Potrebbero piacerti anche
- Technical Manual SLI-System DS350C English PDFDocumento12 pagineTechnical Manual SLI-System DS350C English PDFstephen prosser100% (2)
- DS350 Error CodesDocumento12 pagineDS350 Error Codesefrain revillaNessuna valutazione finora
- ECOS Connection PrincipleDocumento1 paginaECOS Connection PrincipleSarra ChoucheneNessuna valutazione finora
- Carrier Hyd Schematic - 1 - With GraphicsDocumento1 paginaCarrier Hyd Schematic - 1 - With GraphicsAhmed Hassan Abo AsemNessuna valutazione finora
- AC-665 - Part2 - Operation - Manual - of - ChassisDocumento297 pagineAC-665 - Part2 - Operation - Manual - of - ChassisArslan Ahmed100% (1)
- LTM1080 PT1Documento14 pagineLTM1080 PT1William VillanuevaNessuna valutazione finora
- GMK5220 Super Pressure AdjustmentsDocumento9 pagineGMK5220 Super Pressure AdjustmentsAngel Dlsg100% (2)
- Services Manual Telescope Control BoxDocumento57 pagineServices Manual Telescope Control BoxAngel Dlsg100% (1)
- 07GMK 6250 SuspensionDocumento15 pagine07GMK 6250 SuspensionВиталий РогожинскийNessuna valutazione finora
- Wiring Carrier - ENDocumento118 pagineWiring Carrier - ENFarai Chamisa100% (3)
- AC50 1 68501 Part2 - enDocumento286 pagineAC50 1 68501 Part2 - enM Refai100% (1)
- 6200 - 1 Superstructure MalfunctionsDocumento82 pagine6200 - 1 Superstructure Malfunctionsrenat100% (1)
- LTM 1080 PT2Documento20 pagineLTM 1080 PT2William VillanuevaNessuna valutazione finora
- BMK LTF 1045-4 1 Ow-02 0000000 enDocumento48 pagineBMK LTF 1045-4 1 Ow-02 0000000 enjosselin quatrainNessuna valutazione finora
- Eks 83Documento4 pagineEks 83leo100% (4)
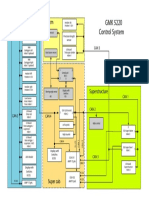
- VISIO-GMK 5220 SteuerungssystemDocumento1 paginaVISIO-GMK 5220 SteuerungssystemSarra ChoucheneNessuna valutazione finora
- Operation Manual AML-C-ATF50G-3Documento26 pagineOperation Manual AML-C-ATF50G-3Mario Bugia100% (1)
- GMK 3050 Pneumatic System: Deutsche GROVEDocumento6 pagineGMK 3050 Pneumatic System: Deutsche GROVEDaniel Castillo PeñaNessuna valutazione finora
- ECOS System OverviewDocumento57 pagineECOS System Overviewgaby100% (4)
- GMK 6220Documento14 pagineGMK 6220cornel_lupu100% (1)
- ECOS ErrorCodeViewer 5220 InstructionDocumento1 paginaECOS ErrorCodeViewer 5220 InstructionSarra ChoucheneNessuna valutazione finora
- Lec 074821Documento340 pagineLec 074821Mohamed Rashed100% (2)
- ErrorCodes 5220 V01 06Documento24 pagineErrorCodes 5220 V01 06Sarra Chouchene100% (1)
- ECOS 1 PresentationDocumento87 pagineECOS 1 PresentationLuis Jose Lloban100% (1)
- 999 enDocumento115 pagine999 enmonsieur_sonNessuna valutazione finora
- Superstructure Malfunctions - EUDocumento78 pagineSuperstructure Malfunctions - EUazamenNessuna valutazione finora
- EKS5 Main Boom Hardware GMK, TMSDocumento1 paginaEKS5 Main Boom Hardware GMK, TMSMiguel Del Valle AlonsoNessuna valutazione finora
- GMK 5100 ECOS Error Codes V2Documento9 pagineGMK 5100 ECOS Error Codes V24g lite100% (1)
- Pat OperatorsDocumento44 paginePat OperatorsGILMAR NIETONessuna valutazione finora
- Pat Iflex5Documento83 paginePat Iflex5aren_mendoza100% (3)
- CAN Bus LayoutDocumento1 paginaCAN Bus Layoutrenat0% (1)
- 5220 ECOS Components PDFDocumento25 pagine5220 ECOS Components PDFEduardo Alves80% (5)
- Technical Specifications: Zoomlion Ztc1100V Truck CraneDocumento92 pagineTechnical Specifications: Zoomlion Ztc1100V Truck CraneKiller boyNessuna valutazione finora
