Potrebbero piacerti anche
- The Analysis of Aerodynamic Flutter of Suspension BridgesDocumento8 pagineThe Analysis of Aerodynamic Flutter of Suspension BridgesSebin GeorgeNessuna valutazione finora
- New Frontiers in Aerodynamic Tailoring oDocumento18 pagineNew Frontiers in Aerodynamic Tailoring oTam CaptainNessuna valutazione finora
- Jcam 2013Documento8 pagineJcam 2013ebrahem_sahil5188Nessuna valutazione finora
- Vibrations of An Aramid Anchor Cable Subjected To Turbulent WindDocumento18 pagineVibrations of An Aramid Anchor Cable Subjected To Turbulent WindSparrow JackNessuna valutazione finora
- Collapse Analysis of A Transmission Tower Under Wind ExcitationDocumento7 pagineCollapse Analysis of A Transmission Tower Under Wind ExcitationRm1262100% (1)
- Energies 15 03925 v2Documento18 pagineEnergies 15 03925 v2Mariana Souza RechtmanNessuna valutazione finora
- Computer Simulation of Bu Eting Actions of Suspension Bridges Under Turbulent WindDocumento11 pagineComputer Simulation of Bu Eting Actions of Suspension Bridges Under Turbulent WindPCPCNessuna valutazione finora
- Ocean Engineering: Mingsheng Chen, Rodney Eatock Taylor, Yoo Sang ChooDocumento12 pagineOcean Engineering: Mingsheng Chen, Rodney Eatock Taylor, Yoo Sang ChooEliotPezoZegarraNessuna valutazione finora
- Journal of Wind Engineering and Industrial Aerodynamics: Namhun Lee, Hyungro Lee, Chung Baek, Seungsoo LeeDocumento12 pagineJournal of Wind Engineering and Industrial Aerodynamics: Namhun Lee, Hyungro Lee, Chung Baek, Seungsoo LeeAlexandre AraujoNessuna valutazione finora
- Engineering Structures: Khawaja Ali, Hiroshi Katsuchi, Hitoshi YamadaDocumento17 pagineEngineering Structures: Khawaja Ali, Hiroshi Katsuchi, Hitoshi Yamadakhawaja AliNessuna valutazione finora
- Structural Capacity and Failure Mechanisms of Transmission Towers Under High Intensity Wind LoadingDocumento9 pagineStructural Capacity and Failure Mechanisms of Transmission Towers Under High Intensity Wind LoadingRm1262Nessuna valutazione finora
- Flutter Suppression in Long-Span Suspension Bridges by Arrays of Hysteretic Tuned Mass DampersDocumento10 pagineFlutter Suppression in Long-Span Suspension Bridges by Arrays of Hysteretic Tuned Mass DampersNadji ChiNessuna valutazione finora
- Applsci 13 06389 v2Documento21 pagineApplsci 13 06389 v2HassanNessuna valutazione finora
- Flutter of Subsonic WingDocumento11 pagineFlutter of Subsonic WingmamalilariNessuna valutazione finora
- Ifsm PDFDocumento17 pagineIfsm PDFsebinNessuna valutazione finora
- Computers & Fluids: M. Sergio Campobasso, Andreas Piskopakis, Jernej Drofelnik, Adrian JacksonDocumento20 pagineComputers & Fluids: M. Sergio Campobasso, Andreas Piskopakis, Jernej Drofelnik, Adrian JacksonRomizNessuna valutazione finora
- Aerodynamic Admittance Functions of BridDocumento10 pagineAerodynamic Admittance Functions of BridTam CaptainNessuna valutazione finora
- PP 1Documento23 paginePP 1Buay BuayNessuna valutazione finora
- Buildings 12 01338Documento17 pagineBuildings 12 01338app.nireaNessuna valutazione finora
- Aerodynamic Loads On Tall Buildings: Interactive DatabaseDocumento11 pagineAerodynamic Loads On Tall Buildings: Interactive DatabaseHCStepNessuna valutazione finora
