Potrebbero piacerti anche
- Motion Analysis of 4 Axis Robotic Arm With Inverse Kinematics For Industrial ApplicationDocumento9 pagineMotion Analysis of 4 Axis Robotic Arm With Inverse Kinematics For Industrial ApplicationAkky AkkyNessuna valutazione finora
- Control and Design of Robotic Arm3Documento7 pagineControl and Design of Robotic Arm3kyaw phone htetNessuna valutazione finora
- Robotics Control and ApplicationDocumento8 pagineRobotics Control and ApplicationAman PatilNessuna valutazione finora
- Controlling Artificial Hand Using Smart Glove: International Journal of Applied Engineering Research April 2018Documento7 pagineControlling Artificial Hand Using Smart Glove: International Journal of Applied Engineering Research April 2018ali khanNessuna valutazione finora
- Position Control of 3-DOF Articulated Robot Arm Using PID ControllerDocumento7 paginePosition Control of 3-DOF Articulated Robot Arm Using PID ControllerJoker JkNessuna valutazione finora
- Development of Low Grade Robotic Arm For Small IndustriesDocumento12 pagineDevelopment of Low Grade Robotic Arm For Small IndustriesInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Static Structural Analysis of 4 Dof Telescopic Robotic ManipulatorDocumento6 pagineStatic Structural Analysis of 4 Dof Telescopic Robotic Manipulatoralagar krishna kumarNessuna valutazione finora
- Kinematic Modelling and Analysis of A 5 Axis Articulated Robot Arm Model VRT 502 IJERTV4IS070484 PDFDocumento5 pagineKinematic Modelling and Analysis of A 5 Axis Articulated Robot Arm Model VRT 502 IJERTV4IS070484 PDFAkib SheikhNessuna valutazione finora
- Design and Fabrication of 3-DOF Robot Arm Using Parallelogram MechanismsDocumento6 pagineDesign and Fabrication of 3-DOF Robot Arm Using Parallelogram MechanismsWARSE JournalsNessuna valutazione finora
- Part A Ans Key 1,2,4Documento3 paginePart A Ans Key 1,2,4VenkadeshNessuna valutazione finora
- 4213 11136 1 SM PDFDocumento4 pagine4213 11136 1 SM PDFGamini SureshNessuna valutazione finora
- 1 PBDocumento7 pagine1 PBFyndi Aw AwNessuna valutazione finora
- Robotic ArmDocumento6 pagineRobotic Armad1ad1ad1Nessuna valutazione finora
- Chap 3 Manufacturing ProcessDocumento117 pagineChap 3 Manufacturing Processtejasbamane64Nessuna valutazione finora
- Pick and Place ReviewDocumento9 paginePick and Place ReviewaditdharkarNessuna valutazione finora
- AN044 Robotic ArmDocumento9 pagineAN044 Robotic Armhussien amare100% (1)
- Wired Control Robotic ArmDocumento5 pagineWired Control Robotic Armjeevan kumarNessuna valutazione finora
- Robotic ArmDocumento9 pagineRobotic ArmRohit KumarNessuna valutazione finora
- Robotic Arm Dynamic and Simulation With Virtual Re PDFDocumento7 pagineRobotic Arm Dynamic and Simulation With Virtual Re PDFALA SOUISSINessuna valutazione finora
- Design of A Three Degrees of Freedom Robotic Arm: International Journal of Computer Applications April 2018Documento7 pagineDesign of A Three Degrees of Freedom Robotic Arm: International Journal of Computer Applications April 2018Gayathri BhatNessuna valutazione finora
- Ahmad Najib 135833 - Assigment (Part DR Wan) - Eem345 ManufactDocumento9 pagineAhmad Najib 135833 - Assigment (Part DR Wan) - Eem345 ManufactNajib HairiNessuna valutazione finora
- Design and Implementation of Cartesian RobotDocumento6 pagineDesign and Implementation of Cartesian RobotSang VũNessuna valutazione finora
- 2 DOF Articulated Pen PlotterDocumento19 pagine2 DOF Articulated Pen PlotterAnonymous JNquk43qNessuna valutazione finora
- Pipe Inspection RobotDocumento7 paginePipe Inspection RobotSharanabasappa SajjanNessuna valutazione finora
- EEE 1207 021 6 DOF Robotic Arm ManipulatorDocumento7 pagineEEE 1207 021 6 DOF Robotic Arm ManipulatorUNsha bee komNessuna valutazione finora
