Potrebbero piacerti anche
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- TRB CatalogDocumento836 pagineTRB CatalogDiana LazariNessuna valutazione finora
- 2pages 6Documento3 pagine2pages 6Rachana G Y Rachana G YNessuna valutazione finora
- Design BasisDocumento9 pagineDesign BasisSamiksha RajdevNessuna valutazione finora
- Specification of SGP InterlayerDocumento3 pagineSpecification of SGP InterlayerHAN HANNessuna valutazione finora
- B.tech - Non Credit Courses For 2nd Year StudentsDocumento4 pagineB.tech - Non Credit Courses For 2nd Year StudentsNishant MishraNessuna valutazione finora
- Mixed Methods Research PDFDocumento14 pagineMixed Methods Research PDFChin Ing KhangNessuna valutazione finora
- Kina23744ens 002-Seisracks1Documento147 pagineKina23744ens 002-Seisracks1Adrian_Condrea_4281Nessuna valutazione finora
- Agents SocializationDocumento4 pagineAgents Socializationinstinct920% (1)
- A Science Lesson Plan Analysis Instrument For Formative and Summative Program Evaluation of A Teacher Education ProgramDocumento31 pagineA Science Lesson Plan Analysis Instrument For Formative and Summative Program Evaluation of A Teacher Education ProgramTiara Kurnia KhoerunnisaNessuna valutazione finora
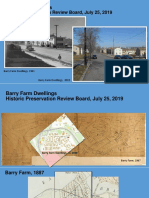
- Barry Farm Powerpoint SlidesDocumento33 pagineBarry Farm Powerpoint SlidessarahNessuna valutazione finora
- IBRO News 2004Documento8 pagineIBRO News 2004International Brain Research Organization100% (1)
- What Are The Subjects Which Come in UPSC Engineering Services - Electronics - Communication - ExamDocumento2 pagineWhat Are The Subjects Which Come in UPSC Engineering Services - Electronics - Communication - ExamVikas ChandraNessuna valutazione finora
- Shape The Future Listening Practice - Unit 3 - Without AnswersDocumento1 paginaShape The Future Listening Practice - Unit 3 - Without Answersleireleire20070701Nessuna valutazione finora
- Collaborative Planning Template W CaptionDocumento5 pagineCollaborative Planning Template W Captionapi-297728751Nessuna valutazione finora
- Complaint For Declaratory and Injunctive Relief FINALDocumento40 pagineComplaint For Declaratory and Injunctive Relief FINALGilbert CordovaNessuna valutazione finora
- DSSSSPDocumento3 pagineDSSSSPChris BalmacedaNessuna valutazione finora
- Numerical Methods - Fixed Point IterationDocumento4 pagineNumerical Methods - Fixed Point IterationMizanur RahmanNessuna valutazione finora
- Leadership Competencies Paper 2Documento5 pagineLeadership Competencies Paper 2api-297379255Nessuna valutazione finora
- Artificial Intelligence Is Branch of Computer Science Dealing With The Simulation of Intelligent Behavior in ComputersDocumento2 pagineArtificial Intelligence Is Branch of Computer Science Dealing With The Simulation of Intelligent Behavior in ComputersMuhammad Zaheer AnwarNessuna valutazione finora
- WV6 QuestionnaireDocumento21 pagineWV6 QuestionnaireBea MarquezNessuna valutazione finora
- #Stopableism: Reduksi Stigma Kepada Penyandang Disabilitas Melalui Intervensi Bias ImplisitDocumento15 pagine#Stopableism: Reduksi Stigma Kepada Penyandang Disabilitas Melalui Intervensi Bias ImplisitDennis SuhardiniNessuna valutazione finora
- Philosophy 101Documento8 paginePhilosophy 101scribd5846Nessuna valutazione finora
- Partnerships Program For Education and Training (PAEC)Documento6 paginePartnerships Program For Education and Training (PAEC)LeslieNessuna valutazione finora
- DBR G+24 Building ProjectDocumento28 pagineDBR G+24 Building ProjectShobhit Mohta100% (1)
- Ieee Sight 2018 Call For PapersDocumento4 pagineIeee Sight 2018 Call For PapersThushar TomNessuna valutazione finora
- Henderson 1Documento4 pagineHenderson 1danielNessuna valutazione finora
- Organizational Behavior - Motivational Theories at Mcdonald's ReportDocumento11 pagineOrganizational Behavior - Motivational Theories at Mcdonald's ReportvnbioNessuna valutazione finora
- Cambridge IGCSE: 0500/11 First Language EnglishDocumento16 pagineCambridge IGCSE: 0500/11 First Language EnglishJonathan ChuNessuna valutazione finora
- 8 - Energy Balance of Solar CollectorsDocumento27 pagine8 - Energy Balance of Solar Collectorsftsebeek6164Nessuna valutazione finora
- 500 Grammar Based Conversation Question12Documento16 pagine500 Grammar Based Conversation Question12Ivo Barry Ward100% (1)