- Martinez Vazquez2016WinddesignspectraDocumento12 pagineMartinez Vazquez2016WinddesignspectraAmerico TorchNessuna valutazione finora
- A Comparative Study On The Dynamic Response of Three Semisubmersible Floating Offshore Wind TurbinesDocumento11 pagineA Comparative Study On The Dynamic Response of Three Semisubmersible Floating Offshore Wind TurbinesVũ Quý HoàNessuna valutazione finora
- Linear Analysis of Guyed MastDocumento6 pagineLinear Analysis of Guyed MastPankaj_Taneja_9684Nessuna valutazione finora
- 0 - Actions On Structures Wind Loads - CIB ReportDocumento100 pagine0 - Actions On Structures Wind Loads - CIB ReportWilliam PolNessuna valutazione finora
- A Simple Replacment For The Drift Spectrum 2002 Engineering StructuresDocumento8 pagineA Simple Replacment For The Drift Spectrum 2002 Engineering Structuresldd1216Nessuna valutazione finora
- Dynamic Reliability Analysis of Tower Crane With WDocumento8 pagineDynamic Reliability Analysis of Tower Crane With WYoucef ABARNessuna valutazione finora
- Articulo de CFDDocumento13 pagineArticulo de CFDPablo OrtegaNessuna valutazione finora
- Wind Effects On The Cross Section of A Suspension Bridge by CFD AnalysisDocumento13 pagineWind Effects On The Cross Section of A Suspension Bridge by CFD AnalysisWong Sin YanNessuna valutazione finora
- Characteristics of Distributed Aerodynamic Forces On A Twin-BoxDocumento15 pagineCharacteristics of Distributed Aerodynamic Forces On A Twin-BoxBridge&StructureNessuna valutazione finora
- Wind-Induced Fatigue Analysis of Wind Turbine SteeDocumento10 pagineWind-Induced Fatigue Analysis of Wind Turbine SteeMarco FigueiredoNessuna valutazione finora
- Kareem 1990 PDFDocumento13 pagineKareem 1990 PDFsukanya12345Nessuna valutazione finora
- Dissertation AerodynamicsDocumento4 pagineDissertation AerodynamicsPaySomeoneToWriteYourPaperPittsburgh100% (1)
- Journal of Fluids and Structures: Shaopeng Li, Mingshui Li, Guy L. LaroseDocumento23 pagineJournal of Fluids and Structures: Shaopeng Li, Mingshui Li, Guy L. LaroseAlexandre AraujoNessuna valutazione finora
- Calculation of The Crosswind Displacement of PantographsDocumento16 pagineCalculation of The Crosswind Displacement of PantographsThangadurai Senthil Ram PrabhuNessuna valutazione finora
- Fatigue Analysis of Offshore Wind TurbinDocumento18 pagineFatigue Analysis of Offshore Wind TurbinDao Ba ThanhNessuna valutazione finora
- Dynamic Crosswind Fatigue of Slender Vertical Structures: Wind and Structures, Vol. 5, No. 6 (2002) 527-542Documento16 pagineDynamic Crosswind Fatigue of Slender Vertical Structures: Wind and Structures, Vol. 5, No. 6 (2002) 527-542OkayNessuna valutazione finora
- Kites 1Documento8 pagineKites 1Jose SalvadorNessuna valutazione finora
- Ijera 106 PDFDocumento6 pagineIjera 106 PDFshailesh goralNessuna valutazione finora
- 2004 - Aeroelastic Response of An Airfoil-Flap System Exposed To Time-Dependent DisturbancesDocumento13 pagine2004 - Aeroelastic Response of An Airfoil-Flap System Exposed To Time-Dependent DisturbancesFedericoBettiNessuna valutazione finora