- Embedded Controller For Balancing Type Robot: Jakub Tutro, Krzysztof Wesołowski, Mariusz Pauluk, Dariusz MarchewkaDocumento6 pagineEmbedded Controller For Balancing Type Robot: Jakub Tutro, Krzysztof Wesołowski, Mariusz Pauluk, Dariusz MarchewkaGkkNessuna valutazione finora
- Conferencepaper 2Documento5 pagineConferencepaper 2Leo BoyNessuna valutazione finora
- Design Analysis of A Remote Controlled P PDFDocumento12 pagineDesign Analysis of A Remote Controlled P PDFVũ Mạnh CườngNessuna valutazione finora
- Simulation of Pick and Place Robotics System Using Solidworks SoftmotionDocumento7 pagineSimulation of Pick and Place Robotics System Using Solidworks SoftmotionSaumya SaxenaNessuna valutazione finora
- Design and Implementation of FPGA-Based Robotic Arm ManipulatorDocumento6 pagineDesign and Implementation of FPGA-Based Robotic Arm ManipulatorGraef Engenharia Projetos e AssessoriaNessuna valutazione finora
- Chapter 2Documento15 pagineChapter 2Aung ThikeNessuna valutazione finora
- Labview Based Four Dof Robotic Arm: September 2016Documento9 pagineLabview Based Four Dof Robotic Arm: September 2016Sony JuniantoNessuna valutazione finora
- Ijsred V5i3p21Documento11 pagineIjsred V5i3p21Samuel AbraghamNessuna valutazione finora
- Gesture Control of Robotic Arm: Institute of Research AdvancesDocumento9 pagineGesture Control of Robotic Arm: Institute of Research AdvancesaarthiNessuna valutazione finora
- Review On Design and Development of Robotic Arm Generation 1Documento3 pagineReview On Design and Development of Robotic Arm Generation 1International Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Real-Time Simulation of A Space Robotic ArmDocumento7 pagineReal-Time Simulation of A Space Robotic ArmAravind KumarNessuna valutazione finora
- Cim Module 4Documento21 pagineCim Module 4Shashank ShastriNessuna valutazione finora
- Robotics 1Documento24 pagineRobotics 1Rahul RoyNessuna valutazione finora
- Dynamic Modeling of Robotic Manipulators For Accuracy EvaluationDocumento7 pagineDynamic Modeling of Robotic Manipulators For Accuracy Evaluationyemane g.michalNessuna valutazione finora
- Fabrication & Controling of A Manipulator With Specific Coloured Object DetectionDocumento18 pagineFabrication & Controling of A Manipulator With Specific Coloured Object DetectionTusher Saha50% (8)
- Airo V1i 20Documento19 pagineAiro V1i 20Khoa NguyễnNessuna valutazione finora
- Analysis Industrial Robot Arm With Matlab and RoboAnalyzerDocumento6 pagineAnalysis Industrial Robot Arm With Matlab and RoboAnalyzerIjaems JournalNessuna valutazione finora
- 4 - Robot ProgrammingDocumento10 pagine4 - Robot Programmingkodasht.569005Nessuna valutazione finora
- Color Based 6 DOF Sorting Robot With Real-Time Object DetectionDocumento3 pagineColor Based 6 DOF Sorting Robot With Real-Time Object DetectionAli AzharNessuna valutazione finora
- Design and Development of A Robotic ArmDocumento4 pagineDesign and Development of A Robotic ArmNazmul Shikder RiyadhNessuna valutazione finora
- CinemáticaDocumento8 pagineCinemáticaibzan perezNessuna valutazione finora
- Robotic ArmDocumento22 pagineRobotic ArmEbru SayılganNessuna valutazione finora
- Kinematic Analysis of The Abb Irb 1520 Industrial Robot Using Roboanalyzer SoftwareDocumento10 pagineKinematic Analysis of The Abb Irb 1520 Industrial Robot Using Roboanalyzer SoftwareAbenezer bediluNessuna valutazione finora
- Teaching and Learning Robotic Arm Model: Kadirimangalam Jahnavi Sivraj PDocumento6 pagineTeaching and Learning Robotic Arm Model: Kadirimangalam Jahnavi Sivraj PCătălin PuțoiNessuna valutazione finora
- Study of Interactive Bike Simulator in Application PDFDocumento9 pagineStudy of Interactive Bike Simulator in Application PDFDIEGO ALEJANDRO PARRA GARRIDONessuna valutazione finora
- EEE 1207 021 6 DOF Robotic Arm ManipulatorDocumento7 pagineEEE 1207 021 6 DOF Robotic Arm ManipulatorCarlos Rodriguez RNessuna valutazione finora
