Potrebbero piacerti anche
- New Methods For The Dynamic Analysis of Flexible Single-Input and Multi-Input Cam-Follower SystemsDocumento6 pagineNew Methods For The Dynamic Analysis of Flexible Single-Input and Multi-Input Cam-Follower SystemsVivekanandan_Sama012Nessuna valutazione finora
- 2023-Rafal-Analysis_of_a_Segmented_Axial_Active_Magnetic_Bearing_for_Multi-MWDocumento11 pagine2023-Rafal-Analysis_of_a_Segmented_Axial_Active_Magnetic_Bearing_for_Multi-MWAlex CooperNessuna valutazione finora
- Point MobilityDocumento10 paginePoint MobilityPadma JaNessuna valutazione finora
- Mechanical Systems and Signal Processing: Guillaume Puel, Be Atrice Bourgeteau, Denis AubryDocumento16 pagineMechanical Systems and Signal Processing: Guillaume Puel, Be Atrice Bourgeteau, Denis AubrySiswanto BudiNessuna valutazione finora
- ANSYS Version 10Documento6 pagineANSYS Version 10pankaj0983Nessuna valutazione finora
- Torsionalstiffness - Isma2010 - 0046Documento18 pagineTorsionalstiffness - Isma2010 - 0046Chandrashekar HiremathNessuna valutazione finora
- Lusas Implementation PDFDocumento20 pagineLusas Implementation PDFMuhamadHilmanPermanaNessuna valutazione finora
- Bsh2008 Non-Linear DynamicsDocumento6 pagineBsh2008 Non-Linear DynamicsFelipe MascayanoNessuna valutazione finora
- WCECS2010 pp949-954Documento6 pagineWCECS2010 pp949-954Yeamlak SisayNessuna valutazione finora
- Use and Benefits of Kinematics Inversion of Single Slider Mechanism A Review PaperDocumento5 pagineUse and Benefits of Kinematics Inversion of Single Slider Mechanism A Review PaperRockerss RockerssNessuna valutazione finora
- Art. AndreassonDocumento7 pagineArt. AndreassonENIC-AITCGNessuna valutazione finora
- Dynamic Model Identification For Industrial Robots: Ngoc Dung Vuong, Marcelo H. Ang JRDocumento18 pagineDynamic Model Identification For Industrial Robots: Ngoc Dung Vuong, Marcelo H. Ang JRCosorAndrei-AlexandruNessuna valutazione finora
- Friction JDSMCDocumento8 pagineFriction JDSMCVijay KumarNessuna valutazione finora
- MR Damper ThesisDocumento7 pagineMR Damper Thesisrqeygcugg100% (1)
- SAP2000 Analysis - Computers and Structures, IncDocumento6 pagineSAP2000 Analysis - Computers and Structures, IncshadabghazaliNessuna valutazione finora
- Optimization of Car Rim Using OptiStructDocumento6 pagineOptimization of Car Rim Using OptiStructsujaydsouza1987Nessuna valutazione finora
- Compliant ManipulatorsDocumento63 pagineCompliant Manipulators侯涛Nessuna valutazione finora
- IJREI - Fabrication and Analysis of Spring Testing MachineDocumento6 pagineIJREI - Fabrication and Analysis of Spring Testing MachineIjrei JournalNessuna valutazione finora
- Jjmie: Performance Analysis and Behaviour Characteristics of CVD (Semi Active) in Quarter Car ModelDocumento5 pagineJjmie: Performance Analysis and Behaviour Characteristics of CVD (Semi Active) in Quarter Car ModelGaby GhiuzanNessuna valutazione finora
- M Jayakumar Paper (17142691331)Documento12 pagineM Jayakumar Paper (17142691331)N V DhandapaniNessuna valutazione finora
- About The Preliminary Design of The Suspension SPRDocumento7 pagineAbout The Preliminary Design of The Suspension SPRalinNessuna valutazione finora
- Dynamic Simulation of Grinding ProcessesDocumento8 pagineDynamic Simulation of Grinding Processesmichelotti72Nessuna valutazione finora
- Determination of Damping Coefficient of Automotive Hydraulic Damper Using Sinusoidal TestingDocumento10 pagineDetermination of Damping Coefficient of Automotive Hydraulic Damper Using Sinusoidal TestingSourav Kumar SarangiNessuna valutazione finora
- Compliant 1Documento10 pagineCompliant 1rinki3253298Nessuna valutazione finora
