Potrebbero piacerti anche
- Capsule Research ProposalDocumento4 pagineCapsule Research ProposalAilyn Ursal80% (5)
- For SeminarDocumento17 pagineFor SeminarAnsh BaldeNessuna valutazione finora
- Deep Learning CheatsheetDocumento5 pagineDeep Learning CheatsheetFerda ÖzdemirNessuna valutazione finora
- Automatic Generation Control Using Artificial Neural Networks - HarkiratDocumento47 pagineAutomatic Generation Control Using Artificial Neural Networks - Harkiratmalini72Nessuna valutazione finora
- Highly Interconnected Processing Elements: 1. Neural Network ArchitecturesDocumento7 pagineHighly Interconnected Processing Elements: 1. Neural Network ArchitecturesMD AJMALNessuna valutazione finora
- Hebbian Learning and Gradient Descent Learning: Neural Computation: Lecture 5Documento20 pagineHebbian Learning and Gradient Descent Learning: Neural Computation: Lecture 5richaNessuna valutazione finora
- Neural NetworksDocumento45 pagineNeural NetworksDiễm Quỳnh TrầnNessuna valutazione finora
- Artificial Neural Network (ANN) : Duration: 8 Hrs OutlineDocumento61 pagineArtificial Neural Network (ANN) : Duration: 8 Hrs Outlineanhtu9_910280373Nessuna valutazione finora
- Ar$ficial Neural Network - : Adaline and MadalineDocumento22 pagineAr$ficial Neural Network - : Adaline and MadalineFaslil FawaidiNessuna valutazione finora
- Vanishing Gradient ProblemDocumento3 pagineVanishing Gradient ProblembgodabaNessuna valutazione finora
- Least Mean Square (LMS) Algorithm: 3.1 Spatial FilteringDocumento16 pagineLeast Mean Square (LMS) Algorithm: 3.1 Spatial FilteringterrorindarknessNessuna valutazione finora
- As Lecture9 NN2Documento2 pagineAs Lecture9 NN2mrtfkhangNessuna valutazione finora
- Comparison Between Beta Wavelets NeuralDocumento6 pagineComparison Between Beta Wavelets NeuralWajdi BELLILNessuna valutazione finora
- Ann 2Documento22 pagineAnn 2Jeril Joy JosephNessuna valutazione finora
- Lecture 8 - Supervised Learning in Neural Networks - (Part 1)Documento7 pagineLecture 8 - Supervised Learning in Neural Networks - (Part 1)Ammar AlkindyNessuna valutazione finora
- Artificial Neural NetworksDocumento61 pagineArtificial Neural NetworksNikhil Kumar sarwgiNessuna valutazione finora
- Hopfield Networks Is All You Need - Hopfield-LayersDocumento34 pagineHopfield Networks Is All You Need - Hopfield-LayersMohak ShuklaNessuna valutazione finora
- Shallow Neural NetworkDocumento152 pagineShallow Neural NetworkSreetam GangulyNessuna valutazione finora
- Mod 2.1,2.2Documento24 pagineMod 2.1,2.2Christeena AntonyNessuna valutazione finora
- Ece18898g Neural NetworksDocumento47 pagineEce18898g Neural NetworkssaiNessuna valutazione finora
- CENG3300 Lecture 9Documento19 pagineCENG3300 Lecture 9huichloemailNessuna valutazione finora
- Unit 2 - Soft Computing - WWW - Rgpvnotes.inDocumento20 pagineUnit 2 - Soft Computing - WWW - Rgpvnotes.inRozy VadgamaNessuna valutazione finora
- AI - Physics Informed Neural Network by ARNAB HALDERDocumento15 pagineAI - Physics Informed Neural Network by ARNAB HALDERARNAB HALDERNessuna valutazione finora
- DEU CSC5045 Intelligent System Applications Using Fuzzy - 5+ANNDocumento36 pagineDEU CSC5045 Intelligent System Applications Using Fuzzy - 5+ANNan7l7aNessuna valutazione finora
