Potrebbero piacerti anche
- Cadernillo NXTDocumento19 pagineCadernillo NXTJAVIER ALONSO MURILLO MURILLONessuna valutazione finora
- Cuadernillo Programacion NXT - 2°rotacionDocumento21 pagineCuadernillo Programacion NXT - 2°rotacionpedrocarvilNessuna valutazione finora
- Tutorial de Programacion Lego Mindstorms NXT PDFDocumento70 pagineTutorial de Programacion Lego Mindstorms NXT PDFGilberto Cruz RuizNessuna valutazione finora
- Guia de Usua Rio LeoDocumento60 pagineGuia de Usua Rio LeoLuis GonzalezNessuna valutazione finora
- Guia de Laboratorio 1 2012-1Documento15 pagineGuia de Laboratorio 1 2012-1Manuel SaavedraNessuna valutazione finora
- Robotic ADocumento80 pagineRobotic Amquiroga100% (2)
- NXT 2.0Documento23 pagineNXT 2.0cristian echeverryNessuna valutazione finora
- About NXT BrickDocumento3 pagineAbout NXT BrickRonald Castillo PintoNessuna valutazione finora
- NXT - Guia RapidaDocumento14 pagineNXT - Guia RapidaLautroNessuna valutazione finora
- Taller LEGO WeDo PDFDocumento33 pagineTaller LEGO WeDo PDFpablogerman2100% (1)
- Robotica para PrincipiantesDocumento28 pagineRobotica para Principiantescirilo perez nicolasNessuna valutazione finora
- FichasDocumento21 pagineFichasdiego bautista piccoNessuna valutazione finora
- Programacion de Robots Lego Con LabVIEWDocumento44 pagineProgramacion de Robots Lego Con LabVIEWAlejandroNessuna valutazione finora
- Retos LEGO MINDSTORMS 2 - Mando A DistanciaDocumento28 pagineRetos LEGO MINDSTORMS 2 - Mando A DistanciaKoldo100% (1)
- 05 ArduinoDocumento18 pagine05 ArduinoMiguel Burriel IgeaNessuna valutazione finora
- Informe - 2 Led Con Un Boton PulsadorDocumento5 pagineInforme - 2 Led Con Un Boton PulsadorFERNANDANessuna valutazione finora
- Guia de Laboratorio 2 2012-2Documento17 pagineGuia de Laboratorio 2 2012-2Manuel SaavedraNessuna valutazione finora
- Circuitos de Arduino en ResidenciaDocumento6 pagineCircuitos de Arduino en Residenciaerik juarezNessuna valutazione finora
- Robótica 2Documento14 pagineRobótica 2Chelo CarrionNessuna valutazione finora
- Introduccion A La Programacion Lab 12Documento60 pagineIntroduccion A La Programacion Lab 12Jorge Alberto De La Cruz LopezNessuna valutazione finora
- Uso de Matlab y Simulink para El Control de Robots-PRESENTACIONDocumento58 pagineUso de Matlab y Simulink para El Control de Robots-PRESENTACIONreyes reyesNessuna valutazione finora
- Diseño de Un Robot Empleando LEGO MINDSTORMS NXT 2.0Documento6 pagineDiseño de Un Robot Empleando LEGO MINDSTORMS NXT 2.0Jaime De PazNessuna valutazione finora
- Reporte Practica 0 - Entradas y Salidas - Equipo 1Documento6 pagineReporte Practica 0 - Entradas y Salidas - Equipo 1DIEGO GUZMAN SEVILLANessuna valutazione finora
- Practica Dos SemaforoDocumento5 paginePractica Dos SemaforoSebastian FernandezNessuna valutazione finora
- Taller Programación de Arduino IDocumento6 pagineTaller Programación de Arduino Iolmar24Nessuna valutazione finora
- TripcticoDocumento3 pagineTripcticoGerardo LozanoNessuna valutazione finora