- Rotor Dynamics of Aircraft Gas Turbine EnginesDocumento5 pagineRotor Dynamics of Aircraft Gas Turbine EnginesfengrotorNessuna valutazione finora
- 5.eng Design and Analysis of Helical Springs in Two Wheeler Suspension SystemDocumento14 pagine5.eng Design and Analysis of Helical Springs in Two Wheeler Suspension SystemImpact JournalsNessuna valutazione finora
- Technical Paper For Students and Young Engineers: - Fisita World Automotive Congress, Barcelona 2004Documento15 pagineTechnical Paper For Students and Young Engineers: - Fisita World Automotive Congress, Barcelona 2004rike.spNessuna valutazione finora
- Release Not Ese Tabs 2016 V 1600Documento21 pagineRelease Not Ese Tabs 2016 V 1600Ahmad FuqahaNessuna valutazione finora
- Damping CharacterizationDocumento21 pagineDamping CharacterizationsiritapeNessuna valutazione finora
- Nada ShabaanDocumento15 pagineNada ShabaanNada ShabanNessuna valutazione finora
- Fatigue simulation during vehicle designDocumento12 pagineFatigue simulation during vehicle designrajatNessuna valutazione finora
- Response Spectrum Analysis of Girder Bridges With Seismic Isolators Using Effective StiffnessDocumento10 pagineResponse Spectrum Analysis of Girder Bridges With Seismic Isolators Using Effective StiffnessJózsef SimonNessuna valutazione finora
- System Simulation of Belt ConveyorsDocumento9 pagineSystem Simulation of Belt Conveyorsharishkumar.ravichandranNessuna valutazione finora
- Suspension Paper 5Documento6 pagineSuspension Paper 5Rainier EstradaNessuna valutazione finora
- Improved Bushing Models For General Multibody Systems and Vehicle DynamicsDocumento25 pagineImproved Bushing Models For General Multibody Systems and Vehicle DynamicsAlfoilNessuna valutazione finora
- Stability Analysis With An NVH Minimal Model For BDocumento22 pagineStability Analysis With An NVH Minimal Model For Bdamienky.2024Nessuna valutazione finora
- Static Analysis of Spur Gear Using FEMDocumento6 pagineStatic Analysis of Spur Gear Using FEMSameOldHatNessuna valutazione finora
- #054 Rail Life Analysis and Its Use in Planning Track Mtce - Railway Tech Inter 1993Documento11 pagine#054 Rail Life Analysis and Its Use in Planning Track Mtce - Railway Tech Inter 1993Satryo Dwi SutrisnoNessuna valutazione finora
- Abaqus Fem Analysis of The Postbuckling Behaviour of Composite PDF E1094Documento4 pagineAbaqus Fem Analysis of The Postbuckling Behaviour of Composite PDF E1094FabricioNessuna valutazione finora
- Mikroniek - 2010 6 4Documento6 pagineMikroniek - 2010 6 4M.J.W.Nessuna valutazione finora
- Fatigue Life Prediction of Lower Suspension Arm Using Strain-Life ApproachDocumento15 pagineFatigue Life Prediction of Lower Suspension Arm Using Strain-Life Approachabraham silva hernandezNessuna valutazione finora
- ليث اشرف ابراهيم محمد HW.4Documento6 pagineليث اشرف ابراهيم محمد HW.4ليث كليبNessuna valutazione finora
- Advanced Computational Models of Elastomer Parts in Automotive TechnologyDocumento10 pagineAdvanced Computational Models of Elastomer Parts in Automotive Technologysuhas110Nessuna valutazione finora
- Durability Analysis From FEA Models Incorporating High Temperature and Creep EffectsDocumento15 pagineDurability Analysis From FEA Models Incorporating High Temperature and Creep Effectsklomps_jrNessuna valutazione finora
- Failure and Prospects of Modification in A Belt Conveyor SystemDocumento4 pagineFailure and Prospects of Modification in A Belt Conveyor SystemGogyNessuna valutazione finora
- Structiral Design Under Seismic Conditions UBC 97Documento17 pagineStructiral Design Under Seismic Conditions UBC 97desc82100% (1)
- Seismic Analysis Modeling To Satisfy Building CodesDocumento17 pagineSeismic Analysis Modeling To Satisfy Building CodesRaul Vilcherrez MendietaNessuna valutazione finora
