Potrebbero piacerti anche
- FhryhfhfhDocumento3 pagineFhryhfhfhAffan AhmadNessuna valutazione finora
- Proposed Multimodal Terminal: Architect Rosauro H. Jamandri, M. ArchDocumento7 pagineProposed Multimodal Terminal: Architect Rosauro H. Jamandri, M. Archpepito manalotoNessuna valutazione finora
- Financial Management Predictive ModelingDocumento15 pagineFinancial Management Predictive ModelingShankaran RamanNessuna valutazione finora
- Beta Regression Modeling: Recent Advances in Theory and ApplicationsDocumento51 pagineBeta Regression Modeling: Recent Advances in Theory and ApplicationsmuralidharanNessuna valutazione finora
- Open Babylog Gbr61733xxt04Documento1 paginaOpen Babylog Gbr61733xxt04MarceloNessuna valutazione finora
- Lat 1Documento27 pagineLat 1uukumaediNessuna valutazione finora
- Lab 4 AssignmentDocumento7 pagineLab 4 AssignmentSeneida BiendarraNessuna valutazione finora
- Decision Tree - Ines Permatasari SetiawanDocumento14 pagineDecision Tree - Ines Permatasari Setiawanines100% (1)
- Stat LAS 4Documento8 pagineStat LAS 4aljun badeNessuna valutazione finora
- 1.-PROYECTO COMP - LAYANA PAREDES-Model PDFDocumento1 pagina1.-PROYECTO COMP - LAYANA PAREDES-Model PDFJuanCarlosLayanaParedesNessuna valutazione finora
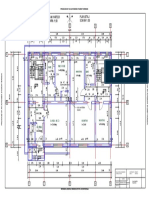
- Primera Planta: Patio Sala de Cocina Sala - ComedorDocumento1 paginaPrimera Planta: Patio Sala de Cocina Sala - ComedorNILSON VICTOR ODAR OROSCONessuna valutazione finora
- Nuevo Modelo Est.Documento1 paginaNuevo Modelo Est.Armando MirandaNessuna valutazione finora
- Checking, Selecting & Predicting With Gams: Mathematical Sciences, University of Bath, U.KDocumento21 pagineChecking, Selecting & Predicting With Gams: Mathematical Sciences, University of Bath, U.KKiril IvanovNessuna valutazione finora
- QuirogaJimena PreEntregaExpedientePlanosDocumento4 pagineQuirogaJimena PreEntregaExpedientePlanosJimena Quiroga GarridoNessuna valutazione finora
- Plan Parter+etajDocumento1 paginaPlan Parter+etajSHaZaMNessuna valutazione finora
- Proiect ConstructiiDocumento6 pagineProiect ConstructiiSHaZaMNessuna valutazione finora
- Lamina #10Documento1 paginaLamina #10Carlos CabreraNessuna valutazione finora
- PROYECTO COMP - LAYANA PAREDES-Model PDFDocumento1 paginaPROYECTO COMP - LAYANA PAREDES-Model PDFJuanCarlosLayanaParedesNessuna valutazione finora
- Formula: x= ∑f x Σ fDocumento9 pagineFormula: x= ∑f x Σ fMark Louise CasNessuna valutazione finora
- DECLARATORIA ModelDocumento1 paginaDECLARATORIA ModelClaudio Gabriel Alvarez DurandNessuna valutazione finora
- Data Distribusi Frekuensi SPSS Happy YulianiDocumento6 pagineData Distribusi Frekuensi SPSS Happy YulianiHAPPY YULIANINessuna valutazione finora
- 10 C1M2V6b - Scatter DiagramsDocumento2 pagine10 C1M2V6b - Scatter DiagramsMadiha ShafiqueNessuna valutazione finora
- FDBDFDocumento1 paginaFDBDFVictor RîndunicaNessuna valutazione finora
- White Paper Methods For Deformulating DrugsDocumento8 pagineWhite Paper Methods For Deformulating DrugsmtmpivvsNessuna valutazione finora
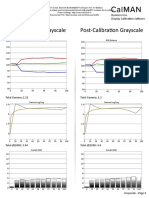
- Element EL4KAMZ5517 (Amazon Fire TV Edition) CNET Review Calibration ResultsDocumento3 pagineElement EL4KAMZ5517 (Amazon Fire TV Edition) CNET Review Calibration ResultsDavid KatzmaierNessuna valutazione finora
- Pareto Analysis Template 1Documento2 paginePareto Analysis Template 1Georgina SuleNessuna valutazione finora
- Plan DemisolDocumento1 paginaPlan Demisolade vitanNessuna valutazione finora
- Generation of Signals Aim:: All AllDocumento5 pagineGeneration of Signals Aim:: All AllVishnu BalanNessuna valutazione finora
