Potrebbero piacerti anche
- Practical, Made Easy Guide To Robotics & Automation [Revised Edition]Da EverandPractical, Made Easy Guide To Robotics & Automation [Revised Edition]Valutazione: 1 su 5 stelle1/5 (1)
- 87 DesignDocumento4 pagine87 Designmadhanreddy953Nessuna valutazione finora
- Design, Analysis and Testing of Spindle For High Speed CNC Lathe MachineDocumento8 pagineDesign, Analysis and Testing of Spindle For High Speed CNC Lathe MachineArif NurrohmanNessuna valutazione finora
- Blade ArrangmentsDocumento6 pagineBlade ArrangmentsRavi MirzaNessuna valutazione finora
- Design and Analysis of An Articulated Robot ArmDocumento8 pagineDesign and Analysis of An Articulated Robot ArmSamuel AbraghamNessuna valutazione finora
- 3-Axis CNC Router Modifiable To 3D Printer: Nternational Ournal of Nnovative Esearch in Cience, Ngineering and EchnologyDocumento8 pagine3-Axis CNC Router Modifiable To 3D Printer: Nternational Ournal of Nnovative Esearch in Cience, Ngineering and EchnologyAmer AlbasserNessuna valutazione finora
- 191 52 MadhuDocumento11 pagine191 52 MadhuDekeba GetemaNessuna valutazione finora
- Design and Fabrication of Angular DrillingDocumento8 pagineDesign and Fabrication of Angular DrillingvasanthNessuna valutazione finora
- 57 - Fabrication and Analysis of Chairless Chair 1 - 1Documento9 pagine57 - Fabrication and Analysis of Chairless Chair 1 - 1Akash Chiman100% (1)
- Gearless Transmission Mechanism and Its ApplicationsDocumento6 pagineGearless Transmission Mechanism and Its ApplicationsChandrasekhar KolluNessuna valutazione finora
- Design Implementation ofDocumento9 pagineDesign Implementation ofilusimataNessuna valutazione finora
- Design and Analysis of A Mobile Robot For Storage and Retrieval SystemDocumento9 pagineDesign and Analysis of A Mobile Robot For Storage and Retrieval SystemRudy YoussefNessuna valutazione finora
- PLC Based Pick and Place Robot With 4 DOF: Nternational Ournal of Nnovative Esearch in Cience, Ngineering and EchnologyDocumento5 paginePLC Based Pick and Place Robot With 4 DOF: Nternational Ournal of Nnovative Esearch in Cience, Ngineering and EchnologyGS AshishNessuna valutazione finora
- 13 013 Design PDFDocumento6 pagine13 013 Design PDFMayur RaundalNessuna valutazione finora
- Robotics Mid 1 Answers: Explain The Classification of Robots by Coordinate System? I. Ans) Cartesian RobotsDocumento14 pagineRobotics Mid 1 Answers: Explain The Classification of Robots by Coordinate System? I. Ans) Cartesian RobotsRahul RoyNessuna valutazione finora
- 3 DOF ManipulatorDocumento6 pagine3 DOF ManipulatorKhaled SaadNessuna valutazione finora
- Preliminary Development of A Robotic Hip-Knee Exoskeleton With 3dprinted Backdrivable ActuatorsDocumento7 paginePreliminary Development of A Robotic Hip-Knee Exoskeleton With 3dprinted Backdrivable Actuatorsalyssia.adiaNessuna valutazione finora
- Dynamic Analysis of Machine Foundation-INFODocumento8 pagineDynamic Analysis of Machine Foundation-INFOjakeer7Nessuna valutazione finora
- Robotics Lab ManualDocumento34 pagineRobotics Lab ManualKarthikeyan AruNessuna valutazione finora
