Potrebbero piacerti anche
- Program ConveyorDocumento112 pagineProgram ConveyorDicky EkaNessuna valutazione finora
- U 3EV53600 MainRoutineDocumento16 pagineU 3EV53600 MainRoutineBabbooNessuna valutazione finora
- RouteDocumento4 pagineRoutenguyentrankhang2000Nessuna valutazione finora
- Sh1 To Mt1 Empty BinDocumento6 pagineSh1 To Mt1 Empty BinBoddapalli sureshNessuna valutazione finora
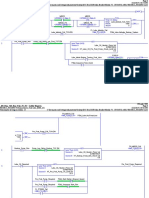
- RSLogix 5000 Report(s) 120511Documento74 pagineRSLogix 5000 Report(s) 120511Renji JacobNessuna valutazione finora
- Generator Protection - Lect. 4 - 2019-2020Documento24 pagineGenerator Protection - Lect. 4 - 2019-2020EslamNessuna valutazione finora
- ELITE-213-01-103-BCU PanelDocumento45 pagineELITE-213-01-103-BCU PanelAneesh SharmaNessuna valutazione finora
- MOI - Riyadh-UL Control Panel (1 Duty + 1 Standby) - 4KWDocumento14 pagineMOI - Riyadh-UL Control Panel (1 Duty + 1 Standby) - 4KWEmad AbushrarNessuna valutazione finora
- Tunel Linde Cryoline CWDocumento74 pagineTunel Linde Cryoline CWdddscri100% (1)
- LF Plant STG S.p.A. Main Control PanelDocumento98 pagineLF Plant STG S.p.A. Main Control Panelharetha all nassanNessuna valutazione finora
- Pok Shelling - 2021 - 11082021Documento139 paginePok Shelling - 2021 - 11082021Jose Manuel Cortez MayorgaNessuna valutazione finora
- VD-0301-ZML-DWG-0031-REV-002A - Inst Elec Comment - J Norbert PDFDocumento729 pagineVD-0301-ZML-DWG-0031-REV-002A - Inst Elec Comment - J Norbert PDFshrikanth5singhNessuna valutazione finora
- Scaling ProgramDocumento6 pagineScaling ProgramElmer RemleNessuna valutazione finora
- n59 Srep1 Ach Arc Rev ADocumento1 paginan59 Srep1 Ach Arc Rev AedemmikeNessuna valutazione finora
- Nhà Máy Điện Gió 220Kv Amaccao Quảng Trị 1: A Chau Industrial Technology Joint Stock CompanyDocumento31 pagineNhà Máy Điện Gió 220Kv Amaccao Quảng Trị 1: A Chau Industrial Technology Joint Stock CompanyNguyen HuongNessuna valutazione finora
- Allen Bradley NEMA PDFDocumento214 pagineAllen Bradley NEMA PDFtajamul husainNessuna valutazione finora
- Iasimp Qr001a en PDocumento10 pagineIasimp Qr001a en PangelochicomaNessuna valutazione finora
- 132kV-TWIN LINE-CP SCHEME & TB LIST - E01+W1Documento48 pagine132kV-TWIN LINE-CP SCHEME & TB LIST - E01+W1Melkin NPNessuna valutazione finora
- Logix HMI PasswordDocumento1 paginaLogix HMI PasswordMarcelo C. OliveiraNessuna valutazione finora
- F+CTJB: 3 5 6 2 0 0 6 1 3 6 8 File Name:-Ytpsd1Documento4 pagineF+CTJB: 3 5 6 2 0 0 6 1 3 6 8 File Name:-Ytpsd1Appalaraju RokallaNessuna valutazione finora
- E2308 304b Ga of PLC Panel r0Documento3 pagineE2308 304b Ga of PLC Panel r0sujitNessuna valutazione finora
- Use of OscilloscopeDocumento13 pagineUse of Oscilloscopesonja_ŽarićNessuna valutazione finora
- 32 Mva Power Expansion Pt. Bekaert: B For Approval FADocumento15 pagine32 Mva Power Expansion Pt. Bekaert: B For Approval FAaditya agasiNessuna valutazione finora
- 1763 Um001 - en PDocumento115 pagine1763 Um001 - en Pnuunees100% (1)
- Electrico PDFDocumento60 pagineElectrico PDFJoel SimpsonNessuna valutazione finora
- Visio-C System Overview JEC PAS V2-0Documento5 pagineVisio-C System Overview JEC PAS V2-0باسم العوفيNessuna valutazione finora
- Dcs Io List - S.m.s.n.nagawade SSKDocumento12 pagineDcs Io List - S.m.s.n.nagawade SSKKalpesh YadavNessuna valutazione finora
