Potrebbero piacerti anche
- Applications: Cutting Edge Solutions For FoodDocumento2 pagineApplications: Cutting Edge Solutions For FoodAGUAVIVANJNessuna valutazione finora
- United States Patent: (75) Inventor: Bart Gerard Boucherie, Izegem (BE)Documento7 pagineUnited States Patent: (75) Inventor: Bart Gerard Boucherie, Izegem (BE)AGUAVIVANJNessuna valutazione finora
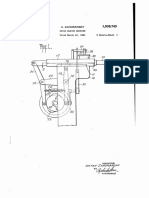
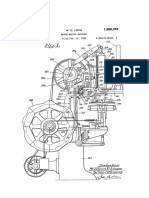
- A. Zahoransky 1,936,743: Filed March 2, 1931 2. Sheets-Sheet .Documento4 pagineA. Zahoransky 1,936,743: Filed March 2, 1931 2. Sheets-Sheet .AGUAVIVANJNessuna valutazione finora
- Nov. 22, 1932. W. D. Lpps. 1888,353Documento12 pagineNov. 22, 1932. W. D. Lpps. 1888,353AGUAVIVANJNessuna valutazione finora
- United States Patent: (75) Inventor: Bart Gerard Boucherie, Izegem (BE)Documento7 pagineUnited States Patent: (75) Inventor: Bart Gerard Boucherie, Izegem (BE)AGUAVIVANJNessuna valutazione finora
- Assus - Sa-E-: Be LiaDocumento16 pagineAssus - Sa-E-: Be LiaAGUAVIVANJNessuna valutazione finora
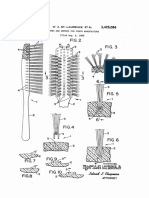
- Ley Aeland A Ghapman,: Fig. FIG. 2Documento3 pagineLey Aeland A Ghapman,: Fig. FIG. 2AGUAVIVANJNessuna valutazione finora
- Jan. 19, 1971 J, R. Gardner Etal 3,556,602: Filed March 5, 1969 2. Sheets-SheetDocumento5 pagineJan. 19, 1971 J, R. Gardner Etal 3,556,602: Filed March 5, 1969 2. Sheets-SheetAGUAVIVANJNessuna valutazione finora
- United States Patent (10) Patent No.: US 7,594,704 B2Documento8 pagineUnited States Patent (10) Patent No.: US 7,594,704 B2AGUAVIVANJNessuna valutazione finora
- United States Patent: (75) Inventor: Bart Gerard Boucherie, Izegem (BE)Documento7 pagineUnited States Patent: (75) Inventor: Bart Gerard Boucherie, Izegem (BE)AGUAVIVANJNessuna valutazione finora
- United States Patent: SchofieldDocumento14 pagineUnited States Patent: SchofieldAGUAVIVANJNessuna valutazione finora
- Filed Feb. 19, 1925 6 Sheets-Sheet 1: C, JobstDocumento14 pagineFiled Feb. 19, 1925 6 Sheets-Sheet 1: C, JobstAGUAVIVANJNessuna valutazione finora
- GB 1590759 ADocumento12 pagineGB 1590759 AAGUAVIVANJNessuna valutazione finora
- European Patent Application A46D 3/06Documento21 pagineEuropean Patent Application A46D 3/06AGUAVIVANJNessuna valutazione finora
- QU-BD OneUp and TwoUp Assembly InstructionsDocumento67 pagineQU-BD OneUp and TwoUp Assembly InstructionsNeilNessuna valutazione finora
- European Patent Application A46D 3/06Documento21 pagineEuropean Patent Application A46D 3/06AGUAVIVANJNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- How To Make A Very Simple Savonius Wind Turbine: InstructablesDocumento15 pagineHow To Make A Very Simple Savonius Wind Turbine: InstructablesZyviec75Nessuna valutazione finora
- Curriculam Vitae: Dijin RDocumento4 pagineCurriculam Vitae: Dijin RrichashyampatilNessuna valutazione finora
- Manufacturing SystemsDocumento28 pagineManufacturing SystemsLokesh SaxenaNessuna valutazione finora
- Tilting Pad Journal Bearing Starvation EffectsDocumento10 pagineTilting Pad Journal Bearing Starvation EffectsFarzadNessuna valutazione finora
- Plant Engineering-June 2017Documento100 paginePlant Engineering-June 2017Mariver LlorenteNessuna valutazione finora
