Potrebbero piacerti anche
- 4-Meaning and Types of utility-13-Dec-2019Material - II - 13-Dec-2019 - Types - Characteristics - of - UtilityDocumento9 pagine4-Meaning and Types of utility-13-Dec-2019Material - II - 13-Dec-2019 - Types - Characteristics - of - Utilitynayan agalNessuna valutazione finora
- 17-Price Elasticities and Measurement of Elasticity-10-Jan-2020Material - II - 10-Jan-2020 - Price - Elasticity - of - DemandDocumento9 pagine17-Price Elasticities and Measurement of Elasticity-10-Jan-2020Material - II - 10-Jan-2020 - Price - Elasticity - of - Demandnayan agalNessuna valutazione finora
- 12-Demand, Law of Demand and Factors Determinants of Demand-20-Dec-2019Material - V - 20-Dec-2019 - Indifference - Curve - AnalysisDocumento24 pagine12-Demand, Law of Demand and Factors Determinants of Demand-20-Dec-2019Material - V - 20-Dec-2019 - Indifference - Curve - Analysisnayan agalNessuna valutazione finora
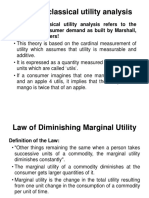
- 6-Law of Diminishing Marginal Utility-17-Dec-2019Material - I - 17-Dec-2019 - The - Law - of - Diminishing - Marginal - UtilityDocumento18 pagine6-Law of Diminishing Marginal Utility-17-Dec-2019Material - I - 17-Dec-2019 - The - Law - of - Diminishing - Marginal - Utilitynayan agalNessuna valutazione finora
- 9-SIGNAL FLOW GRAPH-2-07-Jan-2020Material - I - 07-Jan-2020 - Sig-Flo-Gra - 2Documento14 pagine9-SIGNAL FLOW GRAPH-2-07-Jan-2020Material - I - 07-Jan-2020 - Sig-Flo-Gra - 2nayan agalNessuna valutazione finora
- 10-Demand, Law of Demand and Factors Determinants of Demand-20-Dec-2019Material - III - 20-Dec-2019 - The - Law - of - DemandDocumento12 pagine10-Demand, Law of Demand and Factors Determinants of Demand-20-Dec-2019Material - III - 20-Dec-2019 - The - Law - of - Demandnayan agalNessuna valutazione finora
- ROM OrganisationDocumento2 pagineROM Organisationnayan agalNessuna valutazione finora
- Architecture of 8086Documento4 pagineArchitecture of 8086sree ramyaNessuna valutazione finora
- 19 DTFT 19 Sep 2018 - Reference Material I - Module 4Documento37 pagine19 DTFT 19 Sep 2018 - Reference Material I - Module 4nayan agalNessuna valutazione finora
- 5 Block Diagram - Manipulation of Block Diagrams 24 Jul 2019material - III - 24 Jul 2019 - Module 2 - Part 3Documento62 pagine5 Block Diagram - Manipulation of Block Diagrams 24 Jul 2019material - III - 24 Jul 2019 - Module 2 - Part 3nayan agalNessuna valutazione finora
- 23 Gate Level Modelling 10 Sep 2018reference Material I - GatelevelModelingDocumento9 pagine23 Gate Level Modelling 10 Sep 2018reference Material I - GatelevelModelingnayan agalNessuna valutazione finora
- Verilog Operators ManualDocumento27 pagineVerilog Operators Manualnik250890Nessuna valutazione finora
- 25 Data Flow Modelling 17 Sep 2018reference Material I - DataFlowModelingDocumento18 pagine25 Data Flow Modelling 17 Sep 2018reference Material I - DataFlowModelingnayan agalNessuna valutazione finora
- 26-Behavioral Modelling and Verilog Testbench-19-Sep-2018Reference Material I - Behavioral Modeling New - 18Documento17 pagine26-Behavioral Modelling and Verilog Testbench-19-Sep-2018Reference Material I - Behavioral Modeling New - 18nayan agalNessuna valutazione finora
- 15 Boolean Algebra 23 Jul 2018reference Material I - Boolean - AlgebraDocumento19 pagine15 Boolean Algebra 23 Jul 2018reference Material I - Boolean - Algebranayan agalNessuna valutazione finora
- 20-Combinational Logic Design-27-Aug-2018Reference Material II - Combinational Logic DesignDocumento48 pagine20-Combinational Logic Design-27-Aug-2018Reference Material II - Combinational Logic Designnayan agalNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Signals and Systems Booklet (124 Pages)Documento124 pagineSignals and Systems Booklet (124 Pages)koustubha sriNessuna valutazione finora