- Users Guide - 4 - 1Documento126 pagineUsers Guide - 4 - 1punwireNessuna valutazione finora
- Escalera 495BIDocumento131 pagineEscalera 495BIJesus ValenzuelaNessuna valutazione finora
- S2628217000002 ESN1 enDocumento500 pagineS2628217000002 ESN1 enataraxia57Nessuna valutazione finora
- Iom - 1-250Documento250 pagineIom - 1-250Eduardo JoseNessuna valutazione finora
- Program PLC Documentation PDFDocumento201 pagineProgram PLC Documentation PDFtoko man0% (1)
- Iasimp qr009 en P PDFDocumento10 pagineIasimp qr009 en P PDFToni PrattNessuna valutazione finora
- Instrument Symbols - Cont Instrumentation Call-Out Controllogix/Wonderware Tag Schema Tag SchemaDocumento56 pagineInstrument Symbols - Cont Instrumentation Call-Out Controllogix/Wonderware Tag Schema Tag SchemaSean SantanderNessuna valutazione finora
- AHS-KRS-30-BUB - DC-UPS2 - 00E652A3 - RedCorrex PDFDocumento24 pagineAHS-KRS-30-BUB - DC-UPS2 - 00E652A3 - RedCorrex PDFArchiford NdhlovuNessuna valutazione finora
- US103225 Panel LogicDocumento204 pagineUS103225 Panel LogicBop AlberthaNessuna valutazione finora
- 0069 - DTCB - O&M ManualDocumento115 pagine0069 - DTCB - O&M ManualkwakerNessuna valutazione finora
- Signal Flow Diagram: Electronics Division, Bangalore - 26Documento65 pagineSignal Flow Diagram: Electronics Division, Bangalore - 26Deepak GuptaNessuna valutazione finora
- Restoration of Power After Power Black Out Due Shut Down of CPP 540 Incoming Line To 220 KV Switchyard On 22.04.12Documento33 pagineRestoration of Power After Power Black Out Due Shut Down of CPP 540 Incoming Line To 220 KV Switchyard On 22.04.12thehinduNessuna valutazione finora
- TSF12 09 02 Hail 1150 P10 2Documento9 pagineTSF12 09 02 Hail 1150 P10 2Arif MohammedNessuna valutazione finora
- Hand-Held Terminal: (Catalog Number 1747-PT1)Documento465 pagineHand-Held Terminal: (Catalog Number 1747-PT1)Daniel LaraNessuna valutazione finora
- Technical Bid T - 3560: (Note: Photo Copy of SSI / NSIC Certificate Is Not Acceptable)Documento12 pagineTechnical Bid T - 3560: (Note: Photo Copy of SSI / NSIC Certificate Is Not Acceptable)SeresdfrtNessuna valutazione finora
- IMCC Check ListDocumento9 pagineIMCC Check ListZulfequar R. Ali KhanNessuna valutazione finora
- RSLogix 5000 Report(s) PDFDocumento216 pagineRSLogix 5000 Report(s) PDFthigale empireNessuna valutazione finora
- VF006-IN-ILD-0002 - Instrument Loop Drawing - Rev.0Documento197 pagineVF006-IN-ILD-0002 - Instrument Loop Drawing - Rev.0Phạm Tấn PhướcNessuna valutazione finora
- PT. PLN (Persero) : Schematic Diagram of ZDT Line Differential Relay GD AquaticDocumento23 paginePT. PLN (Persero) : Schematic Diagram of ZDT Line Differential Relay GD AquaticendriyaNessuna valutazione finora
- Iso Es CB InterlocksDocumento78 pagineIso Es CB InterlocksravibabumarpallyNessuna valutazione finora
- 1500 Revision ManagementDocumento18 pagine1500 Revision Managementbuturca sorinNessuna valutazione finora
- Drives Important PDFDocumento177 pagineDrives Important PDFIgidio PedroNessuna valutazione finora
- PLC Planner: Your Uniqueness Is Your WorthnessDocumento72 paginePLC Planner: Your Uniqueness Is Your WorthnessAshu SharmaNessuna valutazione finora
- VFXL69-250-54CE (Rev.3 - 25.08.16) PDFDocumento26 pagineVFXL69-250-54CE (Rev.3 - 25.08.16) PDFlquinter75Nessuna valutazione finora