- Neural Networks: Derivation: 1 ModelDocumento9 pagineNeural Networks: Derivation: 1 ModelChristine StraubNessuna valutazione finora
- Machine Learning: Lecture 4: Artificial Neural Networks (Based On Chapter 4 of Mitchell T.., Machine Learning, 1997)Documento14 pagineMachine Learning: Lecture 4: Artificial Neural Networks (Based On Chapter 4 of Mitchell T.., Machine Learning, 1997)harutyunNessuna valutazione finora
- CS536: Machine Learning Artificial Neural NetworksDocumento32 pagineCS536: Machine Learning Artificial Neural NetworksAnand SNessuna valutazione finora
- 6COM1044 Deep Learning 1Documento49 pagine6COM1044 Deep Learning 1Amir Mohamed Nabil Saleh ElghameryNessuna valutazione finora
- l15 16 AutoencodersDocumento26 paginel15 16 AutoencodersRajakumar AwaradiNessuna valutazione finora
- Lecture 2 - Components of ANN and MATLAB RepresentationDocumento7 pagineLecture 2 - Components of ANN and MATLAB RepresentationAmmar AlkindyNessuna valutazione finora
- Deep Learning Unit 2Documento30 pagineDeep Learning Unit 2Aditya Pratap SinghNessuna valutazione finora
- Lect3 UWA PDFDocumento73 pagineLect3 UWA PDFअंकित शर्माNessuna valutazione finora
- Simon Chapter 3Documento12 pagineSimon Chapter 3shreyas srNessuna valutazione finora
- 7 NN Apr 28 2021Documento81 pagine7 NN Apr 28 2021Fairooz TorosheNessuna valutazione finora
- P1 - Single Layer Feed Forward NetworksDocumento52 pagineP1 - Single Layer Feed Forward NetworksYashaswiniNessuna valutazione finora
- Introduction To Neural Networks For Senior Design: August 9 - 12, 2004 Intro-1Documento33 pagineIntroduction To Neural Networks For Senior Design: August 9 - 12, 2004 Intro-1ucmatik1043Nessuna valutazione finora
- CNN and Gan: Introduction ToDocumento58 pagineCNN and Gan: Introduction ToGopiNath VelivelaNessuna valutazione finora
- Neural Networks For Machine LearningDocumento47 pagineNeural Networks For Machine LearningMohammad AlzyoudNessuna valutazione finora
- PDF DocumentDocumento17 paginePDF DocumentOsama MuhammadNessuna valutazione finora
- Machine Learning: Lecture 4: Artificial Neural Networks (Based On Chapter 4 of Mitchell T.., Machine Learning, 1997)Documento14 pagineMachine Learning: Lecture 4: Artificial Neural Networks (Based On Chapter 4 of Mitchell T.., Machine Learning, 1997)dollsicecreamNessuna valutazione finora
- Artificial Neural NetworkDocumento16 pagineArtificial Neural Networkmk100% (1)
- Classification AdvancedDocumento51 pagineClassification AdvancedBHADORIYA ADITYASINHNessuna valutazione finora
- Multilayer Perceptrons and Backpropagation Learning: 1 Some HistoryDocumento6 pagineMultilayer Perceptrons and Backpropagation Learning: 1 Some HistoryIgnacio IriarteNessuna valutazione finora
- FRJ PaperDocumento9 pagineFRJ PaperMattNessuna valutazione finora
- BackPropagation Through TimeDocumento6 pagineBackPropagation Through Timemilan gemerskyNessuna valutazione finora
- Neural Networks: Teacher: Elena Marchiori R4.47 Assistant: Kees Jong S2.22Documento18 pagineNeural Networks: Teacher: Elena Marchiori R4.47 Assistant: Kees Jong S2.22Hatem FaroukNessuna valutazione finora
