Potrebbero piacerti anche
- Engineering and Scientific Computations Using MATLABDa EverandEngineering and Scientific Computations Using MATLABNessuna valutazione finora
- Passive CircuitsDocumento5 paginePassive CircuitsSn ProfNessuna valutazione finora
- Robot Mechanisms and Mechanical Devices IllustratedDa EverandRobot Mechanisms and Mechanical Devices IllustratedValutazione: 4 su 5 stelle4/5 (1)
- DS - Software Statex - BAUR - En-GbDocumento5 pagineDS - Software Statex - BAUR - En-GbEngineering CWSBNessuna valutazione finora
- Automotive Electronic Diagnostics (Course 2)Da EverandAutomotive Electronic Diagnostics (Course 2)Valutazione: 4 su 5 stelle4/5 (2)
- Azithromycin at Low Nanogram LevelsDocumento2 pagineAzithromycin at Low Nanogram LevelsDewi WulandhariNessuna valutazione finora
- Dunkels 07 DemoDocumento2 pagineDunkels 07 DemoEdwardNessuna valutazione finora
- Deblurring Text Images Via L - Regularized Intensity and Gradient PriorDocumento8 pagineDeblurring Text Images Via L - Regularized Intensity and Gradient PriorAsha simonNessuna valutazione finora
- Power System Voltage StabilityDocumento12 paginePower System Voltage Stabilitynoor almosawieNessuna valutazione finora
- C146 E251f PDFDocumento20 pagineC146 E251f PDFfmq04Nessuna valutazione finora
- Exp 6 Power SystDocumento4 pagineExp 6 Power Systasif karimNessuna valutazione finora
- LightLasYAG ProductBrochureDocumento6 pagineLightLasYAG ProductBrochureNayeliNessuna valutazione finora
- 2 N 2243 ADocumento1 pagina2 N 2243 AAhmed EL-arabyNessuna valutazione finora
- SST Numerical Criteria For HPLC PDFDocumento7 pagineSST Numerical Criteria For HPLC PDFRita Milagros Nieto MontesinosNessuna valutazione finora
- Instruction Manual: Multi-Smart MPPT Solar Charge ControllerDocumento12 pagineInstruction Manual: Multi-Smart MPPT Solar Charge ControllerMiguel Cayuela de PedroNessuna valutazione finora
- Anomaly Detection in Syncrophasor Data at PDC: Real Time Data Mining Techniques ForDocumento1 paginaAnomaly Detection in Syncrophasor Data at PDC: Real Time Data Mining Techniques ForOmer BallakNessuna valutazione finora
- Newpark 2022 PresentationDocumento32 pagineNewpark 2022 Presentationsarah96.alshawamikh100% (1)
- Probabilistic ModelsDocumento34 pagineProbabilistic Modelsareeb ahmadNessuna valutazione finora
- MRP SimulationDocumento4 pagineMRP Simulationramesh_amritaNessuna valutazione finora
- Cs-541 Wireless Sensor Networks: Lecture 4: Introduction To Signal Processing and Learning For WsnsDocumento40 pagineCs-541 Wireless Sensor Networks: Lecture 4: Introduction To Signal Processing and Learning For WsnsKumar SarthakNessuna valutazione finora
- CEA Grid Code Compliance Grid Code LVRT at Bus V25Documento1 paginaCEA Grid Code Compliance Grid Code LVRT at Bus V25Lavanya ChandranNessuna valutazione finora
- Using Nonlinear Kalman Filtering To Estimate SignalsDocumento12 pagineUsing Nonlinear Kalman Filtering To Estimate SignalskonyeinNessuna valutazione finora
- 22 StevensonDocumento60 pagine22 StevensongnanasekarNessuna valutazione finora
- ModellingRenewables PDFDocumento32 pagineModellingRenewables PDFpouyan HosseiniNessuna valutazione finora
- 5.1 Hardware and Software ConfigurationDocumento1 pagina5.1 Hardware and Software ConfigurationJohnNessuna valutazione finora
- ETHERNITY Token Economy WhitepaperDocumento5 pagineETHERNITY Token Economy WhitepaperAndrei ScripcariNessuna valutazione finora
- A Case For Vacuum Tubes: Xander Hendrik and Ruben JudocusDocumento3 pagineA Case For Vacuum Tubes: Xander Hendrik and Ruben JudocusJohnNessuna valutazione finora
- MDP Kit For The Preparation of Technetium Tc99m Medronate For Injection Diagnostic For Intravenous Use, RX OnlyDocumento2 pagineMDP Kit For The Preparation of Technetium Tc99m Medronate For Injection Diagnostic For Intravenous Use, RX OnlyacbgdvNessuna valutazione finora
- Battery Calculation For VESDA Laser Detectors: (C) 2003 Vision Fire and SecurityDocumento4 pagineBattery Calculation For VESDA Laser Detectors: (C) 2003 Vision Fire and SecurityHariNessuna valutazione finora
