Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
AFCS
Caricato da
Leilson ArouchaCopyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
AFCS
Caricato da
Leilson ArouchaCopyright:
Formati disponibili
N° 2 - 34
Flight Operations Briefing Note
SUBJECT: description and recommended use of EC225 and EC725 AFCS
For the attention of
AIRCRAFT Version(s)
CONCERNED Civil Military
EC225 LP
EC725 AP
This Flight Operations Briefing Note 2-34 version 1 is a complete update of the FOBN 2-34 V0. In addition
the new document will include 2 new chapters, one is a description of the Hidden modes of the EC 225 /
725 AFCS reinforcing the cooperative aspect of the AFCS in term of safety, the other one is a detailed
description of “How-to-use” the AFCS upper modes in the objective to improve aircrew knowledge and
standardization, pilots confidence in the AFCS modes, and increase safety in operation,. This document
available to all Operators will be a base in developing Operations documents and Training Manuals.
Please take notice that this Flight Operations Briefing Note is neither a substitute nor a surrogate for the
Flight Manual which is the primary reference source and the final authority for all information regarding your
aircraft.
The material contained in this Briefing Note will also help trainers to identify additional training needs:.
Nevertheless, pilots are responsible for learning and understanding all rules and regulations to be applied to
their particular missions.
Revision 1 2014-11-14 page 1 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
Abbreviations
ACAS Airborne Collision Avoidance System
ADC Air Data Computer
AEO All Engines Operative
AFCAU Automatic Flight Control Auxiliary Unit
AFCS Automatic F l i g h t Control System
AHRS Attitude and Heading Reference System
ALT AFCS Altitude hold mode
AMC Aircraft Management Computer
AP Autopilot
APM AutoPilot Module
ATT ATTitude long term retention
BIT Built In Test
C Collective
CAT Catastrophic
CPU Central Processing Unit
CSAS Command a n d Stability A ugm en t at i on Sub-mode
DA Decision Altitude
DC Direct Current
DH Decision Height
DPIFR Dual Pilot IFR
DSAS Digital Stability Augm entation System
EHA Electro-Hydraulic Actuator
EID Electronic I n s t r um e n t Display
FADEC Full Authority Digital Engine Control
FCP Flight Control Panel
FDS Flight Display System
FHA Functional Hazard Analysis
FLI First Limit Indicator
FMS Flight Management System
FND Flight Navigation Display
F/TDN Fix and Trans Down
FTR Force Trim Release
GPS Global Positioning System
GS AFCS Glide Slope mode
GSPD AFCS Ground SPeeD mode
HAZ Hazardous
h/c Helicopter
HHO Helicopter Hoist Operator
HHT AFCS Hover HeighT mode
HOV AFCS HOVer mode
HUMS Health and Usage Monitoring System
HW Hardware
IAS Indicated Airspeed, or AFCS Airspeed mode
IFR Instrument F l i g h t Rules
IGE In Ground E f f e c t
ILS Instrument landing System
INS Inertial Navigation S ys t e m
I/O Input / Output
ISIS Integrated S t a n d b y I n s t r u m e n t S ys t e m
IVSI Instantaneous Vertical Speed Indicator
LRM Line Replaceable Module
LRU Line Replaceable Unit
LS Low Speed
LOC AFCS LOCaliser mode
MAJ Major
Revision 1 2014-11-14 page 2 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
MFD Multi-function Display
NCD No Computed Data
NPA Non Precision Approach
NVG Night Vision Goggle
OEI One Engine Inoperative
OGE Out of Ground E f f e c t
OSS Over Station Sensor
P Pitch
PC Personal Computer
PF Pilot Flying
PIO Pilot Induced Oscillation
PM Pilot Monitoring
PU Processing Unit
PWM Pulse Width Modulation
R Roll
RA Radio-Altimeter or Resolution Advisory
RCU Reconfiguration Unit
RMM Removable Memory Module
RVDT Rotary Variable Differential Transducer
SAR Search And Rescue
SAS Stability A ugm en t at i on System
SEMA Smart Electro-Mechanical Actuator
SPIFR Single Pilot IFR
SSM Sign/Status Matrix
SW Software
TA Traffic Advisory
TAS True Air Speed
TAU Temperature Adaptor Unit
TBC To Be Confirmed
TBD To Be Defined
TCAS Traffic Collision Avoidance System
VFR Visual Flight Rules
VIMI Vitesse Indiquée par Moyen Interne (French acronym for airspeed estimator)
VMS Vehicle Monitoring System
VNE Velocity "Never Exceed"
VOR Very High Frequency Omnidirectional Range
VS AFCS Vertical Speed mode
Vy Best Climb Speed
Vtoss Take-Off Safety Speed
Y Yaw
Revision 1 2014-11-14 page 3 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
CONTENTS
1. PRELIMINARY NOTES .......................................................................................................................... 6
1.1. Changes with AFCS software A.P SW 9.61 & FDS software P.U SW 5.11...................................... 6
2. AFCS GENERAL DESCRIPTION........................................................................................................... 8
2.1. EC225 APM 2000 Versions 9.43, 9.51, 9.61 ................................................................................... 8
2.2. Main components ............................................................................................................................ 8
2.3. SAR MODES CONTROLS (SAR variant only) .............................................................................. 10
3. CONTROL AND DISPLAYS ................................................................................................................. 11
3.1. FLIGHT CONTROL PANEL .......................................................................................................... 11
3.2. FLIGHT CONTROL GRIPS ........................................................................................................... 13
3.3. AFCS STRIP AND UPPER MODES DISPLAY .............................................................................. 14
4. AFCS BASIC STABILIZATION DESCRIPTION AND USE ................................................................... 16
5. AFCS UPPER MODES DESCRIPTION ............................................................................................... 18
5.1. GENERAL ..................................................................................................................................... 18
5.2. Heading (HDG) MODE .................................................................................................................. 20
5.3. VOR MODE:.................................................................................................................................. 22
5.4. ANAV: Long Range Navigation Mode............................................................................................ 25
5.5. LOC: Localizer MODE ................................................................................................................... 27
5.6. ALT: ALTITUDE HOLD MODE ...................................................................................................... 31
5.7. VS: VERTICAL SPEED HOLD MODE........................................................................................... 34
5.8. ALT.A: Altitude Acquisition MODE ................................................................................................. 36
5.9. IAS: Indicated Air Speed MODE .................................................................................................... 38
5.10. G/S: Glide Slope mode .............................................................................................................. 40
5.11. GA: Go Around mode ................................................................................................................ 43
5.12. CR.HT: Capture and Retention of Radar Height mode............................................................... 46
5.13. Optional TCAS II Mode: ACAS .................................................................................................. 51
6. Optional SAR modes ............................................................................................................................ 54
Revision 1 2014-11-14 page 4 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
6.1. HT/HOV: Hover Height Hold mode ................................................................................................ 54
6.2. GSPD: Ground Speed mode ......................................................................................................... 57
6.3. TDN: Guided Transition Down mode ............................................................................................. 58
6.4. TUP: Transition Up mode .............................................................................................................. 62
7. AFCS Upper modes Engagement / Disengagement and deviations matrix .......................................... 64
8. AFCS HIDDEN MODES ....................................................................................................................... 68
9. BEST USE OF AUTOMATION IN EC225 / 725 .................................................................................... 70
9.1. Generalities ................................................................................................................................... 70
9.2. Takeoff & departure....................................................................................................................... 74
9.3. Cruise............................................................................................................................................ 78
9.4. Climb and descent......................................................................................................................... 78
9.5. APPROACHES ............................................................................................................................. 78
Revision 1 2014-11-14 page 5 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
1. PRELIMINARY NOTES
1.1. CHANGES WITH AFCS SOFTWARE A.P SW 9.61 & FDS SOFTWARE P.U SW 5.11.
Checking the coherency of the software version is possible through the OFP PU version identifier displa yed
on the pre-flight test pages on the MFD's.
Figure 1: MFD at Pre-Flight test phase
These modifications consist of integrating the following operational changes:
Display of FDS software version on pre-flight test page,
ACAS II EC225 only,
DF935 frequency display,
DA/DH simultaneous display, DA OFF display and modification of DA/DH warning display and audio
warning,
DA/DH adjustment logic 1 ft./10 ft./50 ft.