- CS224n: Natural Language Processing With Deep LearningDocumento18 pagineCS224n: Natural Language Processing With Deep LearningJpNessuna valutazione finora
- ANN Revised Introduction PDFDocumento34 pagineANN Revised Introduction PDFdebasis nagNessuna valutazione finora
- Machine Learning: Chapter 4. Artificial Neural NetworksDocumento34 pagineMachine Learning: Chapter 4. Artificial Neural NetworksfareenfarzanawahedNessuna valutazione finora
- Lecture 9 - Supervised Learning in ANN - (Part 2) NewDocumento7 pagineLecture 9 - Supervised Learning in ANN - (Part 2) NewAmmar AlkindyNessuna valutazione finora
- L3 BackpropagationDocumento61 pagineL3 BackpropagationAlimohd AslamNessuna valutazione finora
- Module 4Documento36 pagineModule 4MD SHAHRIARMAHMUDNessuna valutazione finora
- Classification 1Documento78 pagineClassification 1chanakyaramakanthNessuna valutazione finora
- 6.034f Neural Net Notes October 28, 2010Documento7 pagine6.034f Neural Net Notes October 28, 2010Aniket RayNessuna valutazione finora
- Notes Chapter Neural NetworksDocumento18 pagineNotes Chapter Neural Networksradhika chawlaNessuna valutazione finora
- VectorisationDocumento11 pagineVectorisationIlie StefanNessuna valutazione finora
- Neural NetworkDocumento54 pagineNeural NetworkPratik Agrawal100% (1)
- Yale PDFDocumento6 pagineYale PDFthyagosmesmeNessuna valutazione finora
- A-level Maths Revision: Cheeky Revision ShortcutsDa EverandA-level Maths Revision: Cheeky Revision ShortcutsValutazione: 3.5 su 5 stelle3.5/5 (8)
- Bronchiolitis: Practice GapsDocumento11 pagineBronchiolitis: Practice GapsMichelleHanNessuna valutazione finora
- Platelet Disorders: Practice GapsDocumento14 paginePlatelet Disorders: Practice GapsMichelleHanNessuna valutazione finora
- Asthma: Practice GapDocumento21 pagineAsthma: Practice GapMichelleHanNessuna valutazione finora
- Use of C-Reactive Protein and Ferritin Biomarkers in Daily Pediatric PracticeDocumento14 pagineUse of C-Reactive Protein and Ferritin Biomarkers in Daily Pediatric PracticeMichelleHanNessuna valutazione finora
- Tumor Lysis Syndrome: Practice GapsDocumento9 pagineTumor Lysis Syndrome: Practice GapsMichelleHanNessuna valutazione finora
- Medical Student Guide Ophthalmology Match 0Documento23 pagineMedical Student Guide Ophthalmology Match 0MichelleHanNessuna valutazione finora
- Normal 2. Balanced Carrier 3. Trisomy 4. Monosomy (Autosomal Monosomy Not Viable)Documento4 pagineNormal 2. Balanced Carrier 3. Trisomy 4. Monosomy (Autosomal Monosomy Not Viable)MichelleHanNessuna valutazione finora
- Chapter 12 Practice AP TestDocumento34 pagineChapter 12 Practice AP TestMichelleHanNessuna valutazione finora
- Reading AssignmentsDocumento5 pagineReading AssignmentsMichelleHanNessuna valutazione finora
- 3R SolutionsDocumento64 pagine3R SolutionsMichelleHanNessuna valutazione finora
- AutoCAD Dinamicki Blokovi Tutorijal PDFDocumento18 pagineAutoCAD Dinamicki Blokovi Tutorijal PDFMilan JovicicNessuna valutazione finora
- Heat Exchanger Designing Using Aspen PlusDocumento6 pagineHeat Exchanger Designing Using Aspen PlusMeethiPotterNessuna valutazione finora