- Design and Fabrication of Paper Cutting Machine Using Geneva MechanismDocumento7 pagineDesign and Fabrication of Paper Cutting Machine Using Geneva MechanismKunal BidkarNessuna valutazione finora
- Design and Analysis of Frame For Electric MotorcycleDocumento8 pagineDesign and Analysis of Frame For Electric MotorcycleChu Ngọc TúNessuna valutazione finora
- 17 06 Scitech BilleDocumento12 pagine17 06 Scitech BilleBenjamin JenettNessuna valutazione finora
- Industrial Robotics and IotDocumento20 pagineIndustrial Robotics and IotrgowdamithunpvtNessuna valutazione finora
- Comparative Analysis of Different Lateral Load Resisting System For RCC StructureDocumento6 pagineComparative Analysis of Different Lateral Load Resisting System For RCC StructureAkhilesh B.MNessuna valutazione finora
- Designing and Development of Prototype Hover BikeDocumento7 pagineDesigning and Development of Prototype Hover BikeSriram MuruganNessuna valutazione finora
- Ball Joint DesignDocumento8 pagineBall Joint DesignRatnakar PatilNessuna valutazione finora
- 1.design and Fabrication of A Go KartDocumento8 pagine1.design and Fabrication of A Go KartRicardo Wan AgueroNessuna valutazione finora
- Robotic Arm12Documento13 pagineRobotic Arm12Yati SharmaNessuna valutazione finora
- CEG4392 IntroRobotics ArmsDocumento6 pagineCEG4392 IntroRobotics ArmsWahyu AnggardiNessuna valutazione finora
- Industrial Robotics and Control Assignment: Q) 1 Explain Industrial Internet of Things?Documento8 pagineIndustrial Robotics and Control Assignment: Q) 1 Explain Industrial Internet of Things?vara prasadNessuna valutazione finora
- Design and Analysis of Dual Side Shaper Using Scotch Yoke MechanismDocumento8 pagineDesign and Analysis of Dual Side Shaper Using Scotch Yoke MechanismDavid CristhianNessuna valutazione finora
- Design and Fatigue Analysis of Crankshaft: Nternational Ournal of Nnovative Esearch in Cience, Ngineering and EchnologyDocumento4 pagineDesign and Fatigue Analysis of Crankshaft: Nternational Ournal of Nnovative Esearch in Cience, Ngineering and EchnologyAshutosh VermaNessuna valutazione finora
- ProjectDocumento10 pagineProjectMUHAMMAD RASHIDNessuna valutazione finora
- Design and Fabrication of The Rotating & Tilting Vice: I J I R S E TDocumento3 pagineDesign and Fabrication of The Rotating & Tilting Vice: I J I R S E TSureshNessuna valutazione finora
- Automation and Robotics Week 08 Theory Notes 20ME51IDocumento18 pagineAutomation and Robotics Week 08 Theory Notes 20ME51IThanmay JSNessuna valutazione finora
- The Development of Hexapod Kinematic Machine: Keywords: Parallel Kinematic Structure, Control System, CNC Machine ToolDocumento4 pagineThe Development of Hexapod Kinematic Machine: Keywords: Parallel Kinematic Structure, Control System, CNC Machine ToolMilan Ynwa JovicicNessuna valutazione finora
- Project SynopsisDocumento8 pagineProject Synopsistaran jot100% (1)
- Apoorva Tyagi-Formula Student Chassis Paper-Research PaperDocumento6 pagineApoorva Tyagi-Formula Student Chassis Paper-Research PaperApoorv TyagiNessuna valutazione finora
- 66 20 GestureDocumento8 pagine66 20 GestureAfsin RabbaniNessuna valutazione finora
- Diagrid Structure Square in Plan - PushoverDocumento5 pagineDiagrid Structure Square in Plan - Pushovermaikol cantorNessuna valutazione finora