Ground speed display in IAS scale,
Independence of pilot and copilot radar ranges,
TAWS priority page in MISD mode,
New PLS type 2 (ARS6 V12) EC725 only,
Addition of Sup mode announcements in AP strip,
The AP-coupled ACAS II mode identified as "ACAS" on the AFCS strip will only be operational if the
aircraft is equipped with ACAS II.
Revision 1 2014-11-14 page 6 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
Modification of position of STBY TACS and TEST symbols,
. Display of "TCN" source Nav in presence of TACAN in FMS Nav mode (absence of DME) EC725
only,
. PLS/DF display symbol EC725 only,
. Modification of BSK keys mode and control on MISD page for FLIR information only,
. Addition of label 273 (EGPWS label) on GP AN,
. NO NAV at power ON,
. Range locked in MISD/TAWS format,
. VOR/ILS identifier on NAVD and FND pages (3-character identifier),
. Active route/alternate route WPT identifier (number of WPT>8),
. Deviation Homing,
. Loss of leg to next waypoint on min. range on sector and map pages in FND and NAVD modes and
on MISD page,
. TCAS altitude display (display of one digit instead of two),
Revision 1 2014-11-14 page 7 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
2. AFCS GENERAL DESCRIPTION
2.1. EC225 APM 2000 VERSIONS 9.43, 9.51, 9.61
The EC225 AFCS 4-axes AFCS has been designed for a single pilot VFR and a dual pilot IFR utilization
under JAR 29 requirements. AFCS includes lateral and vertical upper modes with a S.A.R option in order to
reduce significantly pilot’s workload for Hands-Off flight.
This AFCS is “Fail-passive” 4-axes design based on a dual architecture allowing failure detection with
commands freeze, and a “Fail-operative feature providing piloting assistance even after failure thanks to
redundancy of ressources.
The main functions provided by the AFCS are basic stabilization mode (ATT) and Upper modes (ALT, HDG,
IAS, ALT.A, VS, GA, VOR, NAV, LOC & GS, CRHT, GSPD) and SAR modes as an option.
The system comprises:
2 Attitude and Heading Reference Systems, AHRS, which are a kind of Inertial Reference System. They
provide attitude, angular rates and acceleration. Coupled with a Magnetic Aircraft Sensor, MAS, an AHRS
becomes an Aircraft Piloting Inertial Reference System, APIRS and provides the heading.
using ADCs information, the AHRSs compute the vertical speed.
2 Air Data Computers, ADC, provide altitude, airspeed and vertical speed information.
1 Integrated Standby Instrument System, ISIS, backs up the system, providing a third source of attitude,
angular rate and air data.
2 double channel Auto Pilot Modules, APM. APM2 is the master, APM1 as hot standby, is ready to take
over upon failure of APM2. The APMs receive information from AHRSs, ADCs, they compute and send the
corresponding outputs to the actuators.
2.2. MAIN COMPONENTS
1 Automatic Flight Control Auxiliary Unit, AFCAU, is used to control and monitor the AFCS status,
Figure 2: AFCAU
Revision 1 2014-11-14 page 8 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
2 Flight Control Panels, FCP, are used to control and select the AFCS modes. The FCP's are personalized
via software to match the customer's options. E.g. SAR.
Figure 3: FCP SAR Variant EC225
Figure 4: FCP Standard EC225
Pilot / Copilot collective and cyclic Grips are used to control AFCS operation in ATT and upper modes.
Engagement and disengagement of the modes are displayed on the MFDs on a dedicated AFCS strip (Flight Display
System).
Finally, a Reconfiguration Control Unit, RCU, enables the crew to select an available source in the event of AHRS,
ADC, AMC or FCP discrepancy or failure.
Figure 5: RCU
Revision 1 2014-11-14 page 9 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
2.3. SAR MODES CONTROLS (SAR VARIANT ONLY)
For SAR variants, helicopters are equipped with additional systems and control boxes:
- 1 Hover sensor and dual radar altimeters with reconfiguration box
1 ON/OFF 2 1 ON/OFF 2
OFF FMS OFF OFF RA OFF
GPS TEST N
1 2 1 2
1 2
HOV
GSPD
Figure 6: SAR variant Reconfiguration Panels (left: GPS + DVS, right: 2 GPS)
2 Hover drift control boxes for Pilot and Winch man
Figure 7: Pilot drift control box and joystick hover control.
Figure 8: Winch man drift control box and hover joystick control.
Revision 1 2014-11-14 page 10 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
3. CONTROL AND DISPLAYS
3.1. FLIGHT CONTROL PANEL
Every pilot position is provided with identical FCP to engage, disengage, arm or preset/set the AFCS upper
modes:
First press on one of these knobs or pushbuttons (blue area) enables the pilot to engage or arm a mode, a
further press will disengage or disarm that mode.
Figure 9: LH / RH pilots FCP
IAS: Turning the knob preselects an IAS reference on the FNDs. This reference is indicated by a ◄ (bug)
on the airspeed indicators. When the bug is off the airspeed scale, an alphanumeric display recalls its value.
Pressing the knob engages IAS mode to the selected IAS. Bug turns green ◄. Turning the knob changes
the reference by 1 kt per notch. Pressing the knob without a speed pre-selection engages IAS mode at the
current IAS.
HDG: Turning the knob preselects a heading reference on the FNDs and NAVDs. Reference is indicated by
a ▼ (bug) -on compass zone. Pressing the knob engages HDG mode to the selected heading. Bug turns
green ▼. Turning the knob changes the reference by 1° per notch. Pressing the knob without a pre-
selection engages HDG mode on the current heading.
V/S: Turning the knob preselects a vertical speed reference on the FNDs. Reference is indicated by a ► on
Vertical Speed indicators. Pressing the knob engages V/S mode. Bug turns green ►. Once the mode is
engaged, turning any V/S knob changes the reference by 50ft/min per notch. Pressing the knob without a
prior selection engages the mode on the current V/S, within the range ± 2200 ft. /min.
ALT.A: Turning the knob preselects an altitude reference on the FNDs. Reference is indicated by a ► on
the Altitude indicators. When the bug is off the scale, an alphanumeric display recalls its value. Pressing the
knob engages VS mode and arms the ALT.A mode. Bug appears green ► when the reference altitude is
within +/- 300ft of actual altitude and ALT mode is automatically engaged.
ALT: Pressing ALT pushbutton maintains the current barometric altitude. A green bug ► indicates the
altitude reference on the FNDs.
CR.HT: Turning the knobs preselects a radar height reference. The bug, CRHT and the numerical value are
displayed in cyan on the radar altitude zone of the FNDs.
Pressing the knob engages the mode. The bug, CRHT label and the numerical value turn green. Pressing
the knob for the first time (without a prior selection) engages the mode at the current height (radalt).
HT/HOV*: Turning the knob preselects a radar height reference. The bug, HHT and the numerical value are
displayed in cyan on the radar altitude zone of the FNDs. Pressing the rotary switch engages the
autonomous trans down mode, allowing a descent along a 4.5 deg. slope and speed reduction to zero or
preselected ground speed. The bug and the numerical value turn green.
Pressing the knob without a prior selection engages the mode at the current value.
Revision 1 2014-11-14 page 11 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
F/TDN*: Pressing the “FIX-and-TRANSDOWN” pushbutton designates the overflown point to the FMS, to
mark the target, and engages the ANAV mode if FMS is the displayed navigation source on one of the
MFDs. This designation automatically brings the FMS into its Hover mode of operation. The FMS reversion
to its hover mode of operation automatically arms the AFCS TDN mode.
FND CPL: Pressing the pushbutton arms and engages the coupling of the VOR, ILS or ANAV navigation
source selected on the associated FND display.
NAVD CPL: Pressing the pushbutton arms and engages the coupling of the VOR, ILS or ANAV navigation
source selected on the associated NAVD display.
Revision 1 2014-11-14 page 12 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
3.2. FLIGHT CONTROL GRIPS
1. Upper modes disengagement 6. Collective Beep trim
2. Trim feel release on the cyclic axis 7. GA/TUP engage/disengage pushbutton
3. Cyclic Beep trim 8. Trim feel release on the collective axis
4. Ground Speed engage/disengage pushbutton
5. AP disengagement pushbutton
Figure 10: Cyclic and Collective grips
It is important to note that some pushbuttons are multifunction:
GA/TUP (7) is used for both manoeuvres Go Around or Transition Up
Upper Mode Disengagement (1): this pushbutton role change according to the ground / flight logic, it is
essential for pilots to familiarize with the various use of this pushbutton.