- 4.2 MeasurementDocumento36 pagine4.2 MeasurementphuongNessuna valutazione finora
- Battery Calculations For Fire Alarm and Signaling Systems - SFPEDocumento3 pagineBattery Calculations For Fire Alarm and Signaling Systems - SFPEUri BabaNessuna valutazione finora
- A Mathematical Perspective of Single-Channel Pseudo-Monopulse Tracking Receiver DesignDocumento2 pagineA Mathematical Perspective of Single-Channel Pseudo-Monopulse Tracking Receiver DesignjiyamanNessuna valutazione finora
- Monitoreo de Voltaje y CorrienteDocumento36 pagineMonitoreo de Voltaje y CorrienteMiguel Ángel Martínez MartínezNessuna valutazione finora
- Performance Report - Load Balancing - BrebesDocumento1 paginaPerformance Report - Load Balancing - Brebesodhi iskandarNessuna valutazione finora
- High-Availability Seamless Redundancy (HSR) Ethernet For Substation AutomationDocumento22 pagineHigh-Availability Seamless Redundancy (HSR) Ethernet For Substation Automationjacastillo68Nessuna valutazione finora
- Performance Monitoring For Mineral Processing: Success StoriesDocumento2 paginePerformance Monitoring For Mineral Processing: Success StoriesJessica LemosNessuna valutazione finora
- AsdaDocumento1 paginaAsdaShim ShimranNessuna valutazione finora
- Modules From The Field of Electrical Engineering and Information TechnologyDocumento8 pagineModules From The Field of Electrical Engineering and Information TechnologyNafees SiddiqueNessuna valutazione finora
- Exp-6 EiMDocumento3 pagineExp-6 EiMYASH KHARATNessuna valutazione finora
- Electric Vehicle Systems Engineering Training Brochure LIVE ONLINE B5Documento3 pagineElectric Vehicle Systems Engineering Training Brochure LIVE ONLINE B5Eng Peter TabboNessuna valutazione finora
- High-Friquency General-Purpose Amplifier Applications: Package Dimensions FeaturesDocumento5 pagineHigh-Friquency General-Purpose Amplifier Applications: Package Dimensions FeaturesArturo ArmuellesNessuna valutazione finora
- A Practical Investigation of A High Power Bidirectional ChargingDocumento7 pagineA Practical Investigation of A High Power Bidirectional ChargingPRAJWAL MagadiNessuna valutazione finora
- Practical Use of Straight Line TheoryDocumento8 paginePractical Use of Straight Line TheoryAidi FinawanNessuna valutazione finora
- Eio 2Documento20 pagineEio 2Krzyszto FPNessuna valutazione finora
- Direct Thermal Decomposition Mercury Analyzer With Extended Range Triple-Detectors Sequential Dual-Cells Optics For Pure PerformanceDocumento4 pagineDirect Thermal Decomposition Mercury Analyzer With Extended Range Triple-Detectors Sequential Dual-Cells Optics For Pure PerformanceXANPHOXYL KIBETNessuna valutazione finora
- Fire Extinguishing Drone SwarmDocumento3 pagineFire Extinguishing Drone SwarmUMERNessuna valutazione finora
- Protection IntDocumento6 pagineProtection IntMartin EvdokimovNessuna valutazione finora
- Solver: WIT Transactions On Modelling and Simulation, Vol 51, 0 2011 WIT Press, ISSN 1743-355X (On-Line)Documento1 paginaSolver: WIT Transactions On Modelling and Simulation, Vol 51, 0 2011 WIT Press, ISSN 1743-355X (On-Line)Ali SatriaNessuna valutazione finora
- td2014p 000736 PDFDocumento36 paginetd2014p 000736 PDFfoufou79Nessuna valutazione finora
- AMTED398078EN - Web 55Documento1 paginaAMTED398078EN - Web 55Hany ShaltootNessuna valutazione finora
- Scimakelatex 7371 XXXDocumento4 pagineScimakelatex 7371 XXXborlandspamNessuna valutazione finora
- TQM (Assignment 1&2)Documento5 pagineTQM (Assignment 1&2)sujay nayakNessuna valutazione finora
- Poster 1Documento1 paginaPoster 1YOUNES KASMINessuna valutazione finora
- Harmonic Treatment in Industrial PowerDocumento115 pagineHarmonic Treatment in Industrial PowerAbhishek MishraNessuna valutazione finora
- MECH3780 Fluid Mechanics 2 and CFD: Computation Fluid Dynamics (CFD) Lecture 6 - Evaluation of Numerical SolutionsDocumento12 pagineMECH3780 Fluid Mechanics 2 and CFD: Computation Fluid Dynamics (CFD) Lecture 6 - Evaluation of Numerical SolutionsninibearNessuna valutazione finora