- Transonic Speed Flutter Analysis of A Rectangular Wing Using The OpenFOAM Computational Fluid Dynamics Code and The Dynamic Stiffness MethodDocumento16 pagineTransonic Speed Flutter Analysis of A Rectangular Wing Using The OpenFOAM Computational Fluid Dynamics Code and The Dynamic Stiffness MethodFurkan KesimNessuna valutazione finora
- 2023 Coupled Numerical Simulation of Liquid Sloshing Dampers and Wind-Structure Simulation ModelDocumento19 pagine2023 Coupled Numerical Simulation of Liquid Sloshing Dampers and Wind-Structure Simulation ModelTuong BuiNessuna valutazione finora
- Static Aeroelasticity: I H I I BL H L H U LL LL L Ul I I L U I I L 1Documento1 paginaStatic Aeroelasticity: I H I I BL H L H U LL LL L Ul I I L U I I L 1OSCARDELTANessuna valutazione finora
- Jameson - Science.1989 245Documento20 pagineJameson - Science.1989 245Mohamed FaidallaNessuna valutazione finora
- 10.1109 Repe50851.2020.9253964Documento5 pagine10.1109 Repe50851.2020.9253964amin.bigdelii1375Nessuna valutazione finora
- Down BurstDocumento8 pagineDown BurstBilal MuhammadNessuna valutazione finora
- (2001) Dynamic Load Simulator PDFDocumento6 pagine(2001) Dynamic Load Simulator PDFAlejandro López LlanusaNessuna valutazione finora
- Modeling of Aerodynamic Flutter On A NACA 4412 Airfoil Wind Blade (Final)Documento7 pagineModeling of Aerodynamic Flutter On A NACA 4412 Airfoil Wind Blade (Final)Alfa BetaNessuna valutazione finora
- Aerodynamics of A Multi-Element Airfoil Near Ground: LL LL LLDocumento6 pagineAerodynamics of A Multi-Element Airfoil Near Ground: LL LL LLVimal ChandNessuna valutazione finora
- Stability and Open Loop Dynamics of VeryDocumento24 pagineStability and Open Loop Dynamics of VeryRedkit ofFootHillNessuna valutazione finora
- Engineering Structures: Mahir Ülker-Kaustell, Raid Karoumi, Costin PacosteDocumento7 pagineEngineering Structures: Mahir Ülker-Kaustell, Raid Karoumi, Costin PacosteBRAYAN GERARDO AREVALO MENDOZANessuna valutazione finora
- (2012) Analysis of Jacking Force For Rectangular Pipe-Jacking Machine (Przeglad Elektrotechniczny) Scopes Volume 88, Issue 9 B, Pages 200 - 203Documento4 pagine(2012) Analysis of Jacking Force For Rectangular Pipe-Jacking Machine (Przeglad Elektrotechniczny) Scopes Volume 88, Issue 9 B, Pages 200 - 203Rajesh WanwadeNessuna valutazione finora
- 1978-Taylor-IJNME-The Dynamics of Offshore Structures Evaluated by Boundary Integral Techniques.Documento20 pagine1978-Taylor-IJNME-The Dynamics of Offshore Structures Evaluated by Boundary Integral Techniques.HemanthNessuna valutazione finora
- 21 Baker The Simulation of Unsteady Aerodynamic Cross Wind Forces On TrainsDocumento12 pagine21 Baker The Simulation of Unsteady Aerodynamic Cross Wind Forces On TrainsDoicielNessuna valutazione finora
- Analysis of Wind Forces On A High-Rise Building by RANS-Based Turbulence Models Using Computational Fluid DynamicsDocumento7 pagineAnalysis of Wind Forces On A High-Rise Building by RANS-Based Turbulence Models Using Computational Fluid DynamicsKamal DavuNessuna valutazione finora
- Ii2 FX SupartonoDocumento13 pagineIi2 FX SupartonoekaNessuna valutazione finora
- Ipc2012 90137Documento7 pagineIpc2012 90137Marcelo Varejão CasarinNessuna valutazione finora