- Finalized Report Lab 1Documento23 pagineFinalized Report Lab 1hanifNessuna valutazione finora
- Space RoboticsDocumento9 pagineSpace RoboticsRushikesh WareNessuna valutazione finora
- BiG Pack 1290 HDP II XC Ops ManualDocumento585 pagineBiG Pack 1290 HDP II XC Ops ManualЄвген ЗаліщукNessuna valutazione finora
- NPI Job Responsibilities Detailed Jobs - Print 28-07-2021 - QADocumento441 pagineNPI Job Responsibilities Detailed Jobs - Print 28-07-2021 - QAPirasanth VithuNessuna valutazione finora
- CENT Condition Monitoring ServiceDocumento2 pagineCENT Condition Monitoring ServicesupljinaNessuna valutazione finora
- STP780 Eb.1415051 1 PDFDocumento191 pagineSTP780 Eb.1415051 1 PDFhayderlin navaNessuna valutazione finora
- Engineering OrientationDocumento5 pagineEngineering Orientations. dela cruz, BLJDONessuna valutazione finora
- Mechanical Reasoning Study Guide ForDocumento2 pagineMechanical Reasoning Study Guide ForTaylor AkersNessuna valutazione finora
- HiTech Products Manufactures Three Types of RemoteDocumento6 pagineHiTech Products Manufactures Three Types of RemoteAlexis Kaye DayagNessuna valutazione finora
- Adash A4400 VA4 Pro II Data Sheet Vibraciones ProgramaDocumento6 pagineAdash A4400 VA4 Pro II Data Sheet Vibraciones ProgramaIgnacio Alfredo Espinoza GonzalezNessuna valutazione finora
- ABB - eVD4 Installation and Service Instructions PDFDocumento72 pagineABB - eVD4 Installation and Service Instructions PDFEmina Isic ZovkicNessuna valutazione finora
- Extracto ISO 10816Documento10 pagineExtracto ISO 10816clroyo9475Nessuna valutazione finora
- C-09 April, May-2012Documento26 pagineC-09 April, May-2012John SandaNessuna valutazione finora
- Handwheels, Limit Stops and Lever Operators: Sizing & SelectionDocumento8 pagineHandwheels, Limit Stops and Lever Operators: Sizing & SelectionsnamprogNessuna valutazione finora
- Groundnut Sheller Machine PDFDocumento8 pagineGroundnut Sheller Machine PDFTanvi Khurana100% (5)
- SyllabusDocumento94 pagineSyllabusms2sl4Nessuna valutazione finora
- Slip RingsDocumento12 pagineSlip RingsJong JavaNessuna valutazione finora
- 8LV OpsDocumento88 pagine8LV OpsAlbertoNessuna valutazione finora
- Komatsu Hydraulic Excavator Pc27mr 35mr 2 Operation Maintenance ManualDocumento20 pagineKomatsu Hydraulic Excavator Pc27mr 35mr 2 Operation Maintenance Manualjacob100% (40)
- Robotics (ME 21396) : 1st Semester M Tech (CC)Documento37 pagineRobotics (ME 21396) : 1st Semester M Tech (CC)Mahima SinghNessuna valutazione finora
- Lectro-Echanical Nergy Onversion (EMEC) : E M E CDocumento14 pagineLectro-Echanical Nergy Onversion (EMEC) : E M E CATCNessuna valutazione finora
- Rotary Drilling Rig ComponentsDocumento130 pagineRotary Drilling Rig Componentsgarry_dirak100% (21)
- 3 Mast: Technical Manual Publ. No. 6193.008 1225Documento28 pagine3 Mast: Technical Manual Publ. No. 6193.008 1225----Nessuna valutazione finora
- Me3403-Robotics and Machine Vision SystemDocumento19 pagineMe3403-Robotics and Machine Vision SystemSengottaiyan MalaisamyNessuna valutazione finora
- Flex TDocumento64 pagineFlex TJose LandaetaNessuna valutazione finora