Potrebbero piacerti anche
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Black Box Software Testing: Introduction To Test DocumentationDocumento29 pagineBlack Box Software Testing: Introduction To Test DocumentationMohamed SaleemNessuna valutazione finora
- Emi 2018Documento72 pagineEmi 2018Pushpendra Pratap Singh0% (1)
- Instructors' Solutions For Mathematical Methods For Physics and Engineering by RileyDocumento512 pagineInstructors' Solutions For Mathematical Methods For Physics and Engineering by Rileyastrowiz8813% (8)
- DC AC: DC Junction Box Top Bmu EMSDocumento1 paginaDC AC: DC Junction Box Top Bmu EMSJorge Enrrique Gomez MedinaNessuna valutazione finora
- Elegant InteriorsDocumento38 pagineElegant Interiorsalka dsouzaNessuna valutazione finora
- Volvo (Dem) and Haldex: History, Function, Diagnosis and RepairsDocumento6 pagineVolvo (Dem) and Haldex: History, Function, Diagnosis and RepairsNecsaszNorbertNessuna valutazione finora
- Parts Catalog: This Catalog Gives The Numbers and Names of Parts On This MachineDocumento39 pagineParts Catalog: This Catalog Gives The Numbers and Names of Parts On This MachinePericoNessuna valutazione finora
- Medellin Castillo Zaragoza Siqueiros2019 - Article - DesignAndManufacturingStrategi PDFDocumento16 pagineMedellin Castillo Zaragoza Siqueiros2019 - Article - DesignAndManufacturingStrategi PDFajay d1212Nessuna valutazione finora
- JEE-Mains Score CardDocumento1 paginaJEE-Mains Score CardSrikanta MishraNessuna valutazione finora
- Fire Bird V ATMEGA2560 Hardware Manual 2010-03-26Documento131 pagineFire Bird V ATMEGA2560 Hardware Manual 2010-03-26Bedadipta Bain100% (1)
- 7) Progress PaymentDocumento5 pagine7) Progress Paymentkerwin jayNessuna valutazione finora
- Design of Queensland Road Infrastructure For High Risk EnvironmentsDocumento7 pagineDesign of Queensland Road Infrastructure For High Risk EnvironmentsAnonymous fS6Znc9Nessuna valutazione finora
- GeomembranesinDams (INACOLD)Documento38 pagineGeomembranesinDams (INACOLD)Robbi Shobri Rakhman100% (1)
- Barriere Levante IndustrielleDocumento2 pagineBarriere Levante IndustrielleAlekso GjakovskiNessuna valutazione finora
- C1107Documento4 pagineC1107Pankaj PaulNessuna valutazione finora
- Warranty Card PDFDocumento1 paginaWarranty Card PDFEy AhNessuna valutazione finora
- NPSHHHHDocumento5 pagineNPSHHHHMumtaz Ahmed Ghumman100% (1)
- Wings of Prey ManualDocumento20 pagineWings of Prey ManualRaphael DoukkaliNessuna valutazione finora
- Washer Dryer: Owner'S ManualDocumento29 pagineWasher Dryer: Owner'S ManualThai FuizaiNessuna valutazione finora
- Accounting Information Systems: Basic Concepts and Current Issues 4th Edition Robert L. HurtDocumento29 pagineAccounting Information Systems: Basic Concepts and Current Issues 4th Edition Robert L. HurtJamieNessuna valutazione finora
- IPECS-eMG80 Quick Start GuideDocumento11 pagineIPECS-eMG80 Quick Start GuideDjromeo EdyNessuna valutazione finora
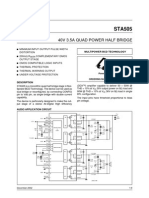
- STA505Documento10 pagineSTA505kizonzNessuna valutazione finora
- The VI Editor PDFDocumento7 pagineThe VI Editor PDFPurandhar TataraoNessuna valutazione finora
- Fundamentals of The Automotive Cabin Climate Control SystemDocumento6 pagineFundamentals of The Automotive Cabin Climate Control SystemSeddik MaarfiNessuna valutazione finora
- General Use SOP TemplateDocumento2 pagineGeneral Use SOP TemplateBaba HansNessuna valutazione finora
- Construction Schedule Template 05Documento7 pagineConstruction Schedule Template 05bharat gadaraNessuna valutazione finora
- Casting DefectsDocumento22 pagineCasting DefectsDeepakKaushik100% (1)
- Scheduled Power Interruption For April 23-24, 2019Documento1 paginaScheduled Power Interruption For April 23-24, 2019glaiNessuna valutazione finora
- Basic Yagi Antenna Design For The ExperimenterDocumento9 pagineBasic Yagi Antenna Design For The ExperimenterKrista JacksonNessuna valutazione finora
- NEBB TAB Technician ProgramDocumento2 pagineNEBB TAB Technician Programmoelsaied569Nessuna valutazione finora