- TJ01 NN VD LG010SG20001 Is1 PDFDocumento6 pagineTJ01 NN VD LG010SG20001 Is1 PDFNiño DioknoNessuna valutazione finora
- System Configuration and HMI ConfigurationDocumento6 pagineSystem Configuration and HMI ConfigurationKiên NguyễnNessuna valutazione finora
- B201 BCU 6MD662 PRNDocumento84 pagineB201 BCU 6MD662 PRNsherubdNessuna valutazione finora
- Technical Description of The Digital Turbine GovernorDocumento20 pagineTechnical Description of The Digital Turbine GovernorLe Hoang HaoNessuna valutazione finora
- 305.534 - Electrical Drawing SteinemanDocumento337 pagine305.534 - Electrical Drawing SteinemanGerardo PerezNessuna valutazione finora
- Electrical Drawing A4 100225 V2011-06-17Documento162 pagineElectrical Drawing A4 100225 V2011-06-17maherianto 29Nessuna valutazione finora
- 2.2 Schematic PLC RIO Panel 2Documento30 pagine2.2 Schematic PLC RIO Panel 2koushik42000Nessuna valutazione finora
- An13X Series An23X Series: Anadigmapex Dpasp Family User ManualDocumento36 pagineAn13X Series An23X Series: Anadigmapex Dpasp Family User ManualspotNessuna valutazione finora
- Sluaa 46Documento11 pagineSluaa 46ANessuna valutazione finora
- Wireless and Mobile All-IP Networks: Authors: Yi-Bing Lin and Ai-Chun Pang Publisher: Wiley ISBN: 0-471-74922-2Documento6 pagineWireless and Mobile All-IP Networks: Authors: Yi-Bing Lin and Ai-Chun Pang Publisher: Wiley ISBN: 0-471-74922-2vphuc1984Nessuna valutazione finora
- Shital+K+Dhamal Updated+Documento8 pagineShital+K+Dhamal Updated+atulyash1Nessuna valutazione finora
- 2D Barcode Scanner User's ManualDocumento31 pagine2D Barcode Scanner User's Manualpedanser1971Nessuna valutazione finora
- UE20CS302 Unit4 SlidesDocumento312 pagineUE20CS302 Unit4 SlidesDRUVA HegdeNessuna valutazione finora
- Asset Requirements Planning (ARP) : Extending ERP's Reach To TheDocumento1 paginaAsset Requirements Planning (ARP) : Extending ERP's Reach To TheworldtelemetryNessuna valutazione finora
- Cisco Nexus 1000V DatasheetDocumento12 pagineCisco Nexus 1000V Datasheetofficial1000vNessuna valutazione finora
- Tilt Switch OldDocumento2 pagineTilt Switch OldAngel Francisco NavarroNessuna valutazione finora
- Modeling Transition State in GaussianDocumento5 pagineModeling Transition State in GaussianBruno Moraes ServilhaNessuna valutazione finora
- Test QuestionsDocumento11 pagineTest QuestionsAbastar Kycie BebNessuna valutazione finora
- R8052D Mvap22Documento20 pagineR8052D Mvap22Rinda_RaynaNessuna valutazione finora
- Scale 1: 7: Interface Arms Are Set at The Lowest Point Height Adjustment Range:+15mmDocumento1 paginaScale 1: 7: Interface Arms Are Set at The Lowest Point Height Adjustment Range:+15mmtk quyetNessuna valutazione finora
- RHEL 7 Hardening Script V2Documento25 pagineRHEL 7 Hardening Script V2s_mullickNessuna valutazione finora
- Release NotesDocumento405 pagineRelease NotesAbhishek VermaNessuna valutazione finora
- Pipeline EngineerDocumento2 paginePipeline Engineer25031968Nessuna valutazione finora
- Digital Marketing 2Documento52 pagineDigital Marketing 2Nayana MurtyNessuna valutazione finora
- AIS-Revenue CycleDocumento67 pagineAIS-Revenue CycleJames Barzo100% (2)
- ITSC Seminar - 27001 27002 Update Philip SyDocumento30 pagineITSC Seminar - 27001 27002 Update Philip SySyed ZiaNessuna valutazione finora