- ATF110G-5 EM4 1 Specifications 022015Documento52 pagineATF110G-5 EM4 1 Specifications 022015Mulatua Sirait100% (1)
- LTM 1200 Liebherr Cranes: 1.1 Fill Quantities For Crane ChassisDocumento1 paginaLTM 1200 Liebherr Cranes: 1.1 Fill Quantities For Crane ChassispurushmicroNessuna valutazione finora
- Derex AC140 140 Ton Truck CraneDocumento102 pagineDerex AC140 140 Ton Truck CraneHarsh Sharma100% (1)
- Carrier Malfunctions - EU PDFDocumento44 pagineCarrier Malfunctions - EU PDFrenat100% (1)
- Tadano ATF 220G 5Documento36 pagineTadano ATF 220G 5LEO_79_10100% (1)
- New ECOSDocumento95 pagineNew ECOSAhmed Hassan Abo Asem100% (11)
- ZLTL-1 Truck ZTC250-ZTC800 Operating ManualDocumento75 pagineZLTL-1 Truck ZTC250-ZTC800 Operating ManualSubkhi FauzanNessuna valutazione finora
- 4075 ECOS ComponentsDocumento27 pagine4075 ECOS ComponentsStanislas Massengo Londe100% (1)
- 999 enDocumento131 pagine999 enM RefaiNessuna valutazione finora
- CC2800 1 62397 Part2 - enDocumento510 pagineCC2800 1 62397 Part2 - enİlker Doğruok67% (3)
- دائرة المشحمة لونش مانتوكDocumento138 pagineدائرة المشحمة لونش مانتوكMohamed Rashed100% (1)
- Grove GMK7450 InglesDocumento60 pagineGrove GMK7450 InglesDanilo MarinNessuna valutazione finora
- Warning!!: Grove Manitowoc National Crane PotainDocumento4 pagineWarning!!: Grove Manitowoc National Crane Potainrodolfof_31100% (1)
- ECOS System LogicDocumento26 pagineECOS System LogicgabyNessuna valutazione finora
- EKS4 Simulation - DINDocumento16 pagineEKS4 Simulation - DINazamen0% (2)
- Technical Information LTF 1045-4.1: Overview of The Components With Identification (BMK)Documento12 pagineTechnical Information LTF 1045-4.1: Overview of The Components With Identification (BMK)josselin quatrainNessuna valutazione finora
- 5220 Carrier Pressure AdjustementDocumento13 pagine5220 Carrier Pressure AdjustementSarra ChoucheneNessuna valutazione finora
- AC 665-39005, 01partDocumento821 pagineAC 665-39005, 01partarslanahmedkhawaja100% (3)
- PAT Hirschmann IFlex5 Expert Install and Calib SyAzul PDFDocumento28 paginePAT Hirschmann IFlex5 Expert Install and Calib SyAzul PDFCarlos GuajardoNessuna valutazione finora
- GMK 5100 Gear Control SystemDocumento14 pagineGMK 5100 Gear Control Systemالمهندسوليدالطويل83% (6)
- GMK ECOS Preview Breakdown Via ModelDocumento4 pagineGMK ECOS Preview Breakdown Via Modelrodolfof_31Nessuna valutazione finora
- Service Technicians Information Supplement: Revised January 1997Documento48 pagineService Technicians Information Supplement: Revised January 1997Lucas Romero50% (2)
- GUE Standard Operating ProceduresDocumento19 pagineGUE Standard Operating ProceduresChef ShaneNessuna valutazione finora
- Instruction ManualDocumento76 pagineInstruction ManualAntonio FavuzziNessuna valutazione finora
- Kubota ZD1211 - ZD1211R - ZD1211L - ZD1211RL Zero Turn Mower Operators ManualDocumento110 pagineKubota ZD1211 - ZD1211R - ZD1211L - ZD1211RL Zero Turn Mower Operators ManualСвятослав ВороновNessuna valutazione finora
- 96 Pete Crusie TestDocumento10 pagine96 Pete Crusie TestAbdelbagiNessuna valutazione finora
- The Instant Handbook of Boat Handling, Navigation, and Seamanship: A Quick-Reference Guide for Sail and PowerDa EverandThe Instant Handbook of Boat Handling, Navigation, and Seamanship: A Quick-Reference Guide for Sail and PowerValutazione: 5 su 5 stelle5/5 (1)