- Modeling of A Continuous Stirred Tank Reactor Using AnnDocumento5 pagineModeling of A Continuous Stirred Tank Reactor Using AnnPetForest Ni JohannNessuna valutazione finora
- Summary Performance Carrier Aggregation ActivationDocumento1 paginaSummary Performance Carrier Aggregation Activationodhi iskandarNessuna valutazione finora
- Summary Performance Carrier Aggregation ActivationDocumento1 paginaSummary Performance Carrier Aggregation Activationodhi iskandarNessuna valutazione finora
- CSL01Documento7 pagineCSL01Mahnoor KhanNessuna valutazione finora
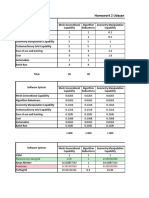
- Homework 2 Udayan Saxena 1: Numeca IGG-Autogrid 0.25 2 0.333333333Documento10 pagineHomework 2 Udayan Saxena 1: Numeca IGG-Autogrid 0.25 2 0.333333333Udayan SaxenaNessuna valutazione finora
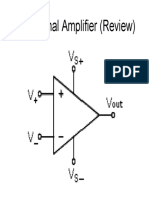
- Operational Amplifier (Review)Documento16 pagineOperational Amplifier (Review)Matheus FelicioNessuna valutazione finora
- Combined Wavelet Transform and Regression Technique For Secondary Current Compensation of Current TransformersDocumento7 pagineCombined Wavelet Transform and Regression Technique For Secondary Current Compensation of Current TransformersMatheus FelicioNessuna valutazione finora
- 22a qs001 - PT PDocumento50 pagine22a qs001 - PT PMatheus FelicioNessuna valutazione finora
- Coats 1963Documento19 pagineCoats 1963James TerryNessuna valutazione finora
- STP CivilDocumento25 pagineSTP CivilRK PROJECT CONSULTANTSNessuna valutazione finora
- SW 2.7 ReadmeDocumento4 pagineSW 2.7 Readmene0botNessuna valutazione finora
- LG P503 SVC Eng 101008Documento199 pagineLG P503 SVC Eng 101008MaxAllgeruNessuna valutazione finora
- General Thread: No Flavor Hard Math Bad ArtDocumento4 pagineGeneral Thread: No Flavor Hard Math Bad ArtAnonymous q9PRRY25% (4)
- Java - Android, FileOutputStream, ByteArrayInputStream, ByteArrayOutputStream.Documento27 pagineJava - Android, FileOutputStream, ByteArrayInputStream, ByteArrayOutputStream.Karan TrehanNessuna valutazione finora
- Lotus TravelerDocumento43 pagineLotus Travelersyedmn21Nessuna valutazione finora
- A Ground-Motion Transfer Function Matrix Between Two Nearby Rock and Soil Sites: A System Identification ProblemDocumento13 pagineA Ground-Motion Transfer Function Matrix Between Two Nearby Rock and Soil Sites: A System Identification ProblemRicardo Angelo Quispe MendizábalNessuna valutazione finora
- Twin Disc SP318IL BulletinDocumento2 pagineTwin Disc SP318IL BulletinAnonymous Kr13NEBNessuna valutazione finora
- Crusher House OperationDocumento21 pagineCrusher House Operationratan das0% (1)
- Major Architecture Forms From Arunachal PradeshDocumento7 pagineMajor Architecture Forms From Arunachal PradeshCharchil Saini100% (1)
- Over View API Spec 6aDocumento2 pagineOver View API Spec 6aAlejandro Garcia Fonseca100% (2)
- Royal 77Documento131 pagineRoyal 77victorNessuna valutazione finora
- You're Reading An Excerpt. Click Here To Read Official FURUNO MD-550 User GuideDocumento3 pagineYou're Reading An Excerpt. Click Here To Read Official FURUNO MD-550 User GuideSugeng HariadiNessuna valutazione finora
- AP Chemistry Bonding Help Sheet: 2, (Diamond)Documento6 pagineAP Chemistry Bonding Help Sheet: 2, (Diamond)Weiyu TongNessuna valutazione finora
- Linear Swell TestDocumento3 pagineLinear Swell TestAhmer AkhlaqueNessuna valutazione finora
- GR00005300 36Documento22 pagineGR00005300 36Luis David Leon GarciaNessuna valutazione finora
- MCR 308 PDFDocumento7 pagineMCR 308 PDFstudiostandardNessuna valutazione finora
- CommsII Problem Set 3 With AddendumDocumento2 pagineCommsII Problem Set 3 With AddendumMarlon BoucaudNessuna valutazione finora
- Week 1 Summative 1Documento7 pagineWeek 1 Summative 1Cherry Mae LaurenteNessuna valutazione finora
- Simplex 4100-0046Documento4 pagineSimplex 4100-0046vlaya1984Nessuna valutazione finora
- DocumentDocumento32 pagineDocumentmnasiriqbal786Nessuna valutazione finora
- Detailed EstimateDocumento6 pagineDetailed EstimatePamela Joanne Falo AndradeNessuna valutazione finora