On ground: Short press: Erase all mode pre-selections
Long press: re-center the cyclic and erase all mode pre-selections
In Flight: Short press; Upper modes disengagement
Long press: Erase all modes pre-selection and disarms or disengages the ACAS mode
????
Revision 1 2014-11-14 page 13 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
3.3. AFCS STRIP AND UPPER MODES DISPLAY
Upper modes are displayed on FNDs in two lines and 3 columns:
A1 / B1 / C1 lines are the engaged modes, the A2 / B2 / C2 lines are the armed modes
From left to right, A column are modes using the Collective, B column are modes using on the Yaw / Roll
and C column are modes using the Cyclic longitudinal (pich axis).
Figure 11: AFCS strip
Col le ct iv e a xi s A1 Y aw /Ro ll a xi s B 1 Pit ch ax is C 1
CR.HT HDG IAS
ALT(*) ANAV ALT(*)
V/S(*) V/S(*)
GS(*) GS(*)
GA GA
HHT HOV HOV
T.UP T.UP
TDN TDN TDN
GSPD GSPD
FLYUP VOR1
VOR2
GS1(*) LOC1 GS1(*)
GS2(*) LOC2 GS2(*)
ACAS ACAS ACAS ACAS
- Engaged Modes
Revision 1 2014-11-14 page 14 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
Col le ct iv e a xi s A1 Y aw /Ro ll a xi s B 1 Pit ch ax is C 1
ALT HDG IAS
ALT ALT HDGHDG IASIAS
SAS SAS
- Degraded Modes
Col le ct iv e a xi s A2 Y aw /Ro ll a xi s B 2 Pit ch ax is C 2
TDN (**) TDN (**) TDN (**)
GS (*) LOC GS (*)
ALT.A(*) ALT.A(*)
VOR
ACAS (***) ACAS (***)
- Armed modes
-
- (*) Engaged/armed either on pitch or on collective axis
- (**) HT/HOV and F/TDN are upper modes fitted on EC225LP SAR variant.
- (***) ACAS is an upper mode fitted with TCAS II.
In addition to the color code, modes in the AFCS strip can be displayed with amber chevrons, for the pilot to
pay a particular attention to the engaged mode. This excessive deviation indication shall be considered by
the pilot as a difference between the reference of the engaged mode and the helicopter parameter. In case
of excessive deviation, the flight parameter must be monitored until this deviation decreases. If not, or if the
deviation amplifies, pilot shall prepare to take manualy the control of this axis. Further investigation must be
made before re-engaging the upper mode.
For more information on respective excessive deviation values per mode, see table page 58.
Col le ct iv e a xi s A1 Y aw /Ro ll a xi s B 1 Pit ch ax is C 1
Figure 12: Excessive deviation display
Revision 1 2014-11-14 page 15 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
4. AFCS BASIC STABILIZATION DESCRIPTION AND USE
When the cyclic stick is free, the AFCS commands the pitch and roll attitudes to hold internal AFCS attitudes
references (those attitudes references are not displayed).
This basic mode, called ATT, is a long term attitude retention, maintaining a stable attitude on pitch and roll,
and either a heading hold in hover or straight cruise flight or a coordinated turn in cruise flight.
ATT is the default mode when AFCS is engaged provided no failure or discrepancy affects the AFCS.
When Upper modes are disengaged, on one or more axis, the AFCS will operate in ATT on this / those axis
/ axes.
Small adjustments of those AFCS basic references can be preferably commanded by pilot’s actions on the
cyclic beep, but pilots will be able to override with cyclic and pedals using other techniques, detailed below:
Hover follow up: when below 40 KIAS (within a 30 to 40 KIAS hysteresis) the system will automatically
command the trims to reach the stick position on respectively, longitudinal and lateral axes, when the
angular rates are less than 2 deg/sec on respectively pitch and roll axes. Above this 2 deg/sec value, the
trim follow up is stopped avoiding over-control. Smooth and anticipated inputs are the key for a correct use
of this mode.
Override– airspeed above 40 KIAS: above 40 KIAS, a pilot input on the cyclic stick without any beep trim
or trim release action, will change the attitude and parameters accordingly, but the attitude reference
remains unchanged, trim motor is not commanded and AFCS will automatically fly back to the attitude
reference memorized before pilot input. This mode is used for temporary and quick change of parameters,
avoiding traffic, obstacle, birds flake, or NOE flights.
Beep trim: using the 4-ways switch on the cyclic grip to modify attitudes in pitch and roll. Used for gentle
and anticipated changes in attitude, this mode is the most comfortable but beep trim shall be applied on a
continuous manner up to the required attitude, avoiding multiple clicks on the beep trim. Attitudes will be
changed at a 2 deg/sec on Pitch, and 4 deg/sec on the Roll, allowing comfortable changes of parameters in
case of passengers transportation, for example.
Stick + Trim: pilot uses the 4-ways switch and the cyclic grip input at the same time, in this case the trim is
commanded to follow up the cyclic stick. This technique needs a great attention from the pilot, and may lead
to inaccurate parameters control.
Trim release: when the pilot presses the Force Trim Release pushbutton on the cyclic grip, all trim
actuators are declutched, including trim feel and motor. The AFCS turns into CSAS, and when Force Trim
Release pushbutton is released, the AFCS will hold the new pitch and roll attitudes references. This mode
shall be used carefully, as the cyclic anchoring point is temporarily lost, feeling of the cyclic suddenly
changes, then the trim release technique can be used as a short pulse, avoiding a long or continuous
pressure on the Force Trim Release pushbutton.
In case of a complete loss of AHRS inputs, AHRS discrepancies, AFCS degrades from ATT to a Stability
Augmentation System, SAS, causing the auto-trim function to deactivate. This mode shall be flown “Hands
On”, and does not allow any use of AFCS Upper modes, an anchoring point will still be present. If
Revision 1 2014-11-14 page 16 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
reconfiguration is possible, reengagement of the Upper modes can be performed, they will be displayed in
amber.
On the collective pitch, the trim is always active, pilot needs to depress the collective trigger to move the
collective pitch up, and down, or use the collective beep trim.
On the ground, AFCS provides a weakened stabilization and attitudes are synchronized. In addition, to
apply collective pitch, the collective trim release trigger shall be depressed whenever the collective lever is
moved.
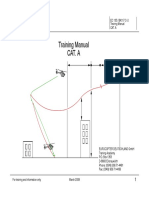
The collective range, when collective beep trim is used, and only when the collective beep trim is used, is
limited according to the airspeed: (see figure below)
These law applies also when either IAS mode or a vertical mode are held, or in CRHT/HHT (with IAS mode
engaged or not)
0 to 45 KIAS : Max Take off Power
45 to 65 KIAS: power limit will decrease linearly down to Maximum Continuous Power,
From 65 KIAS and above: Max Continuous Power.
Figure 13: Power limitation vs Indicated Airspeed
Revision 1 2014-11-14 page 17 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5. AFCS UPPER MODES DESCRIPTION
5.1. GENERAL
Each APM is composed of 2 channels and has its own processing resources, each channel being able to
compute and send commands to the actuators.
APM2 is master. APM2 is connected to the essential bus PP2 and will be powered by the battery even in
case of a failure on both alternators.
APM2 master controls all actuators, APM1, in standby, computes the same functions but initializes its
actuators outputs with the commands from the master.
APM disengagement is performed by a duplex software-monitored hardwired logic. It may occur:
After pilot request for manual disconnection.
Software request upon detection of an APM failure.
Watchdog release.
5.1.1. Master side concept.
When switching the power on, the default master side is the pilot side (right seat). The master side is
important to understand the little differences in altitude acquisition for example, because the system will take
into account the master side altitude reference. The master side is the side that has the inverse video on the
MFD, highlighting the navigation source text. The master side can be changed by coupling AFCS on the
relevant MFD side, even on the ground.
5.1.2. General Principles
Power limitation:
Power limitation is always active when APs are engaged with or without upper modes and as long as the
pilot does not depress the collective force trim release.
In AEO, TOP below 45 kt or MCP above 65 kt, with a linear decrease from TOP to MCP from 45 to 65 KIAS
In OEI, Crew selection, HI – LO – CT and 96% minimum of NR. Below 30ft Radar Height, Collective pitch
will not be reduced any more by the AFCS. ???
Engagement of upper modes (ALT, IAS, HDG, V/S, CRHT, HHT):
Engagement at present value or
Pre-set a value and engage the mode later.
