Potrebbero piacerti anche
- S M Knot M KG R: Spoilers PBCF Duct, GVW Spoiler System PBCF of A PropellerDocumento8 pagineS M Knot M KG R: Spoilers PBCF Duct, GVW Spoiler System PBCF of A PropelleraminNessuna valutazione finora
- 6 (System & Control Volume-1)Documento34 pagine6 (System & Control Volume-1)Amir JoonNessuna valutazione finora
- Doan DTCSDocumento13 pagineDoan DTCSapi-3854754Nessuna valutazione finora
- C2.bo Chinh Luu 04Documento16 pagineC2.bo Chinh Luu 04Hieu PhamNessuna valutazione finora
- CH NG 2: Thiõt Kõ M CH Lùc I S ®Å V Nguy N Lý Ho T ®éng:: HH MaxDocumento28 pagineCH NG 2: Thiõt Kõ M CH Lùc I S ®Å V Nguy N Lý Ho T ®éng:: HH MaxNguoiCoDonNessuna valutazione finora
- A L702 Service G Uid E: RviceDocumento26 pagineA L702 Service G Uid E: RvicePIOTR VALENTINENessuna valutazione finora
- Thiõt Kõ Hö Dén ®éng B NG T I: SV Thùc Hiön: Æng Hång Chuy N GV H Íng Dén: Nguyôn H I S NDocumento41 pagineThiõt Kõ Hö Dén ®éng B NG T I: SV Thùc Hiön: Æng Hång Chuy N GV H Íng Dén: Nguyôn H I S Nlevantien93Nessuna valutazione finora
- n (b) u u −1) u −1) u t) + 2 sin (ω t) , < ω < π u uDocumento2 paginen (b) u u −1) u −1) u t) + 2 sin (ω t) , < ω < π u uAmir Mahmoud Mahdavi AbhariNessuna valutazione finora
- Synchronous Generator ParameterDocumento8 pagineSynchronous Generator ParameterAnonymous BBX2E87aHNessuna valutazione finora
- Prediction Control: Includes: Minimum Prediction ErrorDocumento14 paginePrediction Control: Includes: Minimum Prediction Errormousavi_yasharNessuna valutazione finora
- Stability Chapter4 Turbine Gov GridDocumento35 pagineStability Chapter4 Turbine Gov Gridmahdi.shahparastiNessuna valutazione finora
- 5 (Fluid Flow)Documento23 pagine5 (Fluid Flow)Amir JoonNessuna valutazione finora
- Regulated Power SuppliesDocumento26 pagineRegulated Power SuppliesเฮชวายนธNessuna valutazione finora
- BoKDCS Tan So Thap-9Documento10 pagineBoKDCS Tan So Thap-9tranngoc12345Nessuna valutazione finora
- VGGVDocumento32 pagineVGGVpoiuret isthisgoodNessuna valutazione finora
- Chapter 2.3 FEM For 2DDocumento100 pagineChapter 2.3 FEM For 2DSeyed Mahdi MousaviNessuna valutazione finora
- Pem, Eiv, IvDocumento2 paginePem, Eiv, IvAmir Mahmoud Mahdavi AbhariNessuna valutazione finora
- Design and Development of Quadrature Hybrid Coupler atDocumento40 pagineDesign and Development of Quadrature Hybrid Coupler atBv Raj GopalNessuna valutazione finora
- 1st IOAA 2007Documento4 pagine1st IOAA 2007arreeNessuna valutazione finora
- Current Sensor Fault Detection by Bilinear Observer For A Doubly Fed Induction GeneratorDocumento6 pagineCurrent Sensor Fault Detection by Bilinear Observer For A Doubly Fed Induction Generatorkatiki216Nessuna valutazione finora
- Computer Organization and Architecture 10th Edition Stallings Solutions ManualDocumento32 pagineComputer Organization and Architecture 10th Edition Stallings Solutions Manualmitchellunderwooda4p4d100% (14)
- مقاله آنالیز تحلیلی و عددی تغییر شکل تخممرغی تونلهای دایرهای تحت بارهای لرزهای - آباکوسDocumento8 pagineمقاله آنالیز تحلیلی و عددی تغییر شکل تخممرغی تونلهای دایرهای تحت بارهای لرزهای - آباکوسErfanNessuna valutazione finora
- Synte 5401B001 PDFDocumento18 pagineSynte 5401B001 PDFMi CisneNessuna valutazione finora
- Non-Linear Controller Applied To Boost DC-DC ConvertersDocumento8 pagineNon-Linear Controller Applied To Boost DC-DC ConvertersC_hakan_CNessuna valutazione finora
- Fundamentals of Digital System DesignDocumento3 pagineFundamentals of Digital System DesignsubramanianNessuna valutazione finora
- 7 (System & Control Volume-2)Documento16 pagine7 (System & Control Volume-2)Amir JoonNessuna valutazione finora
- Chapter 4Documento17 pagineChapter 4plamss asawdNessuna valutazione finora
- Sa Lien T Features: Seriescs 310 0Documento2 pagineSa Lien T Features: Seriescs 310 0Vamsi Krishna ReddyNessuna valutazione finora
- Bao Cao HTDDocumento27 pagineBao Cao HTDĐông Võ ThanhNessuna valutazione finora
- Lecture7 Ee689 Eq Intro TxeqDocumento27 pagineLecture7 Ee689 Eq Intro TxeqdogudoguNessuna valutazione finora