- Punya HappyDocumento6 paginePunya HappyHAPPY YULIANINessuna valutazione finora
- Construccion 2-Layout1Documento1 paginaConstruccion 2-Layout1Maria Celeste Ramirez HurtadoNessuna valutazione finora
- Dowsing Chart Two PDFDocumento3 pagineDowsing Chart Two PDFrpk2010100% (1)
- Dowsing Chart One PDFDocumento3 pagineDowsing Chart One PDFrpk2010100% (1)
- Hasil Data SPSS Happy YulianiDocumento7 pagineHasil Data SPSS Happy YulianiHAPPY YULIANINessuna valutazione finora
- A7 - One Way AnovaDocumento7 pagineA7 - One Way Anovaeoip.swdept.mgmtNessuna valutazione finora
- Simulate Sal DataDocumento4 pagineSimulate Sal Dataapi-499791123Nessuna valutazione finora
- Frequencies: Lampiran Uji HomogenitasDocumento3 pagineFrequencies: Lampiran Uji HomogenitasIrfan SyahroniNessuna valutazione finora
- Plan Fundatii Si Detalii TribuneDocumento1 paginaPlan Fundatii Si Detalii TribuneGîlea ȘtefanNessuna valutazione finora
- Tugas StatistikDocumento1 paginaTugas StatistikJuli AstriNessuna valutazione finora
- Pareto Chart:: A Graph Will Automatically Build As You Enter Your Information Into The Table Below. Steps To FollowDocumento10 paginePareto Chart:: A Graph Will Automatically Build As You Enter Your Information Into The Table Below. Steps To FollowAmit R DwivediNessuna valutazione finora
- Nama: Sukirman NIM: 21103084 Kelas: Reguler B: FrequenciesDocumento3 pagineNama: Sukirman NIM: 21103084 Kelas: Reguler B: FrequenciessujidahNessuna valutazione finora
- Fox 7th ISM ch07-13Documento1 paginaFox 7th ISM ch07-13Ramón RamalhoNessuna valutazione finora
- Index of DifficultyDocumento15 pagineIndex of DifficultyYanHong100% (1)
- JBT - NANATI REVSI-Model1Documento1 paginaJBT - NANATI REVSI-Model1agussalim lammaseNessuna valutazione finora
- Asm 1 Opemanaaa 1Documento9 pagineAsm 1 Opemanaaa 1Thu NguyenNessuna valutazione finora
- Weibull Continuous Distribution 59Documento9 pagineWeibull Continuous Distribution 59Lê HoàngNessuna valutazione finora
- SPSS FileDocumento21 pagineSPSS Filevansham malikNessuna valutazione finora
- Regression Vs Bland-AltmanDocumento37 pagineRegression Vs Bland-AltmanjesusNessuna valutazione finora
- IdentitasDocumento5 pagineIdentitasNadia NingsihNessuna valutazione finora
- VU Calculator Percentage CGPA HelpDocumento3 pagineVU Calculator Percentage CGPA HelpMohsin ButtNessuna valutazione finora
- Outbye Conveyor Updates - 22 August 2023Documento3 pagineOutbye Conveyor Updates - 22 August 2023BrightNessuna valutazione finora
- Plantas, Elevacion y CortesDocumento1 paginaPlantas, Elevacion y CortesJheins Amaro GuizabaloNessuna valutazione finora
- Fatada Laterala Est Fatada PrincipalaDocumento1 paginaFatada Laterala Est Fatada PrincipalaBalázs ZoltánNessuna valutazione finora
- 7QC ToolsDocumento14 pagine7QC ToolsTechmate TechnologiesNessuna valutazione finora
- Anexa Nr. 2: Frecventa Procentaj Valid Procent Cumulative Procent Deloc Putin Bine Foarte Bine TotalDocumento4 pagineAnexa Nr. 2: Frecventa Procentaj Valid Procent Cumulative Procent Deloc Putin Bine Foarte Bine TotalValentin MotocNessuna valutazione finora
- Lamp IranDocumento18 pagineLamp IranZherlynPoetriBungzuNessuna valutazione finora
- Formato Calificaciones Quinto, Sexto, Octavo, Noveno, Primero Bgu, Segundo BguDocumento30 pagineFormato Calificaciones Quinto, Sexto, Octavo, Noveno, Primero Bgu, Segundo BguJavier RamosNessuna valutazione finora
- HASILDocumento2 pagineHASILDeasi Amalina IINessuna valutazione finora
- Primera Planta y Segunda PlantaDocumento3 paginePrimera Planta y Segunda PlantaJaime Jhovany Jetacama AguilarNessuna valutazione finora
- Kratochwill 1Documento30 pagineKratochwill 1Reynaldo ReguceraNessuna valutazione finora