HDG, ALT, ALT.A, V/S, CR.HT, HHT, HOV, GSPD reference values are common to each half system, (pilot
and copilot sides). These modes may be pre-set, engaged and modified from either side.
VOR, LOC/GS, ANAV, FTDN are independently controlled from each side.
Revision 1 2014-11-14 page 18 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5.1.3. Actuators
An AP controls the 4 servos of the hydraulic unit, 4 trim actuators and additional SEMA (Smart Electro
Mechanical Actuator). These 3 SEMA (pitch, roll and yaw) will still provide stabilization upon loss of the AP
hydraulic system. (It means that all the modes engaged on the collective axis are disengaged). All these
actuators are said “limited authority” as they can only move ± 13 to 15% on Pitch, Roll and Yaw control axis.
Trim actuators speed is 5 % per second.
5.1.4. Introductory note Não basta somente um AP?
For every A.FCS mode, basic or upper, the first condition for a normal operation is to have both APs, 2 and
1, engaged, with all axes operational in ATT mode and the desired modes armed or engaged. The second
condition is to be “in flight” where the GRD/FLT logic applies. The third condition is the availability of main
inertial motion sensors: the AHRSs.
5 obvious conditions will therefore not be repeated in the subchapter “if it doesn’t work”:
AFCS disengagement
Loss of the relevant axis
Pilot pressing the upper modes disconnect button on the cyclic
Aircraft on the ground
AHRS discrepancy
Revision 1 2014-11-14 page 19 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5.2. HEADING (HDG) MODE
HDG mode maintains the current heading upon engagement or acquires and holds a pre-selected heading.
5.2.1. How it works:
When HDG mode is engaged, AP controls the roll attitude, and the coordinated turn (ball centered) is
assumed. Standard heading change rate is roughly 3°/second. Banking angle is limited to 0.16 times the
IAS in kt. Maximum bank angle is 22° ( E.g., 16° at 100 kt, 22° at 140 kt). In normal conditions, AHRS2, pilot
side, is used to supply the heading, AHRS1 is monitoring. The roll angular rate is limited to 5° /sec. Once on
the pre-selected heading, A.P holds the heading reference via the yaw axis until the heading error is above
4° or until a change of the HDG reference is commanded.
Turning any HDG FCP’s rotary switch change the reference by 1° per notch. A lateral command on the
cyclic beep stick changes the reference at a 5°/second rate.
5.2.2. How to use it (HDG):
Helicopter airspeed must be above 26 KIAS.
Two techniques can be applied to control helicopter heading through this upper mode:
PRESET + ENGAGE or ENGAGE
PRESET + ENGAGE:
Turning the rotary switch materializes a cyan bug on the FND’s and NAVD’s heading scale. This pre-
selection can be cancelled, in flight, upon pilot’s action on any upper modes disconnect button for at least 1
second. Then Press HDG to engage the mode, the reference bug turns green. The system will command a
turn in the direction of the reference change action. Further heading change is possible from any FCP or by
any lateral beep trim, and aircraft will be commanded to turn in the direction of the HDG switch rotation,
even if the deviation exceeds 180°.
Figure 14/ HDG mode reference bug on HSI
ENGAGE:
By directly pressing the rotary switch, HDG is engaged on the helicopter actual heading. HDG illuminates in
green color on the FND/AFCS strip. Further heading change is possible from any FCP or by any lateral
beep trim.
Then, when changing the reference left or right, the helicopter will turn to the HDG switch rotation side, even
if the heading difference exceeds 180°.
NOTE: It means that it is possible, once the mode is engaged, to perform a full circle in the desired direction
(it is not the case on 332 L1 & L2 HDG mode).
Revision 1 2014-11-14 page 20 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5.2.3. It doesn’t work (HDG):
Helicopter airspeed is below 26 KIAS.
If there is a discrepancy by more than 7° between the 2 AHRS, HDG label turns amber with the
display of a caution arrow on the relevant scale.
Complete loss of magnetic heading for, at least, 30 seconds.
In case of invalidity of the heading received from the selected source, the AFCS freezes the heading,
calling pilot's attention by flashing amber HDG for up to 30 seconds and disengages the mode.
Some modes are not compatible with HDG: ANAV, VOR, LOC, HOV or GSPD Modes engagement will
disengage HDG mode. But we can use this incompatibility to take over the control from the pilot side to the
copilot side when ANAV is engaged, for example. It means that if you want to swap the master side, ANAV
for example, first engage HDG then reengage ANAV on the other side.
5.2.4. Summary of HDG mode displays:
A HDG label is displayed in green color on the FND/AFCS strip:
HDG is green when AHRSs are working properly.
When the pilot overrides the roll axis, HDG label color toggles between amber and green.
HDG label turns into amber when AFCS detects a loss of confidence in sensors.
HDG flashes in amber inverse video for up to 30 s. upon loss of heading, until auto mode
disengagement.
An excessive deviation indication (blinking amber chevrons around HDG label) is sent to the pilot if
the heading error exceeds 10° while hands-on roll axis.
The reference is indicated on the heading scale by a cyan bug when a heading is pre-selected and
by a green bug once the mode is engaged. In sector mode, when the bug is out of scale, an
alphanumeric display recalls its value.
HDG once engaged, every reference change is associated to a white flashing underlining HDG label
together with a white-green flashing bug and value.
Revision 1 2014-11-14 page 21 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5.3. VOR MODE:
The VOR mode acquires and tracks a pre-selected VOR course.
5.3.1. How it works (VOR):
AFCS controls the roll attitude. Coupling can be performed by pressing NAVD-CPL or FND-CPL on FCPs,
to either on NAVDs or FNDs, as long as the navigation source is set to VOR1 or VOR2.
The minimum helicopter airspeed for engagement is 35 KIAS.
The commanded roll attitude is limited to 0.16 times IAS in kt with a max bank angle of 22°.
There is no excessive deviation computed for VOR mode.
Depending on the VOR deviation, the mode may be armed, in cyan or captured, in green.
Arming: when VOR deviation is valid but too large, the pilot has to set an interception heading to the desired
VOR course. The maximum recommended angle of intercept is 90° at a distance greater than 6 nautical
miles.
Over Station Sensor (OSS) or fast CRS change with the mode engaged: VOR 1 or VOR 2 turn amber and
the aircraft use the course as a track reference value for few seconds, allowing the Pilot Flying (PF) to select
the next course to be flown after station passage.
5.3.2. How to use it (VOR):
The use of VOR mode is usually via an Armed status while maintaining the HDG mode engaged for the
interception. The HDG mode is managed by the pilot and attention shall be paid to the interception angle,
according to the distance of the navaid.
Set VOR1 or 2 as a navigation source on FND or NAVD, VOR2 is recommended for the RH pilot side,
VOR1 for the LH copilot side.
Pre-set a course, using the CRS rotary switch on the appropriate FCP
On each pilot's side, it’s possible to pre-set 2 different courses on 2 different VOR: one on the FND and one
on the NAVD, or swapping between both VOR on the same MFD. To set a course on the 2 different MFD,
press on CRS rotary switch, on the relevant FCP, until the alphanumerical CRS value is
surrounded on the MFD to be modified.
Arm or capture: Press FND CPL or NAVD CPL pushbutton on the relevant FCP.
If the capture conditions are not satisfied, the mode will remain VOR 1 or VOR 2 label in
cyan on the AFCS strip during the interception phase.
Revision 1 2014-11-14 page 22 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
Figure 15: NAVD with VOR 1 source
If the aircraft is under an interception heading, after capture, VOR label changes from cyan to green color
VOR1/2 and engagement of VOR mode disengages HDG mode if previously engaged for intercept.
After arming the mode or capture, the course reference can be modified via the CRS rotary switch on the
FCP - little CRS correction of +/- 8° from Initial course setting will allow smooth AFCS reaction at a rate of
0,25°/sec., large CRS changes lead to an immediate AFCS correction.
If a hold is expected overhead the VOR, it’s more reliable to perform this hold using the FMS/Hold function.
When flying over the VOR beacon, the VOR bearing indicator will show fast and large amplitude variations.
To avoid the AFCS chasing the needle, upon detection of the phenomenon of rapid needle motion for at
least 10 seconds, the VOR mode holds a track almost aligned on the course, with a VOR 1/2 in amber, until
the VOR signal is stabilized for 10 seconds and resumes the tracking.
5.3.3. It doesn’t work (VOR):
When airspeed is below 35 KIAS.
Interception distance is too small (less than 6 nm).