- Matrix ConverterDocumento41 pagineMatrix ConverterHoài Nam100% (1)
- Computer Science Notes: Digital and Analogue Circuit DesignDocumento52 pagineComputer Science Notes: Digital and Analogue Circuit DesignMuhammedNessuna valutazione finora
- 00579Documento3 pagine00579imman46920Nessuna valutazione finora
- Gtu Diploma in Aeronautical 331103 Summer 2013Documento2 pagineGtu Diploma in Aeronautical 331103 Summer 2013doyofit948Nessuna valutazione finora
- Pid PDFDocumento2 paginePid PDFKalpesh YadavNessuna valutazione finora
- كيفية اختيار القاطع الحماية حسب الاكوادDocumento9 pagineكيفية اختيار القاطع الحماية حسب الاكوادAhmed AdelNessuna valutazione finora
- Safty FactorDocumento9 pagineSafty Factorمحمد مصطفيNessuna valutazione finora
- Microprocessor and Microcontroller Lab: Experiments PerformedDocumento51 pagineMicroprocessor and Microcontroller Lab: Experiments PerformedadityaNessuna valutazione finora
- Pic12f683 PWMDocumento7 paginePic12f683 PWMRodriguezserviciostecnico RodriguezNessuna valutazione finora
- طراحی ترانسفورماتور (PowerEn.ir)Documento105 pagineطراحی ترانسفورماتور (PowerEn.ir)altaiNessuna valutazione finora
- Online Control of SVC Using ANN Based Pole Placement ApproachDocumento5 pagineOnline Control of SVC Using ANN Based Pole Placement ApproachAbdo AliNessuna valutazione finora
- PC Devoir2 tr1 2012 2013Documento4 paginePC Devoir2 tr1 2012 2013عبدالرزاق اغزيلNessuna valutazione finora
- A Proposed Method For Processing Unbalanced Conditions and DC Offset Currents in Transient Stability AnalysisDocumento6 pagineA Proposed Method For Processing Unbalanced Conditions and DC Offset Currents in Transient Stability AnalysisRafaelo09Nessuna valutazione finora
- Step-By-Step Design of The Digital Closed Loop System of The Boost Voltage ConverterDocumento6 pagineStep-By-Step Design of The Digital Closed Loop System of The Boost Voltage ConverterAMIR SOHAILNessuna valutazione finora
- DC-DC Boost Converter Control SystemDocumento3 pagineDC-DC Boost Converter Control SystemYERSON DAVID ROZO GIRALDONessuna valutazione finora
- Reduction of Torque Ripple in DTC For Induction Motor Using Input-Output Feedback LinearizationDocumento13 pagineReduction of Torque Ripple in DTC For Induction Motor Using Input-Output Feedback LinearizationRajendra KumarNessuna valutazione finora
- Abdel G Awad 2014Documento5 pagineAbdel G Awad 2014Amanda SanNessuna valutazione finora
- Application Note Using WinSpice With Dsch35 v2Documento0 pagineApplication Note Using WinSpice With Dsch35 v2ammayi9845_930467904Nessuna valutazione finora
- User Manual For Electromagnetic Flowmeter Transmitter PCB BoardDocumento28 pagineUser Manual For Electromagnetic Flowmeter Transmitter PCB BoardBelos SahajiNessuna valutazione finora
- HT9200A/HT9200B DTMF Generators: FeaturesDocumento14 pagineHT9200A/HT9200B DTMF Generators: FeaturesNOTIS64Nessuna valutazione finora
- A Battery Charge and Discharge Device Using PID Genetic Algorithm Based On PWM RectifierDocumento4 pagineA Battery Charge and Discharge Device Using PID Genetic Algorithm Based On PWM RectifierAdi MulyadiNessuna valutazione finora
- Vector Controlled Reluctance Synchronous Motor Drives With Prescribed Closed-Loop Speed DynamicsDocumento16 pagineVector Controlled Reluctance Synchronous Motor Drives With Prescribed Closed-Loop Speed DynamicsNguyễn Đức QuậnNessuna valutazione finora
- Simulating A DC DC Boost Converter Using Matlab Part 2Documento13 pagineSimulating A DC DC Boost Converter Using Matlab Part 2electrotehnica0% (2)
- Unit 3 Choppers Part I FEDDocumento11 pagineUnit 3 Choppers Part I FEDHarish ChandraNessuna valutazione finora
- G4PC50Documento8 pagineG4PC50LidystonPeronNessuna valutazione finora
- PropertyDocumento4 paginePropertySeetha Lakshmi RNessuna valutazione finora
- Direct Torque Control For Induction Motor Using Fuzzy LogicDocumento8 pagineDirect Torque Control For Induction Motor Using Fuzzy LogicMuhammad UmarNessuna valutazione finora
- DAC0800/DAC0802 8-Bit Digital-to-Analog Converters: Features DescriptionDocumento21 pagineDAC0800/DAC0802 8-Bit Digital-to-Analog Converters: Features DescriptionRaul CruzNessuna valutazione finora