- Computational Wind Engineering 1: Proceedings of the 1st International Symposium on Computational Wind Engineering (CWE 92) Tokyo, Japan, August 21-23, 1992Da EverandComputational Wind Engineering 1: Proceedings of the 1st International Symposium on Computational Wind Engineering (CWE 92) Tokyo, Japan, August 21-23, 1992S. MurakamiNessuna valutazione finora
- Module II (12 Hours)Documento1 paginaModule II (12 Hours)Sebin GeorgeNessuna valutazione finora
- KNE216/KNE716 Civil Engineering 1: First and Only Paper Ordinary ExaminationDocumento8 pagineKNE216/KNE716 Civil Engineering 1: First and Only Paper Ordinary ExaminationSebin GeorgeNessuna valutazione finora
- Module II (12 Hours)Documento1 paginaModule II (12 Hours)Sebin GeorgeNessuna valutazione finora
- 1986/18. Foundation Conditions at A Proposed Flagpole Site, Lower Macquarie Street, HobartDocumento3 pagine1986/18. Foundation Conditions at A Proposed Flagpole Site, Lower Macquarie Street, HobartSebin GeorgeNessuna valutazione finora
- Follow Safe Practices For Direct Client Care - DoneDocumento55 pagineFollow Safe Practices For Direct Client Care - DoneSebin George0% (7)
- 12references PDFDocumento21 pagine12references PDFSebin GeorgeNessuna valutazione finora
- Engineering Structures: Michael Styrk Andersen, Jens Johansson, Anders Brandt, Svend Ole HansenDocumento10 pagineEngineering Structures: Michael Styrk Andersen, Jens Johansson, Anders Brandt, Svend Ole HansenSebin GeorgeNessuna valutazione finora
- Engineering Structures: Review ArticleDocumento8 pagineEngineering Structures: Review ArticleSebin GeorgeNessuna valutazione finora
- KNE712 Assignment3Documento4 pagineKNE712 Assignment3Sebin GeorgeNessuna valutazione finora
- KNE373 Prac 1 - Direct Shear Strength TestDocumento4 pagineKNE373 Prac 1 - Direct Shear Strength TestSebin GeorgeNessuna valutazione finora
- Finite Element AnalysisDocumento18 pagineFinite Element AnalysisSebin GeorgeNessuna valutazione finora
- Kma 252 Exam 18 NewstyleDocumento19 pagineKma 252 Exam 18 NewstyleSebin GeorgeNessuna valutazione finora
- Leela - Unni RDocumento16 pagineLeela - Unni RSwaroop Jain100% (5)
- Historical View of Long-Span Bridge Aerodynamics: Article in PressDocumento18 pagineHistorical View of Long-Span Bridge Aerodynamics: Article in PressSebin GeorgeNessuna valutazione finora
- Flutter Analysis of Suspension Bridges: by Sebin George 501533Documento4 pagineFlutter Analysis of Suspension Bridges: by Sebin George 501533Sebin GeorgeNessuna valutazione finora
- KNE351 KNE751 Exam 2016 SolutionsDocumento18 pagineKNE351 KNE751 Exam 2016 SolutionsSebin GeorgeNessuna valutazione finora
- AAPL Capability StatementDocumento41 pagineAAPL Capability StatementjsmnjasminesNessuna valutazione finora
- TMG PC Strands, Wire & BarDocumento10 pagineTMG PC Strands, Wire & BarHenrique Braglia PachecoNessuna valutazione finora
- Structural DesignDocumento118 pagineStructural DesignnoahNessuna valutazione finora
- Conexion Viga - PilarDocumento5 pagineConexion Viga - PilarAlejandro OspinaNessuna valutazione finora
- 04 - Data Sheet - Mech Seals-Cipf Inj PumpDocumento3 pagine04 - Data Sheet - Mech Seals-Cipf Inj Pumpisaac2408Nessuna valutazione finora
- Electrostatic AnalyzerDocumento6 pagineElectrostatic AnalyzerKcirtap ZkethNessuna valutazione finora