- Optimization Using TOSCADocumento16 pagineOptimization Using TOSCAJunyan GuoNessuna valutazione finora
- Towards Rotordynamic Analysis With COMSOL Multiphysics Towards Rotordynamic Analysis With COMSOL MultiphysicsDocumento5 pagineTowards Rotordynamic Analysis With COMSOL Multiphysics Towards Rotordynamic Analysis With COMSOL MultiphysicsjaypallaNessuna valutazione finora
- Integrated Landing Gear System PDFDocumento14 pagineIntegrated Landing Gear System PDFMario Di PisaNessuna valutazione finora
- Analysis and Optimization of Engine Mounting Bracket: Monali Deshmukh, Prof. K R SontakkeDocumento6 pagineAnalysis and Optimization of Engine Mounting Bracket: Monali Deshmukh, Prof. K R SontakkehadiNessuna valutazione finora
- 8 Kamaland RahmanDocumento11 pagine8 Kamaland RahmanBinh NghiemNessuna valutazione finora
- 5 Izzuddin, DowlingDocumento10 pagine5 Izzuddin, Dowlingminhthanha6Nessuna valutazione finora
- Development of A CAE Method To Predict The Fatigue Life of Aluminium Panels Joined by Self Piercing RivetsDocumento7 pagineDevelopment of A CAE Method To Predict The Fatigue Life of Aluminium Panels Joined by Self Piercing RivetsAltairEnlightenNessuna valutazione finora
- Seismic Analysis Modeling To Satisfy Building CodesDocumento18 pagineSeismic Analysis Modeling To Satisfy Building CodesnagarajuNessuna valutazione finora
- Vehicle Collision Dynamics: Analysis and ReconstructionDa EverandVehicle Collision Dynamics: Analysis and ReconstructionNessuna valutazione finora
- Mathematical Analysis of Quasi-Simultaneous Laser Welding on PolymersDa EverandMathematical Analysis of Quasi-Simultaneous Laser Welding on PolymersNessuna valutazione finora
- Modeling and Dimensioning of Structures: An IntroductionDa EverandModeling and Dimensioning of Structures: An IntroductionNessuna valutazione finora
- Metal Fatigue Analysis Handbook: Practical Problem-solving Techniques for Computer-aided EngineeringDa EverandMetal Fatigue Analysis Handbook: Practical Problem-solving Techniques for Computer-aided EngineeringValutazione: 3.5 su 5 stelle3.5/5 (5)
- Multibody Simulation: The Jacobian Matrix (A Tool For Analysis)Documento19 pagineMultibody Simulation: The Jacobian Matrix (A Tool For Analysis)Anil KumarNessuna valutazione finora
- MSC - Adams TutorialDocumento17 pagineMSC - Adams Tutorialjuandpg0% (1)
- Inv PendDocumento46 pagineInv Pendhuzi132Nessuna valutazione finora
- Arai in Ais 080 2008 PDFDocumento12 pagineArai in Ais 080 2008 PDFAnil KumarNessuna valutazione finora
- Gate Question Papers MechanicalDocumento26 pagineGate Question Papers MechanicalRohu PaliwalNessuna valutazione finora
- Strength of Material-ME-ME (Gate2016.info) PDFDocumento186 pagineStrength of Material-ME-ME (Gate2016.info) PDFjayendrakashyap01Nessuna valutazione finora
- Finite Element Methods1 PDFDocumento12 pagineFinite Element Methods1 PDFAnil KumarNessuna valutazione finora
- Steer Angles, Ackerman and Tire Slip Angles PDFDocumento12 pagineSteer Angles, Ackerman and Tire Slip Angles PDFGeforceCudaNessuna valutazione finora
- Gate EngineeringDocumento4 pagineGate EngineeringAnil KumarNessuna valutazione finora
- Gate Me 1994 PDFDocumento5 pagineGate Me 1994 PDFAnil KumarNessuna valutazione finora
- Yamaha TT600RE Service ManualDocumento382 pagineYamaha TT600RE Service ManualStefan30393% (14)
- Curriculum Map Science 8 2023 2024Documento12 pagineCurriculum Map Science 8 2023 2024Gehan Lorefel Durante TibayNessuna valutazione finora
- 02 - AFT - Know Your Pump & System Curves - Part 2ADocumento8 pagine02 - AFT - Know Your Pump & System Curves - Part 2AAlfonso José García LagunaNessuna valutazione finora