- The Role of OrganisationDocumento9 pagineThe Role of OrganisationMadhury MosharrofNessuna valutazione finora
- Sworn Statement of Assets, Liabilities and Net WorthDocumento3 pagineSworn Statement of Assets, Liabilities and Net WorthShelby AntonioNessuna valutazione finora
- Active Directory FactsDocumento171 pagineActive Directory FactsVincent HiltonNessuna valutazione finora
- Projects: Term ProjectDocumento2 pagineProjects: Term ProjectCoursePinNessuna valutazione finora
- Lemon AidDocumento17 pagineLemon AidJade Anne Mercado BalmesNessuna valutazione finora
- Danube Coin LaundryDocumento29 pagineDanube Coin LaundrymjgosslerNessuna valutazione finora
- QG To AIS 2017 PDFDocumento135 pagineQG To AIS 2017 PDFMangoStarr Aibelle VegasNessuna valutazione finora
- Quantum Hopfield NetworksDocumento83 pagineQuantum Hopfield NetworksSiddharth SharmaNessuna valutazione finora
- Notice For AsssingmentDocumento21 pagineNotice For AsssingmentViraj HibareNessuna valutazione finora
- Question Bank For Vlsi LabDocumento4 pagineQuestion Bank For Vlsi LabSav ThaNessuna valutazione finora
- INTERNSHIP PRESENTATION - Dhanya - 2020Documento16 pagineINTERNSHIP PRESENTATION - Dhanya - 2020Sanitha MichailNessuna valutazione finora
- Marley Product Catalogue Brochure Grease TrapsDocumento1 paginaMarley Product Catalogue Brochure Grease TrapsKushalKallychurnNessuna valutazione finora
- Pega AcademyDocumento10 paginePega AcademySasidharNessuna valutazione finora
- CH 2 Nature of ConflictDocumento45 pagineCH 2 Nature of ConflictAbdullahAlNoman100% (2)
- XI STD Economics Vol-1 EM Combined 12.10.18 PDFDocumento288 pagineXI STD Economics Vol-1 EM Combined 12.10.18 PDFFebin Kurian Francis0% (1)
- SMK Techno ProjectDocumento36 pagineSMK Techno Projectpraburaj619Nessuna valutazione finora
- Oxygen BarrierDocumento20 pagineOxygen BarrierKarina ArdizziNessuna valutazione finora
- Icom IC F5021 F6021 ManualDocumento24 pagineIcom IC F5021 F6021 ManualAyam ZebossNessuna valutazione finora
- Sealant Solutions: Nitoseal Thioflex FlamexDocumento16 pagineSealant Solutions: Nitoseal Thioflex FlamexBhagwat PatilNessuna valutazione finora
- We Move You. With Passion.: YachtDocumento27 pagineWe Move You. With Passion.: YachthatelNessuna valutazione finora
- WHO Partograph Study Lancet 1994Documento6 pagineWHO Partograph Study Lancet 1994Dewi PradnyaNessuna valutazione finora
- Sangeetahealingtemples Com Tarot Card Reading Course in UsaDocumento3 pagineSangeetahealingtemples Com Tarot Card Reading Course in UsaSangeetahealing templesNessuna valutazione finora
- A Comparison of Pharmaceutical Promotional Tactics Between HK & ChinaDocumento10 pagineA Comparison of Pharmaceutical Promotional Tactics Between HK & ChinaAlfred LeungNessuna valutazione finora
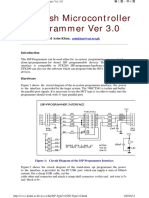
- ISP Flash Microcontroller Programmer Ver 3.0: M Asim KhanDocumento4 pagineISP Flash Microcontroller Programmer Ver 3.0: M Asim KhanSrđan PavićNessuna valutazione finora
- Sign Language To Speech ConversionDocumento6 pagineSign Language To Speech ConversionGokul RajaNessuna valutazione finora
- Soneri Bank Compensation PolicyDocumento20 pagineSoneri Bank Compensation PolicySapii Mandhan100% (1)