- Study of Interactive Bike Simulator in Application of Virtual RealityDocumento9 pagineStudy of Interactive Bike Simulator in Application of Virtual RealitydiegoNessuna valutazione finora
- Ma11 4Documento6 pagineMa11 4이길현Nessuna valutazione finora
- AR - Module-3 Q & A (SEE)Documento7 pagineAR - Module-3 Q & A (SEE)Simply AkashNessuna valutazione finora
- RoboticsDocumento23 pagineRoboticsRahul Gupta50% (2)
- Planar Linkage Synthesis: A modern CAD based approachDa EverandPlanar Linkage Synthesis: A modern CAD based approachNessuna valutazione finora
- A New Design and Control of A Two-Wheel Self-Balancing Robot Using The Arduino MicrocontrollerDocumento6 pagineA New Design and Control of A Two-Wheel Self-Balancing Robot Using The Arduino Microcontrollerرشيد بن صغيرNessuna valutazione finora
- 63 May2020Documento7 pagine63 May2020AravindNessuna valutazione finora
- Movement Equations 2: Mathematical and Methodological SupplementsDa EverandMovement Equations 2: Mathematical and Methodological SupplementsNessuna valutazione finora
- Desalination by Using Alternative EnergyDocumento20 pagineDesalination by Using Alternative Energyalagar krishna kumarNessuna valutazione finora
- Overview of Solar DesalinationDocumento17 pagineOverview of Solar Desalinationalagar krishna kumarNessuna valutazione finora
- Mechatronics: Pushparaj Mani PathakDocumento36 pagineMechatronics: Pushparaj Mani Pathakalagar krishna kumarNessuna valutazione finora
- s17 PDFDocumento5 pagines17 PDFalagar krishna kumarNessuna valutazione finora
- Sciencedirect Sciencedirect SciencedirectDocumento4 pagineSciencedirect Sciencedirect Sciencedirectalagar krishna kumarNessuna valutazione finora
- Static Analysis of A 6 - Axis Industrial Robot Using Finite Element AnalysisDocumento7 pagineStatic Analysis of A 6 - Axis Industrial Robot Using Finite Element Analysisalagar krishna kumarNessuna valutazione finora
- A Vibration Analysis of A 6 Axis Industrial Robot Using Fea: SciencedirectDocumento8 pagineA Vibration Analysis of A 6 Axis Industrial Robot Using Fea: Sciencedirectalagar krishna kumarNessuna valutazione finora
- Writing Goals and Objectives GoalsDocumento2 pagineWriting Goals and Objectives Goalsalagar krishna kumarNessuna valutazione finora
- Unit 14 - Week 12: Assignment 12Documento5 pagineUnit 14 - Week 12: Assignment 12alagar krishna kumarNessuna valutazione finora
- Intro Robot Kinematics 5Documento25 pagineIntro Robot Kinematics 5Gnanesh PendliNessuna valutazione finora
- Stress TypesDocumento1 paginaStress Typesalagar krishna kumarNessuna valutazione finora
- Agreement Gold LoanDocumento4 pagineAgreement Gold Loanalagar krishna kumarNessuna valutazione finora
- Understanding Volume Kinetics: Robert G. HahnDocumento9 pagineUnderstanding Volume Kinetics: Robert G. Hahnalagar krishna kumarNessuna valutazione finora
- Life QuotesDocumento2 pagineLife Quotesalagar krishna kumarNessuna valutazione finora
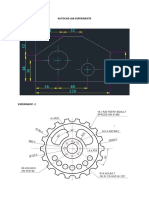
- Autocad Lab Experiments Experiment - 1Documento3 pagineAutocad Lab Experiments Experiment - 1alagar krishna kumarNessuna valutazione finora
- Fluid Mechanics Is A Branch of Science Which Deals With Fluids inDocumento6 pagineFluid Mechanics Is A Branch of Science Which Deals With Fluids inalagar krishna kumarNessuna valutazione finora
- EGD Diagrams1Documento3 pagineEGD Diagrams1alagar krishna kumarNessuna valutazione finora
- For Compressible Flow:: Displacement Thickness: It Is Denoted byDocumento1 paginaFor Compressible Flow:: Displacement Thickness: It Is Denoted byalagar krishna kumarNessuna valutazione finora
- Cat Electronic Technician 2018C v1.0 Product Status ReportDocumento6 pagineCat Electronic Technician 2018C v1.0 Product Status ReportRodolft Rodolft100% (1)