- Series: Ratings Gross Input Gross Input Net Turbine Torque Power Torque LB-FT (N - M) HP (KW) LB-FT (N - M)Documento1 paginaSeries: Ratings Gross Input Gross Input Net Turbine Torque Power Torque LB-FT (N - M) HP (KW) LB-FT (N - M)Sarra ChoucheneNessuna valutazione finora
- Ratings and Specifications: Allison TransmissionDocumento2 pagineRatings and Specifications: Allison TransmissionSarra ChoucheneNessuna valutazione finora
- I5510 Service Manual PDFDocumento76 pagineI5510 Service Manual PDFSarra ChoucheneNessuna valutazione finora
- DIECIDocumento10 pagineDIECISarra ChoucheneNessuna valutazione finora
- Allison HT HTB CLT CLBT Electronic Control Transmissions Tips ManualDocumento51 pagineAllison HT HTB CLT CLBT Electronic Control Transmissions Tips ManualMauricio Gomez Gomez100% (1)
- Summary of Regulators For HMR 02 10.99 E PDFDocumento1 paginaSummary of Regulators For HMR 02 10.99 E PDFSarra ChoucheneNessuna valutazione finora
- SamiDocumento29 pagineSamiSarra ChoucheneNessuna valutazione finora
- GroveDocumento100 pagineGroveSarra Chouchene100% (1)
- Focus FactoryDocumento10 pagineFocus FactorySarra ChoucheneNessuna valutazione finora
- Regulating Motor: With: - Hydraulic Maximum Displacement Override - Counterbalance ValveDocumento10 pagineRegulating Motor: With: - Hydraulic Maximum Displacement Override - Counterbalance ValveSarra ChoucheneNessuna valutazione finora
- Engineering Specification: Photo Routing IndexDocumento17 pagineEngineering Specification: Photo Routing IndexSarra ChoucheneNessuna valutazione finora
- ADD41VG2600 Range SelectionDocumento1 paginaADD41VG2600 Range SelectionSarra ChoucheneNessuna valutazione finora
- ECOS RPM Factor CalibrationDocumento1 paginaECOS RPM Factor CalibrationSarra ChoucheneNessuna valutazione finora
- Hyd System OverviewDocumento1 paginaHyd System OverviewSarra ChoucheneNessuna valutazione finora
- ADD41VG2600 Range SelectionDocumento1 paginaADD41VG2600 Range SelectionSarra ChoucheneNessuna valutazione finora
- S4108M S4109M S4154M: Drive Layout OverviewDocumento1 paginaS4108M S4109M S4154M: Drive Layout OverviewSarra ChoucheneNessuna valutazione finora
- Servocom Steering BoxDocumento1 paginaServocom Steering BoxSarra ChoucheneNessuna valutazione finora
- AMG Error CodesDocumento1 paginaAMG Error CodesSarra Chouchene100% (1)
- Acrobat Reader 9 3D Toolbar Features Crane Care GMK TrainingDocumento3 pagineAcrobat Reader 9 3D Toolbar Features Crane Care GMK TrainingSarra ChoucheneNessuna valutazione finora
- ECOS ErrorCodeViewer 5220 InstructionDocumento1 paginaECOS ErrorCodeViewer 5220 InstructionSarra ChoucheneNessuna valutazione finora
- CAN Structure 03110169 1Documento1 paginaCAN Structure 03110169 1Sarra ChoucheneNessuna valutazione finora
- ECOS Software Overview April 08Documento1 paginaECOS Software Overview April 08Sarra ChoucheneNessuna valutazione finora
- EEPROM Data ManagementDocumento12 pagineEEPROM Data ManagementSarra ChoucheneNessuna valutazione finora
- Compressor/Vacuum Pumps For Liquid Waste Tankers: Truck SeriesDocumento4 pagineCompressor/Vacuum Pumps For Liquid Waste Tankers: Truck Seriessourov mutsuddyNessuna valutazione finora
- Scalar Wars The Brave New World of Scalar ElectromagneticsDocumento76 pagineScalar Wars The Brave New World of Scalar ElectromagneticsPerfectKey21Nessuna valutazione finora