- Design and Analysis of Drum Lathe For Manufacturing Large-Scale Optical Microstructured Surface and Load Characteristics of Aerostatic SpindleDocumento6 pagineDesign and Analysis of Drum Lathe For Manufacturing Large-Scale Optical Microstructured Surface and Load Characteristics of Aerostatic SpindleN. P. JAGANNessuna valutazione finora
- Design & Development of Twin Drill Head Machine and Drilling Depth ControlDocumento12 pagineDesign & Development of Twin Drill Head Machine and Drilling Depth ControlSolomon DuferaNessuna valutazione finora
- Autonomous Control and Implementation of Coconut Tree ClimbingDocumento12 pagineAutonomous Control and Implementation of Coconut Tree ClimbingPebriu PratamaNessuna valutazione finora
- Ijaer Cmss CNCDocumento11 pagineIjaer Cmss CNCDuy TrầnNessuna valutazione finora
- Trade 3 PDFDocumento6 pagineTrade 3 PDFRajveer Singh SachdevNessuna valutazione finora
- Analysis of Spur Gear Using Composite MaterialDocumento9 pagineAnalysis of Spur Gear Using Composite MaterialIJRASETPublicationsNessuna valutazione finora
- Core Cutting Machine Ijariie12718Documento5 pagineCore Cutting Machine Ijariie12718Habteyes AbateNessuna valutazione finora
- Construction of Wheel ChairDocumento6 pagineConstruction of Wheel ChairKumar SonuNessuna valutazione finora
- Design and Fabrication of Motorized Stairs Climbing Vehicle IJERTV5IS060469Documento8 pagineDesign and Fabrication of Motorized Stairs Climbing Vehicle IJERTV5IS060469Rishi YadavNessuna valutazione finora
- 43 - 6 - Final Manuscript Ij61111623Documento3 pagine43 - 6 - Final Manuscript Ij61111623skNessuna valutazione finora
- Dinkar Singh SengarDocumento11 pagineDinkar Singh SengarŚandeep Ķumar ŠinghNessuna valutazione finora
- 2016-Prasad-55 - Fluid - FSI of HDB Using CFD-IJIRSETDocumento9 pagine2016-Prasad-55 - Fluid - FSI of HDB Using CFD-IJIRSETAlex CooperNessuna valutazione finora
- Fesfsd DSFSD FdsDocumento6 pagineFesfsd DSFSD Fdssscbemech90.backup01Nessuna valutazione finora
- Design and Analysis of Propeller Shaft: Nternational Ournal of Nnovative Esearch in Cience, Ngineering and EchnologyDocumento9 pagineDesign and Analysis of Propeller Shaft: Nternational Ournal of Nnovative Esearch in Cience, Ngineering and EchnologyRaja ManeNessuna valutazione finora
- Numerical Analysis of Three Span Continuous Bridge Deflection by Using RotationDocumento7 pagineNumerical Analysis of Three Span Continuous Bridge Deflection by Using RotationMarviounerNessuna valutazione finora
- Project Report 360 Degree Drilling MachineDocumento11 pagineProject Report 360 Degree Drilling MachineSumit Bijwe80% (5)
- Design and Analysis of An Articulated Robot Arm For Various Industrial ApplicationsDocumento12 pagineDesign and Analysis of An Articulated Robot Arm For Various Industrial Applicationsاقْرَأْ وَرَبُّكَ الْأَكْرَمُNessuna valutazione finora
- Ahmad Najib 135833 - Assigment (Part DR Wan) - Eem345 ManufactDocumento9 pagineAhmad Najib 135833 - Assigment (Part DR Wan) - Eem345 ManufactNajib HairiNessuna valutazione finora
- Shintemirov MESA 2014Documento7 pagineShintemirov MESA 2014اقْرَأْ وَرَبُّكَ الْأَكْرَمُNessuna valutazione finora