Combination of high speed, close distance from the VOR and interception angle close to 90°.
Due to the bank angle limitation at 22°, the AFCS is probably going to overshoot. Reduce the
airspeed and help the system by overriding the bank angle during the capture without exceeding the
maximum authorised angle of bank in IFR (usually a maximum of 30° AOB should be applied and
briefed).
Loss of VOR bearing for at least 60 sec.
Change of VOR frequency for less than 15 sec.
Complete loss of heading for at least 30 sec.
Engagement of HDG, ANAV, LOC, GA, HOV or GSPD modes disengages VOR mode.
VOR without valid DME cannot be coupled either on NAVD or on FND in sector (SCT) mode (lack of range
indication). In this case, the following message is displayed indicating that only the FND HSI mode can be
used
Revision 1 2014-11-14 page 23 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5.3.4. Summary of VOR mode displays:
VOR1 or VOR2: Captured, label is displayed in green
VOR1
VOR2
Armed, label is displayed in cyan
VOR1
VOR2
Upon pilot’s override on roll axis, label color toggles between amber and green
VOR 1/2 label color turns to amber when AFCS detect a loss of confidence at sensors
VOR 1/2 label flashes in amber inverse video upon loss of bearing signal before mode
disengagement.
VOR 1/2 then VOR 1/2 at the station passage, the VOR mode is in OSS phase: the mode holds a
heading and the CRS knob can be set to another outbound course. After 10 sec stabilization the
VOR mode turns back automatically to green and resumes the tracking.
Course reference is indicated on the heading scales by a blue bar with a laterally moving bar
showing the VOR course deviation. Once the VOR mode is engaged, bars turn into green color.
Every course reference change is associated to a white flashing underlining of the VOR label.
Figure 16: FND HIS display
Revision 1 2014-11-14 page 24 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5.4. ANAV: LONG RANGE NAVIGATION MODE
The mode enables the aircraft to follow a selected path.
5.4.1. How it works (ANAV):
AFCS control is on the roll attitude. Coupling the ANAV lateral mode can be performed either by pressing
NAVD-CPL or FND-CPL on FCPs, as long as the navigation source is set to ANAV.
Minimum helicopter airspeed for engagement is 35 KIAS.
The source of navigation is the FMS. The FMS computes aircraft position using different sensors (GPS,
VOR/DME, DME/DME, DVS, INS), and wind drift, depending on installed equipment and optional.
ANAV mode is created, modified and refreshed via the FMS keyboard.
2 navigation routes may be displayed on the NAVD’s, firstly the active route, secondly the alternate route
displayed in dark blue.
Figure 17: NAVD route symbology
5.4.2. How to use it (ANAV):
When ANAV is engaged, horizontal guidance is managed by the FMS. Pilots shall pay attention to traffic
and obstacles. Avoid mixed flying (ANAV mode only engaged) and associate this lateral guidance to
longitudinal (IAS) and vertical (ALT, or CRHT on flat ground) to activate all safety features available from the
AFCS. Overriding the ANAV mode can be used, in case of urgency such as traffic, birds hazard or obstacle
avoidance,
Set ANAV as a navigation source on FND or NAVD.
Create or use a stored route, using the FMS keyboard.
Check on the NAVD, the validity of the navigation.
Engage the mode by pressing FND or NAVD CPL.
The pilot who presses first FNDCPL or NAVDCPL, becomes master for AFCS with ANAV label displayed in
reverse video ANAV on the corresponding MFD.
FND CPL, NAVD CPL can be engaged or armed only on one FCP at a time.
Direct engagement on the other FCP is not permitted unless the coupling has been disengaged on the
engagement side (to swap the master side).
HDG mode engagement on any FCP disengages FND CPL or NVD CPL.
Revision 1 2014-11-14 page 25 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
No excessive deviation chevrons are displayed to the pilot.
This mode is tied up to the FMS, a late reconfiguration of the navigation (change of runway configuration in
IFR) can significantly increase the crew workload and lead to a loss of situational awareness. In no case
select a manual flying while disconnecting the FMS guidance, select another upper mode for the lateral
guidance like HDG.
5.4.3. It doesn’t work:
Helicopter airspeed is below 35 KIAS
Navigation source had changed for at least 30 sec. If it is restored within 30 seconds, the ANAV mode is
kept engaged.
Loss of commanded roll attitude for at least 30 sec.
Engagement of HDG, VOR, LOC, HOV, GSPD or TDN modes disengages ANAV mode.
Safety: - In case of ANAV mode disengagement and return to long term attitude retention, aircraft returns to
a zero Angle Of Bank.
- In case of commanded roll attitude invalidity, AFCS brings back to 0° angle of bank and calls pilot attention
by flashing the ANAV label in amber for up to 30 sec, then disengages the mode.
5.4.4. Summary of ANAV mode displays
ANAV label is displayed in green on the AFCS strip.
Upon pilot overrides against effort (trim) or Force Trim Release on roll axis, label colour toggles
between amber and green.
ANAV label color turns to amber when AFCS detect a loss of confidence in the primary sensors
required for the engaged mode. This change of color is associated to a flashing amber rectangle
around the label for 10 sec.
ANAV label flashes in amber inverse video upon loss of roll steering commands or navigation
change, until mode disengagement.
The reference pattern is displayed on the NAVDs.
MSG label flashes for 10 seconds then is steady on FND's or NAVD's when a new message is
sent by the FMS.
Revision 1 2014-11-14 page 26 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5.5. LOC: LOCALIZER MODE
The LOC mode allows interception and alignment of the helicopter on a localizer signal of an ILS – ILS/DME
approach.
5.5.1. How it works (LOC):
The AFCS controls the roll attitude. Coupling can be performed either on FNDs or NAVDs as long as the
navigation source is set to ILS1 or ILS2.
Minimum airspeed for engagement is 35 kt.
The system is able to discern between a VOR and an ILS frequency.
There are 2 possible phases:
1. Armament: LOC mode keeps this status as long as Loc deviation is valid but out of the dot range,
LOC label is cyan on the AFCS strip. The pilot has to fly an intercept heading preferably using HDG
or ANAV.
Figure 18: NAV source ILS magenta
2. Capture: Once Loc deviation is below 2.5 dots for at least 2 sec, AFCS can capture the desired loc
course. The loc deviation bar turns from magenta to green color. The capture conditions depend on
the difference between intercept heading and localizer course. If the angle is higher than 25° and the
loc deviation is below 2.1 dots, the mode aligns the aircraft on the loc beam. If the angle is lower
than 25°, capture occurs at 1 dot. However, below 2.1 dots, the AFCS introduces a maximum of 30
sec to capture the loc beam, even if the deviation still exceeds 1 dot. (in case of a small angle of
interception)
If the loc deviation exceeds 2.2 dots for at least 0.6 sec during the first 60 sec following the mode’s capture
and then deviates 1/3 of a dot for more than 0.6 sec, an “excessive deviation” caution chevron will be
present on the FNDs.
NOTE
The Angle of Bank is limited to 0.225 times the air speed in kt (1.5 times the
standard rate) and can reach a maximum of 30 deg. during LOC mode phase of
interception.
If both LOC deviations are valid but differ by more than 0.25 of a dot, the AFCS changes the LOC label to
amber and displays a discrepancy arrow:
Revision 1 2014-11-14 page 27 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5.5.2. How to use it (LOC):
The use of LOC mode is usually anticipated and set in Armed status while maintaining the HDG or ANAV
mode engaged for the interception. The heading mode is managed by the pilot, i.e. for radar vectors. ANAV
manage the published route for a STAR if available in the FMS.
After setting the appropriate frequencies on both radionav systems, select ILS1 on the LH side FND and
ILS2 on the RH side FND as a navigation source.
Set the course on both sides prior to arm or capture the LOC mode.
In addition, it can be wise to prepare the right NAVD, with the ILS1 as back-up, and then change display to
back to the NAVD,(in case of failure of ILS2 the PF will select ILS1 source on NAVD) .
ILS1 ILS2
110.10 110.10
Figure 19: pilot / copilot ILS selection logic.
Configuration of the MFD’s left to right could be:
Arm the mode by pressing FNDCPL, LOC is armed and GS, if available,
When armed, LOC1or LOC2 is displayed in cyan on the second line of the AFCS strip, meaning that A.P
keeps the lateral mode (HDG or ANAV) until LOC is captured.
GS mode will always capture only when LOC mode is captured.