- 110 Semiconductor Projects for the Home ConstructorDa Everand110 Semiconductor Projects for the Home ConstructorValutazione: 4 su 5 stelle4/5 (1)
- Cover Letter Examples For Every Type of Job Seeker - The MuseDocumento14 pagineCover Letter Examples For Every Type of Job Seeker - The MuseJimmyNessuna valutazione finora
- Mabl Worksheet Starting and Scaling Functional Automated TestingDocumento23 pagineMabl Worksheet Starting and Scaling Functional Automated TestingktbalajiNessuna valutazione finora
- Autocad Plant 3d Productivity StudyDocumento45 pagineAutocad Plant 3d Productivity Studyaateka02Nessuna valutazione finora
- DVB-RCS NCR SPTDocumento8 pagineDVB-RCS NCR SPTMike millyNessuna valutazione finora
- Polyhouse Automation1Documento23 paginePolyhouse Automation1Chaitanya GajbhiyeNessuna valutazione finora
- ANNA Uni or Book FinalDocumento129 pagineANNA Uni or Book FinalKrishdeepu KDNessuna valutazione finora
- Concept of ERS in SAP MMDocumento9 pagineConcept of ERS in SAP MMARABINDA CHAKRAVARTYNessuna valutazione finora
- Mdbun SeriesDocumento24 pagineMdbun SeriesBeeNessuna valutazione finora
- 06-E-SAT Including Data Management and Use of ResultsDocumento53 pagine06-E-SAT Including Data Management and Use of ResultsRgen Al VillNessuna valutazione finora
- BEC Preliminary Practice File - : Answers and Marking GuidelinesDocumento1 paginaBEC Preliminary Practice File - : Answers and Marking GuidelinesErik MonteroNessuna valutazione finora
- Pre-Feasibility Study: A M I N G O N EDocumento25 paginePre-Feasibility Study: A M I N G O N ESULTANMEHBOOB0% (1)
- PKDocumento6 paginePKJoamoc More CervantesNessuna valutazione finora
- Multiple Design Patterns For Voice Over Ip (Voip) SecurityDocumento8 pagineMultiple Design Patterns For Voice Over Ip (Voip) Security'Pranata' WianaNessuna valutazione finora
- Pascal Ehimare,: Popm, AsmDocumento2 paginePascal Ehimare,: Popm, AsmharshNessuna valutazione finora
- CG AssignmentDocumento47 pagineCG AssignmentdddddhwNessuna valutazione finora
- Ip Profiling SytemDocumento72 pagineIp Profiling Sytemjohnraymart colasitoNessuna valutazione finora
- Sonora CA24R-T Cable HDTV ATSC 24db Amplifier Spec SheetDocumento2 pagineSonora CA24R-T Cable HDTV ATSC 24db Amplifier Spec SheetDavid WardNessuna valutazione finora
- 2.07 - FAM-Monitoring - v10x - LabDocumento24 pagine2.07 - FAM-Monitoring - v10x - LabExpertise DATANessuna valutazione finora
- SAMDocumento19 pagineSAMOnita Dwi AgustinNessuna valutazione finora
- Panasonic Pi hl1104xk Digital Video RecorderDocumento1 paginaPanasonic Pi hl1104xk Digital Video Recorderknown knownNessuna valutazione finora
- Cinimamachine TuteDocumento7 pagineCinimamachine TutegregoryNessuna valutazione finora
- Sentiment Analysis of Stock News Using NLTKDocumento6 pagineSentiment Analysis of Stock News Using NLTKVIVA-TECH IJRINessuna valutazione finora
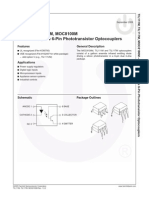
- TIL111M, TIL117M, MOC8100M General Purpose 6-Pin Phototransistor OptocouplersDocumento11 pagineTIL111M, TIL117M, MOC8100M General Purpose 6-Pin Phototransistor Optocouplersahm_adNessuna valutazione finora
- Variable DC Power Supply Project ReportDocumento10 pagineVariable DC Power Supply Project ReportEngr. Zeeshan mohsin73% (22)
- RevoU Case Study - EIRDocumento95 pagineRevoU Case Study - EIRSyechna FlohriantiNessuna valutazione finora
- Introduction To Operations Research 9Th Edition Hillier Solutions Manual Full Chapter PDFDocumento47 pagineIntroduction To Operations Research 9Th Edition Hillier Solutions Manual Full Chapter PDFchihungqo9td5100% (10)
- Senior Engineer SW AutosarDocumento2 pagineSenior Engineer SW AutosarDeepak Kumar RautNessuna valutazione finora
- 5000 Series Design GuideDocumento141 pagine5000 Series Design Guidebibhuti075100% (1)
- Elad FDM S-3: Yours To BuyDocumento66 pagineElad FDM S-3: Yours To BuyMaki MajomNessuna valutazione finora
- Sample DBDocumento21 pagineSample DBDinesh YepuruNessuna valutazione finora