- 03.bobak Group IB Portfolio UpdateDocumento32 pagine03.bobak Group IB Portfolio Updateericstevens77777Nessuna valutazione finora
- Preps 5-0 Pro UserGuide enDocumento372 paginePreps 5-0 Pro UserGuide enapi-3832072100% (2)
- Lifecycle Expectations - Software Project ManagementDocumento2 pagineLifecycle Expectations - Software Project ManagementRiyaz Shaik100% (1)
- PRACTITIONER custom-CCP-Rev4.1-AM-ForSend PDFDocumento154 paginePRACTITIONER custom-CCP-Rev4.1-AM-ForSend PDFKath CaillahuaNessuna valutazione finora
- Asmtiu 23Documento356 pagineAsmtiu 23Gokul KrishnamoorthyNessuna valutazione finora
- MaintenanceDocumento311 pagineMaintenanceZubair NazirNessuna valutazione finora
- CH 07Documento12 pagineCH 07Imam AwaluddinNessuna valutazione finora
- EPM240 DatasheetDocumento102 pagineEPM240 DatasheetLong VũNessuna valutazione finora
- OpenQuake Manual 3.6Documento193 pagineOpenQuake Manual 3.6anon_897435228Nessuna valutazione finora
- Madanapalle Institute of Technology & Science: Madanapalle (Ugc-Autonomous) WWW - Mits.ac - inDocumento41 pagineMadanapalle Institute of Technology & Science: Madanapalle (Ugc-Autonomous) WWW - Mits.ac - inShanmuga KumarNessuna valutazione finora
- LogDocumento223 pagineLogKejar TayangNessuna valutazione finora
- Littelfuse ProtectionRelays SE MON330 Software ManualDocumento36 pagineLittelfuse ProtectionRelays SE MON330 Software ManualPPLePewNessuna valutazione finora
- Karmachari An Nirdesika 2066 FinalDocumento35 pagineKarmachari An Nirdesika 2066 FinalKaushal DahalNessuna valutazione finora
- The Internet Con: How to Seize the Means of ComputationDa EverandThe Internet Con: How to Seize the Means of ComputationValutazione: 5 su 5 stelle5/5 (6)
- Evaluation of Some SMS Verification Services and Virtual Credit Cards Services for Online Accounts VerificationsDa EverandEvaluation of Some SMS Verification Services and Virtual Credit Cards Services for Online Accounts VerificationsValutazione: 5 su 5 stelle5/5 (2)
- How to Create Cpn Numbers the Right way: A Step by Step Guide to Creating cpn Numbers LegallyDa EverandHow to Create Cpn Numbers the Right way: A Step by Step Guide to Creating cpn Numbers LegallyValutazione: 4 su 5 stelle4/5 (27)
- How to Do Nothing: Resisting the Attention EconomyDa EverandHow to Do Nothing: Resisting the Attention EconomyValutazione: 4 su 5 stelle4/5 (421)
- Laws of UX: Using Psychology to Design Better Products & ServicesDa EverandLaws of UX: Using Psychology to Design Better Products & ServicesValutazione: 5 su 5 stelle5/5 (9)
- Branding: What You Need to Know About Building a Personal Brand and Growing Your Small Business Using Social Media Marketing and Offline Guerrilla TacticsDa EverandBranding: What You Need to Know About Building a Personal Brand and Growing Your Small Business Using Social Media Marketing and Offline Guerrilla TacticsValutazione: 5 su 5 stelle5/5 (32)
- To Pixar and Beyond: My Unlikely Journey with Steve Jobs to Make Entertainment HistoryDa EverandTo Pixar and Beyond: My Unlikely Journey with Steve Jobs to Make Entertainment HistoryValutazione: 4.5 su 5 stelle4.5/5 (260)
- Ten Arguments for Deleting Your Social Media Accounts Right NowDa EverandTen Arguments for Deleting Your Social Media Accounts Right NowValutazione: 4 su 5 stelle4/5 (388)