- TerceroDocumento82 pagineTerceroHectorMirelesMerchantNessuna valutazione finora
- Introduccion A Programacion Con Lego Mindstorm Ev3 PDFDocumento42 pagineIntroduccion A Programacion Con Lego Mindstorm Ev3 PDFMar242009Nessuna valutazione finora
- Recursos Del PIC. Uso de La Interrupción Externa Por RB0 - INTDocumento4 pagineRecursos Del PIC. Uso de La Interrupción Externa Por RB0 - INTValeria Cristina Gonzalez PachecoNessuna valutazione finora
- 1.1.2-Kit Robótica FreaduinoDocumento5 pagine1.1.2-Kit Robótica FreaduinoHenrry Alexis Orozco BoneNessuna valutazione finora
- Lab 12 - Crear Programas en Arduino (II)Documento27 pagineLab 12 - Crear Programas en Arduino (II)Franco VilcaNessuna valutazione finora
- El Robot Proton de ElektorDocumento3 pagineEl Robot Proton de ElektorMoisesNessuna valutazione finora
- Robo ProDocumento16 pagineRobo ProRoy Valens PresleyNessuna valutazione finora
- Prácticas Completas Con El Robot Irb-120Documento37 paginePrácticas Completas Con El Robot Irb-120lourenco.alexandre8836Nessuna valutazione finora
- Manual Probot Lab 2Documento50 pagineManual Probot Lab 2Solo Es Mejor ZomelyNessuna valutazione finora
- Práctica 01 Sistemas RoboticosDocumento2 paginePráctica 01 Sistemas RoboticosJair Delgadillo MuñozNessuna valutazione finora
- Daniel Urquijo 212020 149Documento17 pagineDaniel Urquijo 212020 149Daniel UrquijoNessuna valutazione finora
- Ilovepdf MergedDocumento15 pagineIlovepdf MergedKevin De la CruzNessuna valutazione finora
- Lego Mindstorm NXT Guia Rapida-ESDocumento14 pagineLego Mindstorm NXT Guia Rapida-ESEnrique MartinNessuna valutazione finora
- Laboratorio 15 - Uso de Librerías en Arduino para Salida de DatosDocumento11 pagineLaboratorio 15 - Uso de Librerías en Arduino para Salida de DatosRony ApazaNessuna valutazione finora
- Apuntes Mbot 3c2baeso BasicoDocumento4 pagineApuntes Mbot 3c2baeso Basiconorberto251287Nessuna valutazione finora
- Formato de Reporte de Actividad 3Documento6 pagineFormato de Reporte de Actividad 3Henry Huamani GalindoNessuna valutazione finora
- Reporte Practica 4 - RoboticaDocumento7 pagineReporte Practica 4 - RoboticaELISEO ORTEGA SANCHEZNessuna valutazione finora
- Práctica 1 Uso de Sensores Ultrasonico y TáctilDocumento4 paginePráctica 1 Uso de Sensores Ultrasonico y TáctilCesAr SoNessuna valutazione finora
- Inf 1 Elec 3Documento4 pagineInf 1 Elec 3Ronny GuevaraNessuna valutazione finora
- Mini Robot LEGODocumento13 pagineMini Robot LEGObryner ramirezNessuna valutazione finora
- Laboratorio 14 - Vargas Delgado JoaquinDocumento19 pagineLaboratorio 14 - Vargas Delgado Joaquinjoaquin vargasNessuna valutazione finora
- Formato de Reporte de Actividad 3Documento7 pagineFormato de Reporte de Actividad 3Tädäshi ÇçünöNessuna valutazione finora
- Arranque de Dos Motores Con Secuencia de Arranque Temporizado.Documento11 pagineArranque de Dos Motores Con Secuencia de Arranque Temporizado.JMF ES LO QUE HAYNessuna valutazione finora
- Taller 2 Descripcion Del Equipo de Los Kit de RoboticaDocumento5 pagineTaller 2 Descripcion Del Equipo de Los Kit de Roboticaharold camilo lozano mendezNessuna valutazione finora
