Potrebbero piacerti anche
- Sistema Antibloqueo de Ruedas: C.F.P.V./2003Documento33 pagineSistema Antibloqueo de Ruedas: C.F.P.V./2003HEYNessuna valutazione finora
- Bomba Rotativas FinalDocumento26 pagineBomba Rotativas FinalHEYNessuna valutazione finora
- Glosario FinalDocumento43 pagineGlosario FinalHEYNessuna valutazione finora
- Cap - 28 Diagnostico y Servicio de Los Sistemas Del Cotorl de EmisionesDocumento11 pagineCap - 28 Diagnostico y Servicio de Los Sistemas Del Cotorl de EmisionesHEYNessuna valutazione finora
- TORNILLOnnTUERCAnYnESPARRAGOnn1n 77619bb33878689Documento41 pagineTORNILLOnnTUERCAnYnESPARRAGOnn1n 77619bb33878689HEYNessuna valutazione finora
- Cap - 25 Diagnostico y Servicio de La Inyeccion Electronica Del ColbustibleDocumento16 pagineCap - 25 Diagnostico y Servicio de La Inyeccion Electronica Del ColbustibleHEYNessuna valutazione finora
- Micrómetro Palmer de ExterioresDocumento34 pagineMicrómetro Palmer de ExterioresAgata Fernandez GarciaNessuna valutazione finora
- Basiconmetrologiann 1 NDocumento148 pagineBasiconmetrologiann 1 NHEYNessuna valutazione finora
- Elementosdeunion 170110044306Documento53 pagineElementosdeunion 170110044306fanny_farias_3Nessuna valutazione finora
- ELnTORNILLO 35619bb331c82f1Documento17 pagineELnTORNILLO 35619bb331c82f1HEYNessuna valutazione finora
- Cap - 29 Equipo de Prueba y Afinacion Del MotorDocumento14 pagineCap - 29 Equipo de Prueba y Afinacion Del MotorHEYNessuna valutazione finora
- Cap - 30 Diagnostico Del Rendimiento Del Motor y Capacidad de ConduccionDocumento16 pagineCap - 30 Diagnostico Del Rendimiento Del Motor y Capacidad de ConduccionHEYNessuna valutazione finora
- Cap - 24 Sistemas Electronicos de Inyeccion de CombustibleDocumento17 pagineCap - 24 Sistemas Electronicos de Inyeccion de CombustibleHEYNessuna valutazione finora
- Cap - 26 Supercargadores y Turbo CargadoresDocumento13 pagineCap - 26 Supercargadores y Turbo CargadoresHEYNessuna valutazione finora
- Cap - 20 Sistemas de Encendido ElectronicoDocumento13 pagineCap - 20 Sistemas de Encendido ElectronicoHEYNessuna valutazione finora
- Cap - 21diagnostico y Servicio Del Sistema de EncendidoDocumento17 pagineCap - 21diagnostico y Servicio Del Sistema de EncendidoHEYNessuna valutazione finora
- Cap - 19 Fundamentos de Los Sistemas de EncendidoDocumento11 pagineCap - 19 Fundamentos de Los Sistemas de EncendidoHEYNessuna valutazione finora
- Cap - 23 Sistema de Combustible Carburado Diagnostico y ServicioDocumento11 pagineCap - 23 Sistema de Combustible Carburado Diagnostico y ServicioHEYNessuna valutazione finora
- CAP - 18 Luces Seguridad Señalizacion y Dispositivos de InformacionDocumento16 pagineCAP - 18 Luces Seguridad Señalizacion y Dispositivos de InformacionNikol DayanaNessuna valutazione finora
- Cap - 17 Operacion Yservicio Del Sistema de CargaDocumento17 pagineCap - 17 Operacion Yservicio Del Sistema de CargaHEY100% (1)
- Cap - 13 Servicio Al Sistema de EnfriamientoDocumento14 pagineCap - 13 Servicio Al Sistema de EnfriamientoHEY100% (1)
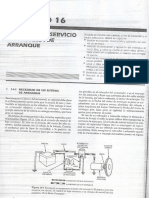
- CAP - 16 Operacion Del Sistema de ArranqueDocumento16 pagineCAP - 16 Operacion Del Sistema de ArranqueHEYNessuna valutazione finora
- Cap - 9 Sistemas de Combustible y Escape Del MotorDocumento18 pagineCap - 9 Sistemas de Combustible y Escape Del MotorHEYNessuna valutazione finora
- Cap - 15 Construccion y Servicios de La BateriasDocumento11 pagineCap - 15 Construccion y Servicios de La BateriasHEYNessuna valutazione finora
- Cap - 12 Sistemas de Enfriamiento Del MotorDocumento14 pagineCap - 12 Sistemas de Enfriamiento Del MotorHEY100% (1)
- Cap - 6 Introduccion A La Electricidad y A Los Controles Electronicos Del MotorDocumento14 pagineCap - 6 Introduccion A La Electricidad y A Los Controles Electronicos Del MotorHEYNessuna valutazione finora