- Digital Filter DesignDocumento31 pagineDigital Filter DesignSurafel TadesseNessuna valutazione finora
- DSP Lab 1 - 03Documento63 pagineDSP Lab 1 - 03Abdul BasitNessuna valutazione finora
- S4ND: Modeling Images and Videos As Multidimensional Signals Using State SpacesDocumento22 pagineS4ND: Modeling Images and Videos As Multidimensional Signals Using State SpacesNikola ZubicNessuna valutazione finora
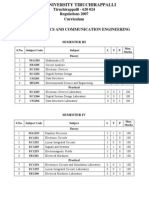
- B E ECE-SYLLABUS pdf2-07Documento87 pagineB E ECE-SYLLABUS pdf2-07SAMIARANTHANGINessuna valutazione finora
- Basic Control Systems EngineeringDocumento457 pagineBasic Control Systems EngineeringBinh Le Khac82% (17)
- Course FileDocumento254 pagineCourse FileBasheer NajemNessuna valutazione finora
- Modeling in Time DomainDocumento30 pagineModeling in Time Domainfarouq_razzaz2574Nessuna valutazione finora
- Lecture-13 Fourier Series Introduction (Eigen Function and Frequency Response)Documento23 pagineLecture-13 Fourier Series Introduction (Eigen Function and Frequency Response)The LifeNessuna valutazione finora
- 03 Midterm Answer DSP Spring 2017Documento9 pagine03 Midterm Answer DSP Spring 2017Alaa FaroukNessuna valutazione finora
- FT GT F GT D FT G D: AsteriskDocumento22 pagineFT GT F GT D FT G D: Asterisk174A1 HindupriyaNessuna valutazione finora
- DSP All Mcq'sDocumento46 pagineDSP All Mcq'sSamara Reddy (RA1611004010204)50% (4)
- GaddaDocumento119 pagineGaddaMurthyNessuna valutazione finora
- Chapter Two Discrete-Time Signals and Systems: Kiot, School of Electrical and Computer EngineeringDocumento25 pagineChapter Two Discrete-Time Signals and Systems: Kiot, School of Electrical and Computer EngineeringSol kassaNessuna valutazione finora
- ANSYS Maxwell Automation and Customization: Application BriefDocumento48 pagineANSYS Maxwell Automation and Customization: Application BriefVishalNessuna valutazione finora
- Experiment 4: To Perform Convolution in MATLABDocumento5 pagineExperiment 4: To Perform Convolution in MATLABMohsin RazaNessuna valutazione finora
- Convolution and Correlation - TutorialspointDocumento12 pagineConvolution and Correlation - TutorialspointSavita BhosleNessuna valutazione finora
- SYLLABUSDocumento125 pagineSYLLABUSRAPETI SAI KUMAR (N160490)Nessuna valutazione finora
- DSP SlidesDocumento261 pagineDSP SlidesJoel NietoNessuna valutazione finora
- Power & Energy Signals Questions and Answers - SanfoundryDocumento11 paginePower & Energy Signals Questions and Answers - SanfoundrykshambelmekuyeNessuna valutazione finora
- Fourier TransformDocumento13 pagineFourier Transformtiktiktak100% (1)
- Signals and Systems: 18EC45 Model Question Paper-2 With Effect From 2019-20 (CBCS Scheme)Documento3 pagineSignals and Systems: 18EC45 Model Question Paper-2 With Effect From 2019-20 (CBCS Scheme)siddhu 2002Nessuna valutazione finora
- Signals and Systems HW Solutions Fall 2015 Chapters 1-4Documento44 pagineSignals and Systems HW Solutions Fall 2015 Chapters 1-4nikhilharsha07Nessuna valutazione finora
- Sampling TheoremDocumento92 pagineSampling TheoremvijaybabukoreboinaNessuna valutazione finora
- LCS ProjectDocumento15 pagineLCS Projectname choroNessuna valutazione finora
- QFT ManualDocumento148 pagineQFT ManualMj Tichy HNessuna valutazione finora
- Natural Response Neither Grows Nor Approaches Zero As Time (ForDocumento9 pagineNatural Response Neither Grows Nor Approaches Zero As Time (ForAditya PrakashNessuna valutazione finora
- 07a4ec19 Signals and SystemsDocumento9 pagine07a4ec19 Signals and SystemsSRINIVASA RAO GANTANessuna valutazione finora
- Unit Step FunctionDocumento15 pagineUnit Step FunctionanaNessuna valutazione finora
- Chapter 3 SlidesDocumento69 pagineChapter 3 SlidesMelfini TambaNessuna valutazione finora