- SEPL Product CatalogDocumento16 pagineSEPL Product CatalogPawan SaraswatNessuna valutazione finora
- Vapor Pressure of A Pure LiquidDocumento9 pagineVapor Pressure of A Pure LiquidLuluaNessuna valutazione finora
- Jacton Screw JacksDocumento5 pagineJacton Screw JacksWarren LeeNessuna valutazione finora
- Neng 301 Lecture 2 - The Structure of Thermodynamics (Dehoff, Chap. 2)Documento38 pagineNeng 301 Lecture 2 - The Structure of Thermodynamics (Dehoff, Chap. 2)Anonymous eJCLQ6Nessuna valutazione finora
- Strength of Material Chapter 3Documento22 pagineStrength of Material Chapter 3naserunnNessuna valutazione finora
- Morin, Actuator, MRPDocumento6 pagineMorin, Actuator, MRPinstrument chapNessuna valutazione finora
- 02 MotorDocumento99 pagine02 Motorkarol1177Nessuna valutazione finora
- Clutch Gp-TransmissionDocumento10 pagineClutch Gp-TransmissionLucas EduardoNessuna valutazione finora
- 5114 21 03.kitDocumento3 pagine5114 21 03.kitTimon2005Nessuna valutazione finora
- 12SEAGC1996 Site Stabilisation and Foundations For A High-Rise Building On A Steep Slope (Genting Highlands, Malaysia), 1996, Malaysia PDFDocumento8 pagine12SEAGC1996 Site Stabilisation and Foundations For A High-Rise Building On A Steep Slope (Genting Highlands, Malaysia), 1996, Malaysia PDFfreezefreezeNessuna valutazione finora
- Watts Radiant Radiant Heating ManifoldsDocumento28 pagineWatts Radiant Radiant Heating Manifoldse-ComfortUSANessuna valutazione finora
- Description: 2009 Dodge Journey SE 2009 Dodge Journey SEDocumento312 pagineDescription: 2009 Dodge Journey SE 2009 Dodge Journey SEChristian Martinez100% (1)
- Tajima CordingDocumento45 pagineTajima CordingWilsonGutierrezNessuna valutazione finora
- 2 1 1 Broschuere Klimakompressortausch - Spuelen Mahle 200127 GB ScreenDocumento9 pagine2 1 1 Broschuere Klimakompressortausch - Spuelen Mahle 200127 GB ScreenFloyd PriceNessuna valutazione finora
- Commander 408Documento63 pagineCommander 408andras100% (1)
- Psychrometry of Air Conditioning ProcessDocumento56 paginePsychrometry of Air Conditioning ProcessNazia ZamanNessuna valutazione finora
- Reynolds NumberDocumento21 pagineReynolds NumberShiela SorinoNessuna valutazione finora
- Flowserve PompeDocumento76 pagineFlowserve Pompemariasofiarossi50% (2)
- Cilindri PDFDocumento40 pagineCilindri PDFSlobodan SavicNessuna valutazione finora
- Wire Line ch-1Documento20 pagineWire Line ch-1Ammar HrzNessuna valutazione finora
- Sprinkler CalculationDocumento3 pagineSprinkler CalculationMiguel Angel Carcamo Ordaz100% (1)
- En 10029Documento3 pagineEn 10029hamoody_007100% (1)
- Troubleshooting: 4-1. Error ModesDocumento8 pagineTroubleshooting: 4-1. Error ModesluisNessuna valutazione finora
- Caesar II Applications GuideDocumento308 pagineCaesar II Applications Guidebanjinolimit8299100% (5)
- Punching Shear PDFDocumento13 paginePunching Shear PDFmohamedadel100Nessuna valutazione finora
- Plano Explosivo & Partes y Piezas Wmf-m160gbDocumento18 paginePlano Explosivo & Partes y Piezas Wmf-m160gbCatalina GonzalezNessuna valutazione finora
- Ocs Engineering & Construction (India) PVT LTD: Quality Assurance DepartmentDocumento1 paginaOcs Engineering & Construction (India) PVT LTD: Quality Assurance DepartmentvinothNessuna valutazione finora
- Alfa Laval Sru Rotary Lobe Pump Product LeafletDocumento7 pagineAlfa Laval Sru Rotary Lobe Pump Product LeafletErickson HamonanganNessuna valutazione finora