- The Art of Social Media: Power Tips for Power UsersDa EverandThe Art of Social Media: Power Tips for Power UsersValutazione: 4 su 5 stelle4/5 (59)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersDa Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersValutazione: 5 su 5 stelle5/5 (1)
- The YouTube Formula: How Anyone Can Unlock the Algorithm to Drive Views, Build an Audience, and Grow RevenueDa EverandThe YouTube Formula: How Anyone Can Unlock the Algorithm to Drive Views, Build an Audience, and Grow RevenueValutazione: 5 su 5 stelle5/5 (33)
- Blender 3D Basics Beginner's Guide Second EditionDa EverandBlender 3D Basics Beginner's Guide Second EditionValutazione: 5 su 5 stelle5/5 (1)
- YouTube Growth Mastery: How to Start & Grow A Successful Youtube Channel. Get More Views, Subscribers, Hack The Algorithm, Make Money & Master YouTubeDa EverandYouTube Growth Mastery: How to Start & Grow A Successful Youtube Channel. Get More Views, Subscribers, Hack The Algorithm, Make Money & Master YouTubeValutazione: 3 su 5 stelle3/5 (3)
- App Innovator's Guide: Mobile App Development for Android and iOS: Building Cross-Platform SolutionsDa EverandApp Innovator's Guide: Mobile App Development for Android and iOS: Building Cross-Platform SolutionsNessuna valutazione finora
- Wordpress 2023 A Beginners Guide : Design Your Own Website With WordPress 2023Da EverandWordpress 2023 A Beginners Guide : Design Your Own Website With WordPress 2023Nessuna valutazione finora
- Social Media Marketing 2024, 2025: Build Your Business, Skyrocket in Passive Income, Stop Working a 9-5 Lifestyle, True Online Working from HomeDa EverandSocial Media Marketing 2024, 2025: Build Your Business, Skyrocket in Passive Income, Stop Working a 9-5 Lifestyle, True Online Working from HomeNessuna valutazione finora
- Making Money By Selling 3D Models OnlineDa EverandMaking Money By Selling 3D Models OnlineValutazione: 4.5 su 5 stelle4.5/5 (2)
- ChatGPT Super Edition : Build Your Own Chatbot Without Cut-offsDa EverandChatGPT Super Edition : Build Your Own Chatbot Without Cut-offsValutazione: 5 su 5 stelle5/5 (2)
- The Ultimate LinkedIn Sales Guide: How to Use Digital and Social Selling to Turn LinkedIn into a Lead, Sales and Revenue Generating MachineDa EverandThe Ultimate LinkedIn Sales Guide: How to Use Digital and Social Selling to Turn LinkedIn into a Lead, Sales and Revenue Generating MachineNessuna valutazione finora
- Computer Science: A Concise IntroductionDa EverandComputer Science: A Concise IntroductionValutazione: 4.5 su 5 stelle4.5/5 (14)
- Blender 3D for Jobseekers: Learn professional 3D creation skills using Blender 3D (English Edition)Da EverandBlender 3D for Jobseekers: Learn professional 3D creation skills using Blender 3D (English Edition)Nessuna valutazione finora
- TikTok Algorithms 2024 $15,000/Month Guide To Escape Your Job And Build an Successful Social Media Marketing Business From Home Using Your Personal Account, Branding, SEO, InfluencerDa EverandTikTok Algorithms 2024 $15,000/Month Guide To Escape Your Job And Build an Successful Social Media Marketing Business From Home Using Your Personal Account, Branding, SEO, InfluencerValutazione: 4 su 5 stelle4/5 (4)
- Ultimate Guide to YouTube for BusinessDa EverandUltimate Guide to YouTube for BusinessValutazione: 5 su 5 stelle5/5 (1)