Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Proto Saharan Precursor of Ancient CivilizationsDocumento175 pagineProto Saharan Precursor of Ancient CivilizationsClyde Winters100% (4)
- Book of Dynamic Assessment in Practice PDFDocumento421 pagineBook of Dynamic Assessment in Practice PDFkamalazizi100% (1)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Spreadsheet Practice Exercises-2016FDocumento40 pagineSpreadsheet Practice Exercises-2016FDharneeshkarDandy92% (12)
- Reliability Technoology For Submarine Repeaters PDFDocumento8 pagineReliability Technoology For Submarine Repeaters PDFbolermNessuna valutazione finora
- Fire Art Case StudyDocumento15 pagineFire Art Case StudyKimberlyHerring100% (1)
- Sino-Japanese Haikai PDFDocumento240 pagineSino-Japanese Haikai PDFAlina Diana BratosinNessuna valutazione finora
- Liver Disease With PregnancyDocumento115 pagineLiver Disease With PregnancyAmro Ahmed Abdelrhman100% (3)
- MCN Drill AnswersDocumento12 pagineMCN Drill AnswersHerne Balberde100% (1)
- Assignment 2Documento4 pagineAssignment 2DharneeshkarDandyNessuna valutazione finora
- SR Latch:: State S R Q DescriptionDocumento2 pagineSR Latch:: State S R Q DescriptionDharneeshkarDandyNessuna valutazione finora
- Software ReqDocumento4 pagineSoftware ReqDharneeshkarDandyNessuna valutazione finora
- Chapter 7 For StudentsDocumento21 pagineChapter 7 For StudentsDharneeshkarDandyNessuna valutazione finora
- Root LocusDocumento12 pagineRoot LocusDharneeshkarDandyNessuna valutazione finora
- In The Koran Are The Words: "We Have Created Every Living Thing From Water"Documento7 pagineIn The Koran Are The Words: "We Have Created Every Living Thing From Water"DharneeshkarDandyNessuna valutazione finora
- Routing and Switching Essentials (Version 6.0) - RSE 6.0 Chapter 2 ExamDocumento1 paginaRouting and Switching Essentials (Version 6.0) - RSE 6.0 Chapter 2 ExamDharneeshkarDandyNessuna valutazione finora
- Solutions of David K Cheng PDFDocumento70 pagineSolutions of David K Cheng PDFDharneeshkarDandyNessuna valutazione finora
- Addressing Table: Issues Found: 1. Pc1 Ip Address 2. Pc4 Default Gateway 3. S1 Default GatewayDocumento1 paginaAddressing Table: Issues Found: 1. Pc1 Ip Address 2. Pc4 Default Gateway 3. S1 Default GatewayDharneeshkarDandyNessuna valutazione finora
- Packet Tracer - Skills Integration Challenge: Addressing TableDocumento3 paginePacket Tracer - Skills Integration Challenge: Addressing TableDharneeshkarDandyNessuna valutazione finora
- Fourier Properties Face DetectionDocumento4 pagineFourier Properties Face DetectionDharneeshkarDandyNessuna valutazione finora
- 15ECE211 Electronic CircuitsDocumento3 pagine15ECE211 Electronic CircuitsDharneeshkarDandyNessuna valutazione finora
- Basic Flip Flops in Digital ElectronicsDocumento10 pagineBasic Flip Flops in Digital ElectronicsDharneeshkarDandyNessuna valutazione finora
- Solutions of David K Cheng PDFDocumento70 pagineSolutions of David K Cheng PDFDharneeshkarDandyNessuna valutazione finora
- The Festival of LightsDocumento3 pagineThe Festival of LightsDharneeshkarDandyNessuna valutazione finora
- Maria MakilingDocumento2 pagineMaria MakilingRommel Villaroman Esteves0% (1)
- Diploma Pendidikan Awal Kanak-Kanak: Diploma in Early Childhood EducationDocumento8 pagineDiploma Pendidikan Awal Kanak-Kanak: Diploma in Early Childhood Educationsiti aisyahNessuna valutazione finora
- Strategic ManagementDocumento14 pagineStrategic ManagementvishakhaNessuna valutazione finora
- Approved Chemical ListDocumento2 pagineApproved Chemical ListSyed Mansur Alyahya100% (1)
- Eternal LifeDocumento9 pagineEternal LifeEcheverry MartínNessuna valutazione finora
- Indg 264.3 w02Documento15 pagineIndg 264.3 w02FrauNessuna valutazione finora
- Concentrating Partial Entanglement by Local OperationsDocumento21 pagineConcentrating Partial Entanglement by Local OperationsbhpliaoNessuna valutazione finora
- Essay EnglishDocumento4 pagineEssay Englishkiera.kassellNessuna valutazione finora
- Insung Jung An Colin Latchem - Quality Assurance and Acreditatión in Distance Education and e - LearningDocumento81 pagineInsung Jung An Colin Latchem - Quality Assurance and Acreditatión in Distance Education and e - LearningJack000123Nessuna valutazione finora
- ESU Mauritius Newsletter Dec 2014Documento8 pagineESU Mauritius Newsletter Dec 2014Ashesh RamjeeawonNessuna valutazione finora
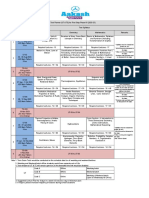
- UT & TE Planner - AY 2023-24 - Phase-01Documento1 paginaUT & TE Planner - AY 2023-24 - Phase-01Atharv KumarNessuna valutazione finora
- Mathsnacks05 InfiniteDocumento1 paginaMathsnacks05 Infiniteburkard.polsterNessuna valutazione finora
- Lorraln - Corson, Solutions Manual For Electromagnetism - Principles and Applications PDFDocumento93 pagineLorraln - Corson, Solutions Manual For Electromagnetism - Principles and Applications PDFc. sorasNessuna valutazione finora
- Need You Now Lyrics: Charles Scott, HillaryDocumento3 pagineNeed You Now Lyrics: Charles Scott, HillaryAl UsadNessuna valutazione finora
- Introduction To Instrumented IndentationDocumento7 pagineIntroduction To Instrumented Indentationopvsj42Nessuna valutazione finora
- GRADE 1 To 12 Daily Lesson LOG: TLE6AG-Oc-3-1.3.3Documento7 pagineGRADE 1 To 12 Daily Lesson LOG: TLE6AG-Oc-3-1.3.3Roxanne Pia FlorentinoNessuna valutazione finora
- Final PS-37 Election Duties 06-02-24 1125pm)Documento183 pagineFinal PS-37 Election Duties 06-02-24 1125pm)Muhammad InamNessuna valutazione finora
- Insomnii, Hipersomnii, ParasomniiDocumento26 pagineInsomnii, Hipersomnii, ParasomniiSorina TatuNessuna valutazione finora
- 19 Amazing Benefits of Fennel Seeds For SkinDocumento9 pagine19 Amazing Benefits of Fennel Seeds For SkinnasimNessuna valutazione finora
- Biology - Solved ExamDocumento27 pagineBiology - Solved ExamlyliasahiliNessuna valutazione finora
- SassigbmentDocumento7 pagineSassigbmentFurkaan Ali KhanNessuna valutazione finora
- RR 10-76Documento4 pagineRR 10-76cheska_abigail950Nessuna valutazione finora
- SHS11Q4DLP 21st CentFinalDocumento33 pagineSHS11Q4DLP 21st CentFinalNOEMI DE CASTRONessuna valutazione finora