- Introduction of Gears:: 1.2 Gears For Parallel ShaftsDocumento16 pagineIntroduction of Gears:: 1.2 Gears For Parallel ShaftsnareshNessuna valutazione finora
- Overview of Solar DesalinationDocumento17 pagineOverview of Solar Desalinationalagar krishna kumarNessuna valutazione finora
- Desalination by Using Alternative EnergyDocumento20 pagineDesalination by Using Alternative Energyalagar krishna kumarNessuna valutazione finora
- Mechatronics: Pushparaj Mani PathakDocumento36 pagineMechatronics: Pushparaj Mani Pathakalagar krishna kumarNessuna valutazione finora
- Sciencedirect Sciencedirect SciencedirectDocumento4 pagineSciencedirect Sciencedirect Sciencedirectalagar krishna kumarNessuna valutazione finora
- s17 PDFDocumento5 pagines17 PDFalagar krishna kumarNessuna valutazione finora
- Intro Robot Kinematics 5Documento25 pagineIntro Robot Kinematics 5Gnanesh PendliNessuna valutazione finora
- Static Analysis of A 6 - Axis Industrial Robot Using Finite Element AnalysisDocumento7 pagineStatic Analysis of A 6 - Axis Industrial Robot Using Finite Element Analysisalagar krishna kumarNessuna valutazione finora
- Stress TypesDocumento1 paginaStress Typesalagar krishna kumarNessuna valutazione finora
- Unit 14 - Week 12: Assignment 12Documento5 pagineUnit 14 - Week 12: Assignment 12alagar krishna kumarNessuna valutazione finora
- A Vibration Analysis of A 6 Axis Industrial Robot Using Fea: SciencedirectDocumento8 pagineA Vibration Analysis of A 6 Axis Industrial Robot Using Fea: Sciencedirectalagar krishna kumarNessuna valutazione finora
- Agreement Gold LoanDocumento4 pagineAgreement Gold Loanalagar krishna kumarNessuna valutazione finora
- Writing Goals and Objectives GoalsDocumento2 pagineWriting Goals and Objectives Goalsalagar krishna kumarNessuna valutazione finora
- For Compressible Flow:: Displacement Thickness: It Is Denoted byDocumento1 paginaFor Compressible Flow:: Displacement Thickness: It Is Denoted byalagar krishna kumarNessuna valutazione finora
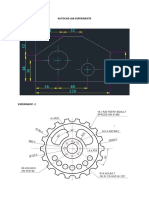
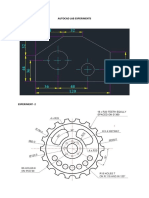
- Autocad Lab Experiments Experiment - 1Documento3 pagineAutocad Lab Experiments Experiment - 1alagar krishna kumarNessuna valutazione finora
- Understanding Volume Kinetics: Robert G. HahnDocumento9 pagineUnderstanding Volume Kinetics: Robert G. Hahnalagar krishna kumarNessuna valutazione finora
- Fluid Mechanics Is A Branch of Science Which Deals With Fluids inDocumento6 pagineFluid Mechanics Is A Branch of Science Which Deals With Fluids inalagar krishna kumarNessuna valutazione finora
- EGD Diagrams1Documento3 pagineEGD Diagrams1alagar krishna kumarNessuna valutazione finora
- Life QuotesDocumento2 pagineLife Quotesalagar krishna kumarNessuna valutazione finora
- Introduction To Syncsort MF ProductsDocumento8 pagineIntroduction To Syncsort MF ProductsMarcioNessuna valutazione finora
- Win98 DosboxDocumento8 pagineWin98 DosboxGabriel Caicedo RussyNessuna valutazione finora
- Bulan: Mei 2021 NO Nama Nip/Nrp PenempatanDocumento9 pagineBulan: Mei 2021 NO Nama Nip/Nrp PenempatanRendika RealitaNessuna valutazione finora
- XLD User ManualDocumento59 pagineXLD User ManualThitirat TuntrakulNessuna valutazione finora