Revision 1 2014-11-14 page 28 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5.5.3. It doesn’t work (LOC):
Navigation source is not an ILS frequency.
Check if the course is set properly (to avoid oscillations on the LOC)
Navigation source changes for at least 10 sec.
Loss of Loc signal for at least 10 sec.
Change of ILS frequency for at least 10 sec.
Complete loss of heading for at least 10 sec.
Engagement of GA disarms / disengages LOC mode.
Engagement of HDG, ANAV, VOR, GA, HOV or GSPD modes disengages LOC mode.
ILS NAV source label is in amber if both ILS receivers are not on the same frequency, showing that
the system has a loss of redundancy. In this situation, an ILS approach can be performed with Upper
mode LOC + GS, but Pilots should monitor the parameters along the ILS.
ILS NAV source label is amber if the ILS selection is not compliant with system monitoring logic;
ILS1 on left side, ILS2 on right side, an ILS approach can be performed with Upper mode LOC + GS
Figure 20: NAV source ILS amber.
5.5.4. Summary of LOC mode displays
LOC1 or LOC2: Armed, label is displayed in cyan LOC1 LOC2
Captured, label is displayed in green LOC1 LOC2
Upon pilot’s override on roll axis, label color toggles between amber and green.
LOC label color changes to amber when AFCS detect a loss of confidence at sensors. This change
of color is associated to a flashing amber rectangle around the label for 10 seconds.
LOC label flashes in amber inverse video upon loss of deviation signal until mode disengagement.
Course reference is indicated on the heading scales by a blue bar with a laterally moving bar
showing the LOC deviation. Once the mode is captured, bars change into green color. Every course
reference change is associated to a white flashing underlining of the LOC label. Its numerical value
is also displayed.
Revision 1 2014-11-14 page 29 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
Figure 21: HSI ILS display
E.g: ILS2 armed ALT ANAV IAS
GS2 LOC2
Then, ILS2 when captured GS2 LOC2 IAS
NOTE
For more than one dot of lateral deviation a double amber arrow is
displayed around the mock-up. It indicates the direction of correction to
come back on the localiser
Figure 22: HSI ILS display (amber arrows)
In case of ALT.A use, GS2 armed indication will be temporarily superseded by ALT.A label, but GS2 is still
in armed mode.
Revision 1 2014-11-14 page 30 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5.6. ALT: ALTITUDE HOLD MODE
The ALT mode maintains the current barometric altitude at the FND side of engagement.
5.6.1. How it works (ALT):
The AFCS either controls the pitch attitude or the collective stick.
If only ALT is pressed with an indicated airspeed below 60 KIAS, the mode will engage on the collective axis
and shift automatically to the pitch axis when the airspeed exceeds 65 KIAS for at least 5s.
If ALT is engaged at airspeed above 65 KIAS, the mode engages on the pitch axis. Pilot Flying is in charge
of the power setting.
If IAS, GSPD or HOV mode are engaged, ALT engages on the collective axis.
Basically this mode neither requires IAS, GSPD nor HOV to be engaged.
The AFCS uses a master ADC (if on the RCU, ADC is on N) to command the aircraft's altitude. For the pilot
sitting on the other side, slight differences between the 2 ADC’s can lead to ALT bug position and altitude
differences. It’s important to clarify which side (1 or 2) is master to take into account the slight altitude
differences. They shouldn’t be more than 60 ft.
Once engaged ALT label is displayed on the AFCS strip in green and a green reference bug is displayed on
the PFD altitude zone at the present altitude.
Several safety protections are implemented in the software:
A Ground Proximity protection (on a flat terrain or with a slight slope) is available:
In case of a descent, using V/S or IAS, the mode automatically reverses to ALT to level off at an
altitude corresponding to 150 ft radalt.
To obtain a target 150 ft radalt, the corresponding baro-altitude must be defined before the level-off
reversion to ALT. The correspondence between radar height and baro-altitude is computed
assuming the terrain is flat from the reversion to ALT position to the final altitude stabilization. At
the moment the reversion takes place it cannot be predicted if obstacles or terrain upslope lie ahead
of the aircraft. Nevertheless, during the first minute following the reversion to ALT, the ALT bug will
be updated in climb to comply with the 150 ft radalt reference, if the slope is not steep.
With GS mode, ALT mode will automatically engage and level off to target an altitude corresponding
to 80 ft radalt. In the same manner, during the first minute following the reversion to ALT, the ALT
bug will be updated in climb to comply with the 80 ft radalt reference. Usually the runway slope is
limited; the EC225/725 will then slightly climb.
Altitude reference cannot be beeped below equivalent height of 30 ft radalt.
ALT reference changes using the collective beep trim, whether ALT is indicated on longitudinal or vertical
axis, and results in commanded rates of climb or descent limited to 500 ft./min (1000 ft./min for EC 725)
when airspeed is above 40KIAS, reducing linearly to 200 ft/min at 25 KIAS and below.
Revision 1 2014-11-14 page 31 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
Airspeed limitations:
If ALT is engaged on the pitch axis with insufficient power, the aircraft will tend to slow down. Before
60 KIAS, IAS mode is automatically engaged slightly above this value, to stop the speed reduction,
shifting ALT mode on the collective axis, allowing the AP to take over and increase the collective
pitch to maintain the selected altitude.
Aircraft coupled with IAS and ALT modes, IAS bug pre-set to the Vne, AFCS is limiting the power at
MCP. If ALT mode is released, there is an automatic change of IAS to the current speed in order to
avoid the aircraft accelerating to the Vne, nose down. The aircraft will roughly maintain altitude.
If collective mode is not available, ALT mode reverts to amber and IAS is limited to 60 kt as a
minimum.
Attitude limitation:
Pitch attitude is limited within -12° to +14°.
Power limitations:
AFCS uses an upper power limit at TOP below 45 kt and MCP above 65 kt. Between 45 and 65
KIAS, power limit will decrease linearly down to Maximum Continuous Power.
Upon reversion to OEI, the crew selection, HI, LO, CT is applied.
When flying with ALT mode engaged on pitch, should one engine fail, IAS mode automatically
engages shifting the ALT mode to collective axis.
Bottom torque limitation:
AFCS doesn’t lower the torque below 10% total in order to avoid NR/N2 de-synchronization.
5.6.2. It doesn’t work (ALT):
Loss of pitch axis and loss of collective axis.
Complete loss of barometric altitude for at least 10 sec.
Complete loss of air speed for at least 10 sec if collective axis is not available.
Engagement of ALT.A, VS, GS, CR.HT, GA or HHT mode disengages ALT mode.
Engagement of IAS or GSPD mode shifts the ALT mode to the collective axis.
Revision 1 2014-11-14 page 32 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5.6.3. Summary of ALT mode displays
ALT on AFCS strip is always green. There is not an armed mode for ALT.
Upon pilot’s override against the spring or force trim release on an axis, label color toggles between
amber and green
When AFCS detects a discrepancy exceeding 80 ft for more than 2 seconds, it sends an excessive
deviation indication to the AFCS strip.
Every reference change is associated to a white flashing underlining of the ALT label together with a
white-green flashing of the bug.
ALT label color turns to amber when AFCS detect a loss of confidence at sensors.
ALT label flashes in amber inverse video upon complete loss of barometric altitude until mode
disengagement.
When the mode is about to disengage because of a complete loss of IAS or a collective axis
unavailability, ALT label flashes in amber inverse video until mode disengagement.
ALT mode turns to steady amber, when engaged on the collective axis, in case of anomaly detected
in the First Limit Indication (FLI) data. That calls for pilot monitoring of the power setting.
ALT label turns to amber before when shifting from 3 to 4 axes at 60 KIAS.
In case of a failure of the altitude data or a total failure of the sensor providing the altitude data (ADC1,
ADC2 or ISIS), a message consisting of the name of the failed sensor ADC1, ADC2 or BACKUP is
displayed.
Figure 23: Attitude indicator with ADC failure
Revision 1 2014-11-14 page 33 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5.7. VS: VERTICAL SPEED HOLD MODE
The VS mode maintains the current vertical speed upon engagement or acquires a pre-selected reference.
5.7.1. How it works (VS):
With VS mode engaged, AFCS controls either the pitch attitude or the collective lever.
The reference is synchronized to the current vertical speed at the time of the engagement within a range of
± 2200 ft/min, depending on the airspeed (see chart below). If the helicopter rate at the engagement is
higher, AFCS reduces the VS to the value on the chart according to the airspeed.