- 37270a QUERCUS GBDocumento6 pagine37270a QUERCUS GBMocanu Romeo-CristianNessuna valutazione finora
- Thesis StoryboardDocumento5 pagineThesis StoryboardJill Brown100% (2)
- The Adoption of e Procurement in Tanzani PDFDocumento5 pagineThe Adoption of e Procurement in Tanzani PDFDangyi GodSeesNessuna valutazione finora
- Course Outline Principles of MarketingDocumento3 pagineCourse Outline Principles of MarketingKhate Tria De LeonNessuna valutazione finora
- DAB Submersible PumpsDocumento24 pagineDAB Submersible PumpsMohamed MamdouhNessuna valutazione finora
- 2SA1016Documento4 pagine2SA1016catalina maryNessuna valutazione finora
- Chapter 2 Axial and Torsional ElementsDocumento57 pagineChapter 2 Axial and Torsional ElementsAhmad FaidhiNessuna valutazione finora
- Gastone Petrini: Strutture e Costruzioni Autarchiche Di Legno in Italia e Colonie Caratteri e CriterDocumento9 pagineGastone Petrini: Strutture e Costruzioni Autarchiche Di Legno in Italia e Colonie Caratteri e CriterPier Pasquale TrausiNessuna valutazione finora
- Technical Test 03Documento13 pagineTechnical Test 03KartikNessuna valutazione finora
- Design of CouplingDocumento75 pagineDesign of CouplingVatsal BhalaniNessuna valutazione finora
- TOPIC: Movable and Immovable Property Under Section-3 of Transfer of Property ActDocumento10 pagineTOPIC: Movable and Immovable Property Under Section-3 of Transfer of Property ActRishAbh DaidNessuna valutazione finora
- GoodElearning TOGAF Poster 46 - Adapting The ADMDocumento1 paginaGoodElearning TOGAF Poster 46 - Adapting The ADMFabian HidalgoNessuna valutazione finora
- ECON 401/601, Microeconomic Theory 3/micro 1: Jean Guillaume Forand Fall 2019, WaterlooDocumento3 pagineECON 401/601, Microeconomic Theory 3/micro 1: Jean Guillaume Forand Fall 2019, WaterlooTarun SharmaNessuna valutazione finora
- Mi Account ေက်ာ္နည္းDocumento16 pagineMi Account ေက်ာ္နည္းamk91950% (2)
- Pursuit of Performance Findings From The 2014 Miller Heiman Sales Best Practices StudyDocumento37 paginePursuit of Performance Findings From The 2014 Miller Heiman Sales Best Practices StudyLoredanaNessuna valutazione finora
- Information Brochure: (Special Rounds)Documento35 pagineInformation Brochure: (Special Rounds)Praveen KumarNessuna valutazione finora
- IVISOR Mentor IVISOR Mentor QVGADocumento2 pagineIVISOR Mentor IVISOR Mentor QVGAwoulkanNessuna valutazione finora
- Sap EwmDocumento2 pagineSap EwmsirivirishiNessuna valutazione finora
- Warning: Shaded Answers Without Corresponding Solution Will Incur Deductive PointsDocumento1 paginaWarning: Shaded Answers Without Corresponding Solution Will Incur Deductive PointsKhiara Claudine EspinosaNessuna valutazione finora
- Burn Tests On FibresDocumento2 pagineBurn Tests On Fibresapi-32133818100% (1)
- FoundationDocumento98 pagineFoundationManognya KotaNessuna valutazione finora
- He Sas 23Documento10 pagineHe Sas 23Hoorise NShineNessuna valutazione finora
- Research Paper On N Queen ProblemDocumento7 pagineResearch Paper On N Queen Problemxvrdskrif100% (1)
- Eurocode Conference 2023 Seters Van Eurocode 7Documento33 pagineEurocode Conference 2023 Seters Van Eurocode 7Rodolfo BlanchiettiNessuna valutazione finora
- IPHPDocumento4 pagineIPHPAliah CasilangNessuna valutazione finora
- TOA Project Presentation (GROUP 5)Documento22 pagineTOA Project Presentation (GROUP 5)Khadija ShahidNessuna valutazione finora
- DYCONEX Materials en 2020 ScreenDocumento2 pagineDYCONEX Materials en 2020 ScreenhhaiddaoNessuna valutazione finora
- LITERARY THEORY BY TERRY EAGLETON NotesDocumento6 pagineLITERARY THEORY BY TERRY EAGLETON NotesPrachi SharmaNessuna valutazione finora