- Primeros Pasos en NipleDocumento16 paginePrimeros Pasos en NipleJose BiaforeNessuna valutazione finora
- InfoPLC Net TutoSysmacStudio v1 BinariiDocumento31 pagineInfoPLC Net TutoSysmacStudio v1 BinariifaspNessuna valutazione finora
- Programación de Una Alarma Sencilla: EstudianteDocumento5 pagineProgramación de Una Alarma Sencilla: EstudianteJose DomínguezNessuna valutazione finora
- Cronometro Digital Con PsoCDocumento4 pagineCronometro Digital Con PsoCSEBASTIAN DAVID PINTOR AHUMADANessuna valutazione finora
- Brazo Robotico Controlado Por Un JoystickDocumento7 pagineBrazo Robotico Controlado Por Un JoystickJhonathan AsadovayNessuna valutazione finora
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeDa EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeNessuna valutazione finora
- Taller de Arduino. Experimentando con Arduino MKR 1010Da EverandTaller de Arduino. Experimentando con Arduino MKR 1010Nessuna valutazione finora
- Instalación y configuración de periféricos microinformáticos. IFCT0309Da EverandInstalación y configuración de periféricos microinformáticos. IFCT0309Nessuna valutazione finora
- Trabajo 3 - Aspectos Administrativos y Legales PDFDocumento10 pagineTrabajo 3 - Aspectos Administrativos y Legales PDFknightfelix12Nessuna valutazione finora
- Medidas Nordex PLANTILLADocumento2 pagineMedidas Nordex PLANTILLAknightfelix12Nessuna valutazione finora
- Malla Curricular Maestria FiqtDocumento1 paginaMalla Curricular Maestria Fiqtknightfelix12Nessuna valutazione finora
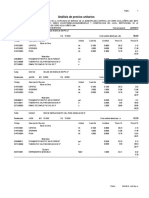
- Calculo de Procesos IDocumento3 pagineCalculo de Procesos Iknightfelix12Nessuna valutazione finora
- SCE ES 010-020 R1209 S7-1200 BausteineDocumento40 pagineSCE ES 010-020 R1209 S7-1200 Bausteineknightfelix12100% (1)
- Formato Igafom No Metalica PreventivoDocumento76 pagineFormato Igafom No Metalica PreventivoMonica Karina Arpe CalluchiNessuna valutazione finora
- Proyecto de Emprendimiento 3H Página Web CosméticosfnlDocumento16 pagineProyecto de Emprendimiento 3H Página Web Cosméticosfnlalam beltranNessuna valutazione finora
- Evaluación Sumativa 2Documento11 pagineEvaluación Sumativa 2ximenaNessuna valutazione finora
- ACTIVIDADES CENTENAS Milo y Roco SepDocumento4 pagineACTIVIDADES CENTENAS Milo y Roco SepEfraín EduardoNessuna valutazione finora
- Ensayo de Tratamientos Térmicos-1Documento30 pagineEnsayo de Tratamientos Térmicos-1MEIER JOSUE QUILLAHUAMAN HUAMANNessuna valutazione finora
- Matriz de Aspectos e Impactos AmbientalesDocumento12 pagineMatriz de Aspectos e Impactos AmbientalesIsrael Soto EscorciaNessuna valutazione finora
- Justificación Del Uso Del Cuaderno para 3 A PreescolarDocumento5 pagineJustificación Del Uso Del Cuaderno para 3 A PreescolarCaro Maya100% (1)
- 06.03 Instalaciones SanitariasDocumento9 pagine06.03 Instalaciones SanitariasCarlos Alberto Gago CuevaNessuna valutazione finora
- Ciencia y MItología-SednaDocumento8 pagineCiencia y MItología-SednaManuel Susarte RogelNessuna valutazione finora