If V/S is pressed alone at airspeed below 60 KIAS, the mode engages on the collective axis and shifts
automatically to the pitch axis when the airspeed exceeds 65 KIAS for at least 5s.
If the airspeed is above 65 KIAS, the mode engages on the pitch axis.
If either IAS, GSPD or HOV are engaged, V/S engages on the collective axis, Then, as long as the air
speed is higher than Vy, priority is given to the VS mode in case the simultaneously IAS and VS objectives
would require more power than the maximum allowed (MCP).
Figure 24: VS limitation function of indicated airspeed
Once the V/S mode is engaged, turning VS FCP’s knob changes the reference by 50 ft/min per notch.
Reference can be modified also via the collective trim at the rate of 600 ft/min/sec. During acquisition of a
new reference, aircraft’s vertical acceleration is limited to less than 0.1G.
Same limitations and protections ALT mode apply for maximum power limitation and bottom torque limit.
The mode reverts to ALT automatically to level off at an altitude corresponding to 150 ft radalt.
There is an automatic reversion from GA to V/S after 15 sec when GA is engaged after 30 KIAS or after 25
sec when GA is engaged from the hover.
5.7.2. How to use it (VS):
VS mode can be PRESET + ENGAGED, or directly ENGAGED. Only the rate of climb or descent is
controlled by the AFCS, level off at the desired altitude shall be manually performed by the pilot flying by
reducing the VS and engaging ALT. A more efficient technique shall be preferred, using ALT.A (altitude
acquisition) mode.
When using VS on pitch axis, power adjustment must be anticipated to avoid important airspeed changes,
introducing confusion in the cockpit.
Revision 1 2014-11-14 page 34 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
Turning any VS FCP’s rotary switch will display a cyan bug on the FND. This pre-selection can be cancelled
in flight upon any pilot action on his upper modes disconnect button for at least 1 sec.
Pressing VS engages the mode. V/S label is displayed in green on the AFCS strip, VS bug turn green.
Further VS change is possible using either FCP switch or Collective beep trim.
To set a precise rate of vertical speed, it is advisable to use FCP switch rather than Coll. Beep Trim.
Maximum VZ depends on the IAS, following the above chart. (Vortex protection at low IAS).
When the helicopter approaches the ground with any rate of descent, the VS mode will
anticipate a level off according to the rate of descent, and then reverts automatically to the
ALT mode at an equivalent of 150 ft radalt.
When the vertical speed is established, a numerical black shaded value of the vertical speed in
hundreds of feet per minute is displayed just above or below the needle using one or two
digits.
When ALT A. (Altitude acquisition mode) is used, VS will be forced in green. When climb or
descent is anticipated, if the level off altitude is given prior to climb / descent, it is preferable to
use the ALT A. mode.
The mode can be activated automatically by TCAS II – ACAS when installed.
5.7.3. It doesn’t work (VS):
Complete loss of barometric altitude for at least 10 sec.
Complete loss of air speed for at least 10 sec if collective axis is not available.
Engagement of ALT, GS, CR.HT, GA, TDN or HHT (SAR option) modes disengages VS mode.
Engagement of IAS or GSPD modes shifts the VS mode to the collective axis.
5.7.4. Summary of VS mode displays
V/S on AFCS strip is displayed in green. There is no armed mode for VS but the bug may be pre-set
on the vertical scale, using the rotary switch.
Upon pilot’s override against the spring or force trim release on an axis, label colour toggles between
amber and green
V/S label color turns to amber when AFCS detect a loss of confidence at sensors.
V/S label flashes in amber inverse video upon complete loss of barometric altitude until mode
disengagement.
When the mode is about to disengage due to a complete loss of IAS and a collective axis
unavailability, V/S label flashes in amber inverse video until mode disengagement.
Every reference change is associated to a white flashing underlining of the V/S label together with a
white-green flashing of the bug.
V/S label turns to amber, when engaged on the collective axis, in case of anomaly detected in the
First Limit Indication (FLI) data. That calls for pilot monitoring of the power setting.
V/S label flashes in amber when shifting from 3 to 4 axes at 60 KIAS.
When AFCS detects a discrepancy exceeding 500 ft/min for more than 5 seconds, it sends an
excessive deviation indication to the AFCS strip.
Revision 1 2014-11-14 page 35 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5.8. ALT.A: ALTITUDE ACQUISITION MODE
The ALT.A mode acquires and holds a pre-selected altitude upon engagement. ALT.A label is then displayed on the
AFCS strip in cyan, below a green V/S label.
5.8.1. How it works:
With ALT.A mode engaged, VS will automatically engage in green. The AFCS controls either the pitch
attitude or the collective lever according to the airspeed at engagement.
Depending on the airspeed and the actual vertical speed, AFCS first computes and displays a vertical speed
complying with the following chart. If the current rate of climb is above +1000 ft/min or the current rate of
descent is below -500 ft/min (-1000 ft/min for EC725), the ALT.A will keep the current value.
Figure 25: ALT.A limitation function of Airspeed.
Within a range of 300 ft of the reference altitude, AFCS reverts to ALT mode.
The mode may be engaged for climbing or descending but:
The VS cannot be forced to show an opposite sign of the ALT.A reference.
Same limitations and protections as for the VS mode apply, with same priority management with respect to
available power and simultaneous engagement of IAS as in ALT or VS modes.
5.8.2. How to use it (ALT.A):
ALT.A mode is used as a PRESET + ENGAGED.
Altitude pre-selection shall be crosschecked between pilots before being engaged and any time
a modification is applied. Approaching the level off shall require attention from PF. If
altimeter setting is changed during the climb or descent, the bug will show the same altitude. ALT.A is the
preferred vertical mode to climb or descent at altitude when selected on the collective pitch (4 axes)
associated with IAS mode.
Turning ALT.A knob pre-selects an altitude. This pre-selection can be cancelled in flight upon any pilot
action on his upper modes disconnect button for at least 1 sec.
Pressing ALT.A engages the mode. ALT.A is armed in cyan underneath V/S in
green on the AFCS strip. V/S
ALT.A
The software is designed to avoid increasing the rate of descent during the last 300 ft,
Revision 1 2014-11-14 page 36 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
after ALT capture.
The vertical speed rate can be modified via collective beep or FCP’s VS rotary switches, but when an ALT.A
has been selected to climb, the VS mode cannot be reduced below VS = +50 ft/min. When engaging ALT A.
to descent, the pilot will be unable to set a VS higher than -50 ft/min.
The system will maintain aircraft speed between 60 kt, by engaging automatically IAS on the pitch axis if
necessary, and the VNE.
After pre-selection, if the mode is not engaged, when entering a ± 350 ft
window around the ALT.A reference, ALT.A value flashes in cyan inverse
video.
After pre-selection but the mode not engaged, in order to clear the ALT.A
value move the ALT.A bug close to ALT mode reference (within 150 ft.) for at least 1 second. Alternatively, a
1sec press on the Upper mode decouple button on the cyclic grip switches off the pre-selected altitude
whether the aircraft is in ground logic or in flight.
Pressing the ALT.A without prior pre-selection, ALT mode engages at the current altitude after a 10s delay.
5.8.3. It doesn’t work (ALT.A):
Same reason as ALT mode.
Engagement of ALT, VS, GS, CR.HT, GA, TDN or HHT modes disengages ALT.A mode.
Engagement of IAS or GSPD modes shifts the ALT.A mode to the collective axis.
5.8.4. Summary of ALT.A mode displays
Same as VS mode with ALT.A cyan label displayed below V/S in green on the AFCS strip.
Digital value of selected reference is displayed in cyan above FND altitude scale.
Revision 1 2014-11-14 page 37 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5.9. IAS: INDICATED AIR SPEED MODE
The IAS mode maintains the current indicated airspeed upon engagement or acquires and holds a pre-
selected indicated airspeed.
5.9.1. How it works (IAS):
IAS mode is controlled on the pitch attitude.
Upon direct engagement by pressing any FCP IAS knob, reference is synchronized to the current indicated
airspeed between 30 kt and the VNE.
Once the mode is engaged, turning one notch on the knob changes the IAS by 1 kt. IAS reference can be
modified using the cyclic beep trim, up and down, at a rate of 8 kt per second of beep application.
IAS engages automatically after 15 sec. (25 sec. when engaged from hover) on reversion from GA or TUP
mode (SAR mode).
Overriding against the spring or using force trim release has no effect on the reference.
