Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Brittney Gilliam, Et Al., v. City of Aurora, Et Al.Documento42 pagineBrittney Gilliam, Et Al., v. City of Aurora, Et Al.Michael_Roberts2019Nessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Completing-Your-Copy-With-Captions-And-Headlines Lesson-1Documento24 pagineCompleting-Your-Copy-With-Captions-And-Headlines Lesson-1api-294176103Nessuna valutazione finora
- FIRE Protection Engineering Winter 2002Documento64 pagineFIRE Protection Engineering Winter 2002Hany RifaatNessuna valutazione finora
- Operations Management Success FactorsDocumento147 pagineOperations Management Success Factorsabishakekoul100% (1)
- George F Kennan and The Birth of Containment The Greek Test CaseDocumento17 pagineGeorge F Kennan and The Birth of Containment The Greek Test CaseEllinikos Emfilios100% (1)
- Sons and Lovers AuthorDocumento9 pagineSons and Lovers AuthorArmen NeziriNessuna valutazione finora
- A Case Study On Implementing ITIL in Bus PDFDocumento7 pagineA Case Study On Implementing ITIL in Bus PDFsayeeNessuna valutazione finora
- Energy Management of Hybrid MicrogridDocumento5 pagineEnergy Management of Hybrid MicrogridWilson TanNessuna valutazione finora
- Energy Efficiency of Lithium-Ion Battery Used As Energy Storage Devices in Micro-GridDocumento6 pagineEnergy Efficiency of Lithium-Ion Battery Used As Energy Storage Devices in Micro-GridWilson TanNessuna valutazione finora
- State Space AnalysisDocumento26 pagineState Space AnalysisWilson TanNessuna valutazione finora
- Discrete-Time Finite Horizon PDFDocumento32 pagineDiscrete-Time Finite Horizon PDFRoy GaolNessuna valutazione finora
- The Harvard System of ReferencingDocumento12 pagineThe Harvard System of ReferencingDucNessuna valutazione finora
- The Importance of Communicating in Coalition Warfare PT 1Documento3 pagineThe Importance of Communicating in Coalition Warfare PT 1Wilson TanNessuna valutazione finora
- Earth-Song WorksheetDocumento2 pagineEarth-Song WorksheetMuhammad FarizNessuna valutazione finora
- Ocimum Species Ethnomedicinal Uses, Phytochemistry and Pharmacological ImportanceDocumento13 pagineOcimum Species Ethnomedicinal Uses, Phytochemistry and Pharmacological ImportanceManika ManikaNessuna valutazione finora
- Court Testimony-WpsDocumento3 pagineCourt Testimony-WpsCrisanto HernandezNessuna valutazione finora
- AREVA Directional Over Current Relay MiCOM P12x en TechDataDocumento28 pagineAREVA Directional Over Current Relay MiCOM P12x en TechDatadeccanelecNessuna valutazione finora
- ECON 121 Principles of MacroeconomicsDocumento3 pagineECON 121 Principles of MacroeconomicssaadianaveedNessuna valutazione finora
- ReportDocumento7 pagineReportapi-482961632Nessuna valutazione finora
- DSP Tricks - Frequency Demodulation AlgorithmsDocumento3 pagineDSP Tricks - Frequency Demodulation Algorithmsik1xpvNessuna valutazione finora
- Cost-Benefit Analysis of The ATM Automatic DepositDocumento14 pagineCost-Benefit Analysis of The ATM Automatic DepositBhanupriyaNessuna valutazione finora
- Advantages and Disadvantages of A MonopolyDocumento7 pagineAdvantages and Disadvantages of A MonopolyRosalyn RayosNessuna valutazione finora
- Problem Set 12Documento5 pagineProblem Set 12Francis Philippe Cruzana CariñoNessuna valutazione finora
- Assignment Chemical Bonding JH Sir-4163 PDFDocumento70 pagineAssignment Chemical Bonding JH Sir-4163 PDFAkhilesh AgrawalNessuna valutazione finora
- Sigafoose Robert Diane 1984 SingaporeDocumento5 pagineSigafoose Robert Diane 1984 Singaporethe missions networkNessuna valutazione finora
- Cultural Practices and Academic Performance of Blaan Pupils in Sinapulan Elementary SchoolDocumento15 pagineCultural Practices and Academic Performance of Blaan Pupils in Sinapulan Elementary SchoolLorNessuna valutazione finora
- Wound Healing (BOOK 71P)Documento71 pagineWound Healing (BOOK 71P)Ahmed KhairyNessuna valutazione finora
- Overview of Isopanisad, Text, Anvaya and TranslationDocumento7 pagineOverview of Isopanisad, Text, Anvaya and TranslationVidvan Gauranga DasaNessuna valutazione finora
- Reviews: Bariatric and Metabolic Surgery: A Shift in Eligibility and Success CriteriaDocumento13 pagineReviews: Bariatric and Metabolic Surgery: A Shift in Eligibility and Success CriteriaJulia SCNessuna valutazione finora
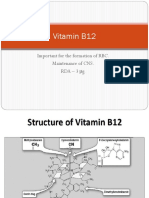
- Vitamin B12: Essential for RBC Formation and CNS MaintenanceDocumento19 pagineVitamin B12: Essential for RBC Formation and CNS MaintenanceHari PrasathNessuna valutazione finora
- 04-DDD.Assignment 2 frontsheet 2018-2019-đã chuyển đổi PDFDocumento21 pagine04-DDD.Assignment 2 frontsheet 2018-2019-đã chuyển đổi PDFl1111c1anh-5Nessuna valutazione finora
- Tips To Make Simple Lawn Attire Look StylishDocumento2 pagineTips To Make Simple Lawn Attire Look StylishPakistani DressesNessuna valutazione finora
- SMAW Product DevelopmentDocumento9 pagineSMAW Product Developmenttibo bursioNessuna valutazione finora
- Human Performance and LimitationsDocumento243 pagineHuman Performance and LimitationsListiyani Ismail100% (2)
- SLE On TeamworkDocumento9 pagineSLE On TeamworkAquino Samuel Jr.Nessuna valutazione finora
- Case DurexDocumento3 pagineCase DurexGia ChuongNessuna valutazione finora