- Refrigerant Recovery System 3600Documento20 pagineRefrigerant Recovery System 3600lorenzoNessuna valutazione finora
- Matching: Match Each Item With The Correct Statement BelowDocumento16 pagineMatching: Match Each Item With The Correct Statement BelowwallaNessuna valutazione finora
- Numerical Simulation of Nonlinear Engineering Problems Using LS DYNADocumento26 pagineNumerical Simulation of Nonlinear Engineering Problems Using LS DYNAgaman leeNessuna valutazione finora
- A Study of Preparation of Light Colored Photosensitive Lquid NRDocumento225 pagineA Study of Preparation of Light Colored Photosensitive Lquid NRThai KhangNessuna valutazione finora
- Lesson Notes About SoundsDocumento6 pagineLesson Notes About Soundsmark joseph cometaNessuna valutazione finora
- Matachana - AP4 - Water Treatment System For Steriliser - User ManualDocumento8 pagineMatachana - AP4 - Water Treatment System For Steriliser - User ManualWahidi AzaniNessuna valutazione finora
- Fiber-Optic Communication Is A Method of Transmitting InformationDocumento19 pagineFiber-Optic Communication Is A Method of Transmitting Informationpy thonNessuna valutazione finora
- Structure of The EarthDocumento10 pagineStructure of The EarthA 3Nessuna valutazione finora
- Mixtures and SeparationDocumento33 pagineMixtures and SeparationArvin DalisayNessuna valutazione finora
- (Misal Gandhi) - Smart MaterialsDocumento20 pagine(Misal Gandhi) - Smart MaterialsEr Mishal GandhiNessuna valutazione finora
- Power Train: - 170 - STMGXXX 4/97Documento66 paginePower Train: - 170 - STMGXXX 4/97Evan AT YoelNessuna valutazione finora
- TextDocumento6 pagineTextRisyane Yoandira AgnesaNessuna valutazione finora
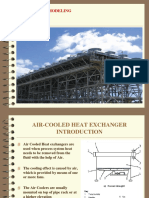
- Air Cooler-Modeling and AnalysisDocumento25 pagineAir Cooler-Modeling and Analysisvivek100% (1)
- Demand Capacity Ratios Calculations For 3D Frame ElementsDocumento2 pagineDemand Capacity Ratios Calculations For 3D Frame ElementsLuis Martins0% (1)
- 2.2 Density & Specic GrvityDocumento14 pagine2.2 Density & Specic Grvityurvish_soniNessuna valutazione finora
- 1 Corrosion in Water Distribution System of Service & Fire Water SystemDocumento7 pagine1 Corrosion in Water Distribution System of Service & Fire Water SystemprakashNessuna valutazione finora
- Nuclear Heat TransferDocumento14 pagineNuclear Heat TransferDilip YadavNessuna valutazione finora
- Introduction To Materials: Prof. H. K. KhairaDocumento75 pagineIntroduction To Materials: Prof. H. K. KhairaDhanush NairNessuna valutazione finora
- Experiment #3: Sublimation and Melting Point DeterminationDocumento3 pagineExperiment #3: Sublimation and Melting Point DeterminationMarthy DayagNessuna valutazione finora
- Chpt6SM PDFDocumento28 pagineChpt6SM PDFinal arinalNessuna valutazione finora
- Speed and Velocity: Circular and Satellite Motion NameDocumento1 paginaSpeed and Velocity: Circular and Satellite Motion NameAnthony QuanNessuna valutazione finora
- Above Ground Pipeline DesignDocumento15 pagineAbove Ground Pipeline DesigndilimgeNessuna valutazione finora
- SCAPS Manual March 2015Documento107 pagineSCAPS Manual March 2015azertyqsdfghjklmNessuna valutazione finora