- 1SNC160001C0205 Cha1Documento144 pagine1SNC160001C0205 Cha1Nelson SilvaNessuna valutazione finora
- File Allocation TableDocumento22 pagineFile Allocation TableSimon Drake ConstantineNessuna valutazione finora
- Manual StereoDocumento29 pagineManual StereoPeter Mac RedNessuna valutazione finora
- Wolaita Sodo University School of Informatics: Department of Information TechnologyDocumento4 pagineWolaita Sodo University School of Informatics: Department of Information TechnologyYonas BelayNessuna valutazione finora
- The Beginners Guide To Robotc: Volume 1, 3 EditionDocumento16 pagineThe Beginners Guide To Robotc: Volume 1, 3 EditionweweNessuna valutazione finora
- Fast Cam SystemsDocumento4 pagineFast Cam Systemsfarhan_82Nessuna valutazione finora
- RedBoard SIK 3.2Documento88 pagineRedBoard SIK 3.2TronNessuna valutazione finora
- Perform Lathe Manual PDFDocumento12 paginePerform Lathe Manual PDFsimon pNessuna valutazione finora
- Quantum ComputerDocumento14 pagineQuantum ComputerJyoti Prakash GiriNessuna valutazione finora
- 1Z0-883: MySQL 5.6 Database AdministratorDocumento74 pagine1Z0-883: MySQL 5.6 Database AdministratorManolo PérezNessuna valutazione finora
- Msi ms-7125 Rev 0a SCH PDFDocumento33 pagineMsi ms-7125 Rev 0a SCH PDFSebastian QuaroneNessuna valutazione finora
- Getting The Most From Your Electric MotorsDocumento44 pagineGetting The Most From Your Electric MotorsIdhamtanahbaruNessuna valutazione finora
- OpenMax OverViewDocumento45 pagineOpenMax OverViewRajat JindalNessuna valutazione finora
- CIS Apple macOS 10.13 Benchmark v1.0.0 PDFDocumento196 pagineCIS Apple macOS 10.13 Benchmark v1.0.0 PDFJohn DavisonNessuna valutazione finora
- Getting Started GuideDocumento24 pagineGetting Started GuideajfcardosoNessuna valutazione finora
- Obj BrowseDocumento4 pagineObj BrowseRaghunath Madduri0% (1)
- Sample Security PlanDocumento8 pagineSample Security PlanAntonio EspinosaNessuna valutazione finora
- 4B Drop Forged Chain CatalogDocumento7 pagine4B Drop Forged Chain CatalogCarlos CatalánNessuna valutazione finora
- CS2100 Computer Organisation: (AY20011/12) Semester 1Documento63 pagineCS2100 Computer Organisation: (AY20011/12) Semester 1amandaNessuna valutazione finora
- Unit 10 Vocabulary Related To TechnologyDocumento2 pagineUnit 10 Vocabulary Related To Technologyhbat saidNessuna valutazione finora
- Finite Diff PDFDocumento14 pagineFinite Diff PDFElshan AliyevNessuna valutazione finora
- Gforth-0 7 0 PDFDocumento282 pagineGforth-0 7 0 PDFdehammoNessuna valutazione finora
- 4-Pilosov Metro WDMDocumento20 pagine4-Pilosov Metro WDMkieunp1198Nessuna valutazione finora
- A321 Fixed EFB - Laptop Install.Documento9 pagineA321 Fixed EFB - Laptop Install.Russ HoweNessuna valutazione finora
- Yokogawa Pag 121 PDFDocumento175 pagineYokogawa Pag 121 PDFAnonymous malHQ6100% (1)
- AMP Question Bank Unit Wise Dr. P.R. Deshmukh PDFDocumento3 pagineAMP Question Bank Unit Wise Dr. P.R. Deshmukh PDFnskprasad89Nessuna valutazione finora
![Practical, Made Easy Guide To Robotics & Automation [Revised Edition]](https://imgv2-1-f.scribdassets.com/img/word_document/253466853/149x198/4281882d40/1709916831?v=1)