- Strassmayr Catalogue 2019Documento56 pagineStrassmayr Catalogue 2019SlVNessuna valutazione finora
- GATE Mechanical Resource PDFDocumento47 pagineGATE Mechanical Resource PDFAnkitNessuna valutazione finora
- Manual 110823 120c Cartoning MachineDocumento61 pagineManual 110823 120c Cartoning Machineandrea772100% (2)
- Turbomachinery-Hydraulic Machines ClassificationDocumento23 pagineTurbomachinery-Hydraulic Machines ClassificationAlaa MohamedNessuna valutazione finora
- Monarch 1000 ManualDocumento10 pagineMonarch 1000 ManualABRIL19Nessuna valutazione finora
- Technology and The Transformation of WorkDocumento22 pagineTechnology and The Transformation of WorkSuryateja MerguNessuna valutazione finora
- Workshop Manual: GB GBDocumento110 pagineWorkshop Manual: GB GBSelwinNessuna valutazione finora
- Mechanical 3-Roller Rolling Machine W11-12x3000Documento2 pagineMechanical 3-Roller Rolling Machine W11-12x3000EnriqueMiguelPriceNessuna valutazione finora
- Approved MBOA RE 17-18 - Items LIST PDFDocumento12 pagineApproved MBOA RE 17-18 - Items LIST PDFvenkateshbitraNessuna valutazione finora
- Smart Energy Harvesting Using Physical Exercising Machines: December 2016Documento8 pagineSmart Energy Harvesting Using Physical Exercising Machines: December 2016libin babyNessuna valutazione finora
- NCStudio CNC Router ManualV4.4Documento31 pagineNCStudio CNC Router ManualV4.4pejic1722Nessuna valutazione finora
- Abstract:: Modal Analysis of Sandvik PDJN/L Cutting ToolDocumento9 pagineAbstract:: Modal Analysis of Sandvik PDJN/L Cutting ToolranjithkrajNessuna valutazione finora
- 1 Pmoczko Et Al PDFDocumento8 pagine1 Pmoczko Et Al PDFrobson2015Nessuna valutazione finora
- 01 Cadfil - NC - Controller - RequirementsDocumento3 pagine01 Cadfil - NC - Controller - RequirementsHuber AlvaradoNessuna valutazione finora
- A Report On Compliant MechanismsDocumento22 pagineA Report On Compliant MechanismsRajesh Shyamrao KajeNessuna valutazione finora
- As 1473.3-2001 Wood Processing Machinery - Safety Finishing Machinery - Circular Sawing MachinesDocumento8 pagineAs 1473.3-2001 Wood Processing Machinery - Safety Finishing Machinery - Circular Sawing MachinesSAI Global - APACNessuna valutazione finora
- Mitho Steam Wash ManualDocumento28 pagineMitho Steam Wash ManualedgarcooNessuna valutazione finora
- TCVN 2737-1995-Loads and EffectsDocumento64 pagineTCVN 2737-1995-Loads and Effectsapi-3825219100% (2)
- Data 77Documento6 pagineData 77Abhijit BarmanNessuna valutazione finora
- YS-502D ManualDocumento31 pagineYS-502D ManualJeyson Castillo MenaNessuna valutazione finora
- Core Exper Es: Innovation & SolutionDocumento4 pagineCore Exper Es: Innovation & SolutionDaxesh PatelNessuna valutazione finora
- Chapter 1 - Brief Overview of Fluid PowerDocumento13 pagineChapter 1 - Brief Overview of Fluid PowerLuis JácomeNessuna valutazione finora
- DJM6113 Lab 1 Introduction of Robot BasisDocumento6 pagineDJM6113 Lab 1 Introduction of Robot BasisAmirul Naim50% (2)
- Unit 1Documento26 pagineUnit 1cymonitmawile27Nessuna valutazione finora
- MCQ With AnswersDocumento4 pagineMCQ With AnswersAkai OakNessuna valutazione finora
- 966G II Wheel Loader AXJ00001-UP (MACHINE) POWERED BY 3176 Engine (SEBP3279 - 63) - Document StructureDocumento12 pagine966G II Wheel Loader AXJ00001-UP (MACHINE) POWERED BY 3176 Engine (SEBP3279 - 63) - Document StructureRwan Marym100% (1)
- Feed Drive Simulator: Ryuta SatoDocumento2 pagineFeed Drive Simulator: Ryuta SatoAmazingTransNessuna valutazione finora
- AXIS Automatic Milling Manual - R1Documento40 pagineAXIS Automatic Milling Manual - R1vser19Nessuna valutazione finora
- Kollmorgen S700 Servo Drive S748... S772 Instruction ManualDocumento158 pagineKollmorgen S700 Servo Drive S748... S772 Instruction ManualSergio Isaac Lagos LagosNessuna valutazione finora