechnical Description MPPUNinaNessuna valutazione finora
- Gunsmithing and Tool Making Bible by Harold HoffmanDocumento294 pagineGunsmithing and Tool Making Bible by Harold HoffmanS Lucian Stefan100% (2)
- Treybal DistDocumento5 pagineTreybal DistJay CeeNessuna valutazione finora
- KSB Etabloc Jelleggorbe 50hzDocumento172 pagineKSB Etabloc Jelleggorbe 50hzUmar MajeedNessuna valutazione finora
- Manual Volvo XC90 2005Documento17 pagineManual Volvo XC90 2005Diego Alejandro QuinteroNessuna valutazione finora
- Product CatalogDocumento106 pagineProduct CatalogAri AzadNessuna valutazione finora
- Examples and Problem Questions On Speed Control of DC Motors, Controlled Rectifier DC Drives and Chopper Controlled PDFDocumento7 pagineExamples and Problem Questions On Speed Control of DC Motors, Controlled Rectifier DC Drives and Chopper Controlled PDFaswardi100% (1)
- Characteristics Series CE, CP, C: 2 Way Slip-In Cartridge ValvesDocumento17 pagineCharacteristics Series CE, CP, C: 2 Way Slip-In Cartridge Valvess_waqarNessuna valutazione finora
- Design and Analysis of Three Dimensional Structural Analysis of Airfoil To Various Composite MaterialsDocumento4 pagineDesign and Analysis of Three Dimensional Structural Analysis of Airfoil To Various Composite MaterialsSri Tech EngineeringNessuna valutazione finora
- Automatic TransmissionDocumento387 pagineAutomatic Transmissionadialfian2306Nessuna valutazione finora
- Gear BoxDocumento14 pagineGear Boxarackalfrancis0% (1)
- Buckling Analysis: The Theory of BucklingDocumento6 pagineBuckling Analysis: The Theory of BucklingKing Everest100% (2)
- LG4HKED-WE-VN53 - Engine Control System 4HK1Documento404 pagineLG4HKED-WE-VN53 - Engine Control System 4HK1tuannholtt100% (8)
- Hydraulic Accumulator (High Pressure) - Test and Charge: Pruebas y AjustesDocumento16 pagineHydraulic Accumulator (High Pressure) - Test and Charge: Pruebas y AjustesBrayan Sánchez ParedesNessuna valutazione finora
- Diaphragms Chords CollectorsDocumento219 pagineDiaphragms Chords CollectorsElio Saldaña100% (1)
- 032 Aeroplane Performance (JAA ATPL Theory)Documento429 pagine032 Aeroplane Performance (JAA ATPL Theory)dforceman0% (1)
- Design Report of Diesel Engine, Air Cooled (15Kw)Documento26 pagineDesign Report of Diesel Engine, Air Cooled (15Kw)Roshan ShajuNessuna valutazione finora
- Intelligent Air Duct Detectors: FeaturesDocumento3 pagineIntelligent Air Duct Detectors: FeaturesMarcelo FradeNessuna valutazione finora
- Thermodynamics 2 Module #2 Rankine CycleDocumento19 pagineThermodynamics 2 Module #2 Rankine CycleJohn Rexel CaroNessuna valutazione finora
- Greaves Power 100 Kva Silent Diesel GeneratorDocumento2 pagineGreaves Power 100 Kva Silent Diesel Generatorabhinav9274Nessuna valutazione finora
- 4-Sided Planer & Moulder Operation Manual: For Spares and Service ContactDocumento48 pagine4-Sided Planer & Moulder Operation Manual: For Spares and Service ContactAlfred TsuiNessuna valutazione finora