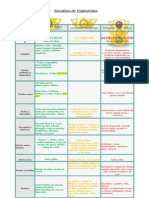
- 3 CriptografIADocumento60 pagine3 CriptografIAmartha leonNessuna valutazione finora
- Guia+de+Uso+Kraken+v2 2Documento6 pagineGuia+de+Uso+Kraken+v2 2Alex ParedesNessuna valutazione finora
- Captura de Pantalla 2023-10-24 A La(s) 2.27.36 A.M.Documento1 paginaCaptura de Pantalla 2023-10-24 A La(s) 2.27.36 A.M.kenneth.velasquez922Nessuna valutazione finora
- YPFB Negocia Otra Adenda de Venta de Gas A ArgentinaDocumento2 pagineYPFB Negocia Otra Adenda de Venta de Gas A ArgentinaDIEGONessuna valutazione finora
- Mapa Mental 210Documento1 paginaMapa Mental 210Jessica HernándezNessuna valutazione finora
- Alvarado Arlette HPE101 9544Documento2 pagineAlvarado Arlette HPE101 9544Arlette Alvarado MoralesNessuna valutazione finora
- Ejercicio de Propiedad Planta y EquipoDocumento2 pagineEjercicio de Propiedad Planta y EquipoKarina Casa100% (1)
- Análisis de Mercado Grupo AlseaDocumento19 pagineAnálisis de Mercado Grupo AlseaAle CalderónNessuna valutazione finora
- Sonido Escenico Excerpt 2paginasDocumento9 pagineSonido Escenico Excerpt 2paginasMayra SanchezNessuna valutazione finora
- Factura Electrónica de Venta: CCP-4717836: Angie Lorena Trujillo // William Smith 050031-MEDELLIN, ANTDocumento1 paginaFactura Electrónica de Venta: CCP-4717836: Angie Lorena Trujillo // William Smith 050031-MEDELLIN, ANTlina velezNessuna valutazione finora
- Musica A Finales Del XIX y Principios Del XXDocumento3 pagineMusica A Finales Del XIX y Principios Del XXasdfghjklkjhgfdsNessuna valutazione finora
- Mem. Descrip. Carretera1Documento28 pagineMem. Descrip. Carretera1Nathaly Sandra ChoqueNessuna valutazione finora
- Presentacion - CO2 Roberto - PeixotoDocumento34 paginePresentacion - CO2 Roberto - PeixotoRidel RamosNessuna valutazione finora
- Padilla, Miguel M. S/ Inconstitucionalidad Del Art. 2 de La Ley 23.298 (2001)Documento2 paginePadilla, Miguel M. S/ Inconstitucionalidad Del Art. 2 de La Ley 23.298 (2001)Facundo Martin ChiuffoNessuna valutazione finora
- Plantas Utiles de BailadoresDocumento27 paginePlantas Utiles de Bailadoresveliger2009Nessuna valutazione finora
- PRACTICA - Unidad 2. Software de Simulación-V2Documento9 paginePRACTICA - Unidad 2. Software de Simulación-V2Jonathan Pompeyo RamirezNessuna valutazione finora
- Estudio de Calidad Croquetas para PerrosDocumento23 pagineEstudio de Calidad Croquetas para PerrosIsidro MuñizNessuna valutazione finora
- Directrices Creacion y Fortalecimiento Bpdepartamentales - 0Documento22 pagineDirectrices Creacion y Fortalecimiento Bpdepartamentales - 0santyNessuna valutazione finora
- Semaforo Hipertrigliceridemia (1) ChequeadaDocumento2 pagineSemaforo Hipertrigliceridemia (1) ChequeadaMarcela AdasmeNessuna valutazione finora
- LerviaDocumento74 pagineLerviaEnrique ArribasNessuna valutazione finora
- Fase 1 06 Gastritis, Ulcera Peptica, Zollinger EllisonDocumento39 pagineFase 1 06 Gastritis, Ulcera Peptica, Zollinger Ellisonchuck MNessuna valutazione finora