- Cap - 14 Sistemas Electricos y Electronicos Del AutomovilDocumento14 pagineCap - 14 Sistemas Electricos y Electronicos Del AutomovilHEYNessuna valutazione finora
- Cap - 10 Servicio Al Sistema de Combustible y de EscapeDocumento16 pagineCap - 10 Servicio Al Sistema de Combustible y de EscapeHEYNessuna valutazione finora
- Cap - 8 Combustibles para El Motor Del AutomovilDocumento10 pagineCap - 8 Combustibles para El Motor Del AutomovilHEYNessuna valutazione finora
- Cap - 7 Mediciones y Rendimiento Del MotorDocumento10 pagineCap - 7 Mediciones y Rendimiento Del MotorHEYNessuna valutazione finora
- Tarea de Tercer ParcialDocumento7 pagineTarea de Tercer ParcialVidal UnickopNessuna valutazione finora
- Parcial Redes 2Documento5 pagineParcial Redes 2ANDRES FELIPE BARBOSA SALAMANCANessuna valutazione finora
- Kunak Consulting - Vectores de Ataques Protocolo RDP v3.0Documento18 pagineKunak Consulting - Vectores de Ataques Protocolo RDP v3.0Diego CarreñoNessuna valutazione finora
- IntroduccionDocumento3 pagineIntroduccionLLUIS ANTONIO QUISPE FLORESNessuna valutazione finora
- SDHDocumento16 pagineSDHGuppie GuzmánNessuna valutazione finora
- Modo Safe BootDocumento2 pagineModo Safe BootsusanalanisNessuna valutazione finora
- Control automático esencialDocumento31 pagineControl automático esencialLeonidas Miano0% (1)
- Apunte 2 Unidad 3Documento10 pagineApunte 2 Unidad 3Angie AparicioNessuna valutazione finora
- Entrega de BienesDocumento3 pagineEntrega de BienesAshlyLobatonCastilloNessuna valutazione finora
- Ecbol4 PDFDocumento7 pagineEcbol4 PDFFerdy Casaverde LopezNessuna valutazione finora
- Códigos de Error de Actualización Del Sistema Xbox 360Documento6 pagineCódigos de Error de Actualización Del Sistema Xbox 360daniel 666Nessuna valutazione finora
- Trabajo de Investigación - Alejandra Ballesteros GutierrezDocumento21 pagineTrabajo de Investigación - Alejandra Ballesteros GutierrezALEJANDRA BALLESTEROS GUTIERREZNessuna valutazione finora
- CreaBDAndroidStudioDocumento12 pagineCreaBDAndroidStudioJuan RamírezNessuna valutazione finora
- Caracteristicas de Los EquiposDocumento12 pagineCaracteristicas de Los Equiposandres castilloNessuna valutazione finora
- Installation en EsDocumento74 pagineInstallation en EsSaul ValenzuelaNessuna valutazione finora
- Programa de Administración de Base de DatosDocumento1 paginaPrograma de Administración de Base de DatosLuz PolancoNessuna valutazione finora
- Semana 02 - Poo - 01Documento8 pagineSemana 02 - Poo - 01ricardoNessuna valutazione finora
- Sistema control acceso huellas digitalesDocumento115 pagineSistema control acceso huellas digitaleschuchisNessuna valutazione finora
- P1 - Suma Con Registros Inicializados - DebugDocumento8 pagineP1 - Suma Con Registros Inicializados - DebugJavier GutierrezNessuna valutazione finora
- Impresora HPDocumento2 pagineImpresora HPkir4Nessuna valutazione finora
- ElectrocardiografoDocumento5 pagineElectrocardiografoMiguel AlfredoNessuna valutazione finora
- WINDOWSDocumento5 pagineWINDOWSyerson barretoNessuna valutazione finora
- Guia CapstoneDocumento9 pagineGuia CapstoneZalet ZuñigaNessuna valutazione finora
- Programación Windows API Con C++Documento268 pagineProgramación Windows API Con C++Ip GhosTNessuna valutazione finora
- Practica 6 Estructura Repetitiva Hacer MientrasDocumento4 paginePractica 6 Estructura Repetitiva Hacer MientrasJhpvfgfNessuna valutazione finora
- 10 EthernetDocumento21 pagine10 EthernetAlan MourentanNessuna valutazione finora
- JF 2 1 SG EspDocumento40 pagineJF 2 1 SG EspJuanJo InstructorNessuna valutazione finora
- Alu 1Documento6 pagineAlu 1gotem100preNessuna valutazione finora
- Trabajo Escrito de La InformáticaDocumento8 pagineTrabajo Escrito de La InformáticaSevastian CalderonNessuna valutazione finora
- Conector BergDocumento4 pagineConector BergLuis VerenzuelaNessuna valutazione finora