- Product Information: Traffic Management AccessoryDocumento12 pagineProduct Information: Traffic Management AccessoryCORAL ALONSONessuna valutazione finora
- 2G - 4G Network Module - Data Sheet - EnglishDocumento8 pagine2G - 4G Network Module - Data Sheet - EnglishbbwroNessuna valutazione finora
- Assignment 1 Systems Analysis - EME5601Documento7 pagineAssignment 1 Systems Analysis - EME5601Travis GrantNessuna valutazione finora
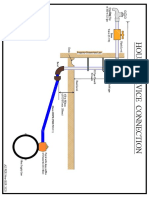
- House Service Connection NEW BSR 2020-1Documento1 paginaHouse Service Connection NEW BSR 2020-1Deshraj BairwaNessuna valutazione finora
- The Earls Sinful Quest - Lisa CampellDocumento148 pagineThe Earls Sinful Quest - Lisa CampellEirini DiamantopoulouNessuna valutazione finora
- Network FYPDocumento3 pagineNetwork FYPla tahzanNessuna valutazione finora
- Balance of Payment (BoP) Definition, Importance and ComponentsDocumento21 pagineBalance of Payment (BoP) Definition, Importance and ComponentsAnkita Sharma PandeyNessuna valutazione finora
- Experimental Validation of The BAC Factor Method For Lighting SystemsDocumento5 pagineExperimental Validation of The BAC Factor Method For Lighting SystemsJireh AngNessuna valutazione finora
- Qanooneislamorcu 00 JafaDocumento646 pagineQanooneislamorcu 00 JafaawNessuna valutazione finora
- Feasibility Analysis of ORC Systems for Flexible DesignDocumento227 pagineFeasibility Analysis of ORC Systems for Flexible DesignAwais SalmanNessuna valutazione finora
- Rom BlonDocumento8 pagineRom BlonCharlesJustin AyunonNessuna valutazione finora
- Improving MV Underground Cable Performance - Experience of TNB MalaysiaDocumento4 pagineImproving MV Underground Cable Performance - Experience of TNB Malaysialbk50Nessuna valutazione finora
- NPTEL Control Engineering Assignment 2 - SEO OptimizedDocumento4 pagineNPTEL Control Engineering Assignment 2 - SEO OptimizedGanesh RadharamNessuna valutazione finora
- Engagement & Akad PDFDocumento3 pagineEngagement & Akad PDFedputriNessuna valutazione finora
- Sony Ericsson K610i, K610m, and V630i Service ManualDocumento53 pagineSony Ericsson K610i, K610m, and V630i Service ManualJane TodoroskiNessuna valutazione finora
- User Manual ConsoleDocumento45 pagineUser Manual Consoledhana0809Nessuna valutazione finora
- 01 UM Nutrition Training PlanDocumento11 pagine01 UM Nutrition Training PlanJohn Leclair100% (2)
- Serospin Operating Manual 20100407Documento19 pagineSerospin Operating Manual 20100407Verdana50% (2)
- Sap MRP ConfigDocumento23 pagineSap MRP Configsharadapurv100% (1)
- DCT PIR insulation technical data sheetDocumento4 pagineDCT PIR insulation technical data sheetHenky MantophaniNessuna valutazione finora
- Solving Problems Involving Kinds of Propotion StudentDocumento18 pagineSolving Problems Involving Kinds of Propotion StudentJohn Daniel BerdosNessuna valutazione finora
- CBSE Class 11 English Sample Paper Set 5Documento8 pagineCBSE Class 11 English Sample Paper Set 5Shantam BasuNessuna valutazione finora
- Alimak AustraliancontractminingDocumento5 pagineAlimak AustraliancontractminingmanudemNessuna valutazione finora
- Assignment IDocumento2 pagineAssignment Ivaishnavi priyaNessuna valutazione finora
- Winbond Elec W25q128jvfiq c111478Documento75 pagineWinbond Elec W25q128jvfiq c111478Guilherme El KadriNessuna valutazione finora
- Baobawon Island Seafood Capital Bless Amare Sunrise Resort Sam Niza Beach Resort Oklahoma Island Rafis Resort Inday-Inday Beach ResortDocumento42 pagineBaobawon Island Seafood Capital Bless Amare Sunrise Resort Sam Niza Beach Resort Oklahoma Island Rafis Resort Inday-Inday Beach ResortAmber WilsonNessuna valutazione finora
- Laplace Transform AssignmentDocumento1 paginaLaplace Transform AssignmentMohamad DuhokiNessuna valutazione finora