- Proline T-Mass 65F, 65I: Technical InformationDocumento36 pagineProline T-Mass 65F, 65I: Technical InformationharisNessuna valutazione finora
- Lift CylindersDocumento14 pagineLift CylindersamineNessuna valutazione finora
- Module 3 - Loci of Points and Straight LinesDocumento41 pagineModule 3 - Loci of Points and Straight LinesEngr Fazal Akbar100% (3)
- 45 - 6575 - EE514 - 2011 - 1 - 2 - 1 - EE 514 Lec - 02Documento48 pagine45 - 6575 - EE514 - 2011 - 1 - 2 - 1 - EE 514 Lec - 02Laxmikant BagaleNessuna valutazione finora
- Single Girder Crane STD DetailsDocumento3 pagineSingle Girder Crane STD Detailsb sai gnanadepNessuna valutazione finora
- ProjectDocumento5 pagineProjectDeepak KesharwaniNessuna valutazione finora
- Repuestos TK30Documento108 pagineRepuestos TK30Juan Esteban GiraldoNessuna valutazione finora
- CCNA Certification Study Guide, Volume 2: Exam 200-301Da EverandCCNA Certification Study Guide, Volume 2: Exam 200-301Nessuna valutazione finora
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsDa EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsValutazione: 5 su 5 stelle5/5 (1)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsDa EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNessuna valutazione finora
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxDa EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxValutazione: 4.5 su 5 stelle4.5/5 (67)
- AWS Certified Solutions Architect Study Guide: Associate SAA-C01 ExamDa EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C01 ExamValutazione: 4 su 5 stelle4/5 (1)
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionDa EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionValutazione: 5 su 5 stelle5/5 (4)
- Hacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.Da EverandHacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.Valutazione: 5 su 5 stelle5/5 (2)
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationDa EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationValutazione: 5 su 5 stelle5/5 (2)
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamDa EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamValutazione: 5 su 5 stelle5/5 (1)
- Cybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityDa EverandCybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityValutazione: 5 su 5 stelle5/5 (2)
- Set Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNDa EverandSet Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNValutazione: 5 su 5 stelle5/5 (1)
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Da EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Valutazione: 4 su 5 stelle4/5 (4)
- Palo Alto Networks: The Ultimate Guide To Quickly Pass All The Exams And Getting Certified. Real Practice Test With Detailed Screenshots, Answers And ExplanationsDa EverandPalo Alto Networks: The Ultimate Guide To Quickly Pass All The Exams And Getting Certified. Real Practice Test With Detailed Screenshots, Answers And ExplanationsNessuna valutazione finora
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationDa EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationNessuna valutazione finora
- Unlock Any Roku Device: Watch Shows, TV, & Download AppsDa EverandUnlock Any Roku Device: Watch Shows, TV, & Download AppsNessuna valutazione finora
- Terraform for Developers: Essentials of Infrastructure Automation and ProvisioningDa EverandTerraform for Developers: Essentials of Infrastructure Automation and ProvisioningNessuna valutazione finora
- Networking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366Da EverandNetworking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366Nessuna valutazione finora
- Cybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringDa EverandCybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringValutazione: 5 su 5 stelle5/5 (40)
- An Introduction to SDN Intent Based NetworkingDa EverandAn Introduction to SDN Intent Based NetworkingValutazione: 5 su 5 stelle5/5 (1)