To acquire a new IAS, aircraft’s acceleration or deceleration is limited to 2 kt/second for large airspeed
change (minimum 10 kt) and 1.3 kt/s otherwise.
Limitation of use and protections:
IAS cannot exceed the VNE and is limited to a minimum of 30 kt. If engaged outside those limits, the
IAS mode will set the airspeed reference at the closest limit.
The commanded pitch attitude is limited between -12° and +14°.
On the EC225LP, operating the IAS mode without vertical mode, ALT mode will automatically
engage to level off at an altitude corresponding to 150 ft radalt..
On EC725, operating the IAS mode without vertical mode activates a potential FLY-UP protection
intended to prevent the aircraft from descending below the highest DH minus 80 ft, with a minimum
at 40 ft of radalt. However, in OEI operation this FLY-UP protection is inhibited, hence no protection
from the ground is active anymore in 3-axis IAS mode and OEI.
5.9.2. How to use it (IAS):
IAS mode can be PRESET + ENGAGED, or ENGAGED.
PRESET + ENGAGED: rotating any FCP’s IAS mode knob to pre-selects an IAS. IAS bug is displayed in
cyan on the FND.
If the bug is out of scale, an alphanumeric display recalls the value.
This pre-selection can be cancelled in flight upon any pilot action on his upper modes
disconnect button for at least 1 sec.
ENGAGED: pressing any FCP’s IAS mode knob engages the mode. IAS label is
displayed in green on the AFCS strip and the bug turns into green color. Minimum
indicated airspeed must be above 30 KIAS to allow engagement of the IAS mode.
VTOSS cyan line can be raised on the FND airspeed scale , aircraft on the ground, by
pressing and maintaining the rotary switch on FCP for at least 0,5 s and, at the same
Revision 1 2014-11-14 page 38 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
time, beeping up or down the pitch trim on the cyclic (above the minimum value calculated by the system). If
out of the IAS scale, a blue alphanumerical value is displayed.
VTOSS value is reset to minimum VTOSS after take-off, when airspeed is above Vy.
When flying with vertical modes (ALT, ALT A., VS, or G/S) engaged on the pitch axis, if airspeed drops
below 60 KIAS, the IAS mode automatically engages.
5.9.3. It doesn’t work (IAS):
Airspeed invalid for at least 10 seconds
Complete loss of air speed for at least 10 seconds
GA, TUP, TDN, HOV or GSPD modes disengage IAS mode
If collective trim is not available, engagement of ALT.A, ALT, VS or GS mode disengages IAS mode.
5.9.4. Summary of IAS mode displays
IAS label is displayed in green color when engaged, on the AFCS strip longitudinal side (pitch axis)
Upon pilot’s override against the spring or force trim release on pitch axis, label color toggles
between amber and green.
IAS label color turns to amber when AFCS detect a loss of confidence at sensors.
IAS label flashes in amber inverse video upon loss of air speed signal until mode disengagement.
When AFCS detects a discrepancy exceeding 12 kt for more than 2 seconds, it sends an excessive
deviation indication to the AFCS strip.
Every IAS reference change is associated to a white flashing underlining of the IAS label together
with a white-green flashing of the bug.
In addition to the airspeed indicator, a speed trend indication is provided to the crew
which points from the helicopter reference to the forecast airspeed on the
airspeed scale that will be reached in 5 seconds. This speed trend indication is a
vertical yellow line of variable length computed according to the value of the
forecast airspeed 5 seconds ahead, showing the “efficiency” of the nose attitude
change, allowing very precise inputs from the pilot flying.
Revision 1 2014-11-14 page 39 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5.10. G/S: GLIDE SLOPE MODE
The G/S mode acquires and holds the descent path associated to an ILS frequency.
5.10.1. How it works:
AFCS controls either the pitch attitude or the collective. Coupling can be performed either on FNDs or
NAVDs coupler as long as the navigation source is set to ILS1 or ILS2.
GS mode requires an ILS frequency to be tuned.
G/S mode cannot be coupled if the LOC mode is not already captured.
Minimum IAS for engagement is 35 kt.
The system is able to discern between a VOR and an ILS frequency.
There are 2 types of status: ARMED, and CAPTURED.
ARMED: Occurs if the LOC mode is armed or engaged and the capture conditions are not met. The GS
label is cyan on the AFCS strip. The engaged vertical mode (i.e. ALT mode) remains active until LOC
capture, allowing the G/S to capture.
CAPTURED: The mode is allowed to change to capture if the GS deviation is valid and if the glide bug at
the bottom of the centre is less than 2.2 dots for at least 1 sec or if the glide bug above the centre is less
than -0.7 dot for at least 3 seconds. Then the last condition to switch to capture is to be capture on LOC
(LOC mode is green) and if GS deviation is within 2.05 dots and -0.3 dots. The GS vertical bug turns from
magenta to green color.
After G/S mode is captured, Collective beep is inhibited.
If ILS1 and ILS2 frequencies are different, AFCS indicates the loss of redundancy by reverting GS and LOC
labels to amber.
If both GS deviations are valid but differ by more than 0.25 of a dot for at least 0.5
second, AFCS changes GS label to amber and displays a discrepancy arrow.
Limitations of use and protections are the same than ALT mode except:
The mode changes automatically to ALT mode for a level-off at an altitude corresponding to 80 ft RADALT,
then ALT reference cannot be lowered below an equivalent height of 30ft
In case of Radio Altimeter failure, GS mode is still available and can be armed and capture when GS signal
is received, when capture, the GS mode will be amber on AFCS strip, showing a degraded status as the
change to ALT based on a 80 ft signal from RADALT is missing.
In this case, pilot has to take control manually of the collective pitch to level-off the aircraft above the
runway.
Excessive deviation:
If GS deviation exceeds 2.2 dots for more than 0.6 sec during the first 30 seconds following the mode
capture and then 0.7 dots for more than 0.6 sec, an excessive deviation caution is sent to the pilot (blinking
amber chevrons around GS label).
If GS deviation exceeds 2 dots (h/c above the glide slope) following the “clear of conflict” condition (TCAS
II), ALT is automatically engaged to level off the h/c.
5.10.2. How to use it:
Revision 1 2014-11-14 page 40 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
The approach must be flown with G/S and LOC and IAS modes engaged when no discrepancy affect the
AFCS, thus the final approach is performed with G/S on the collective axis
The GS mode is automatically armed with the LOC by pressing NAVD or FND coupler on the FCP, after
selecting an ILS frequency on the corresponding display.
The Glide slope bugs displayed on the MFD's are magenta when armed and green when captured.
Figure 26: GS on the FND
5.10.3. It doesn’t work:
Check the frequency.
Airspeed is below 35 kt.
LOC is not armed / captured
After 10 sec upon disengagement of LOC mode.
Engagement of ACAS takes precedence over GS. ACAS LOC1 ACAS
Engagement of GA mode inhibits GS.
Engagement of ALT.A, VS, ALT, CR.HT, GA or HHT modes disengage GS mode.
Engagement of IAS mode shifts the GS mode to the collective axis.
If LOC is captured:
Loss of airspeed and ground speed for at least 10 sec.
Loss of barometric and GPS vertical speed for at least 10 sec.
Navigation source change for at least 10 sec.
Change of ILS frequency for at least 10 sec.
Loss of Glide Slope signal for at least 10 sec.
Revision 1 2014-11-14 page 41 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5.10.4. Summary of GS mode displays
GS1 or GS2: Captured, label is displayed in green GS1 GS2
Armed, label is displayed in cyan GS1 GS2
Note: In case of ALT.A use, GS1 GS2 will be temporarily replaced by ALT.A but G/S mode is still
armed.
Following a navigation source or a frequency change, the GS label flashes in inverse video for a
maximum time of 10 seconds, if LOC is captured.
Upon pilot’s override against the spring or force trim release on an axis, label color toggles between
amber and green.
For more than one dot of vertical deviation a double amber arrow is displayed around the h/c index.
It indicates the way of correction to come back on the glide path.
Figure 27: GS display with vertical deviation.
GS label color changes to amber when AFCS detects a loss of confidence at sensors. i.e.: a loss of
radio altimeter signal will degrade the GS as the mode can still maintain the glide path but the mode
is unable to level off at 80 ft. This change of color is associated with a flashing amber rectangle
around the label for 10 seconds.
GS label flashes in amber inverse video upon loss of deviation signal until mode disengagement.
GS deviation is indicated on MFD’s by a magenta triangle when armed and a green triangle when
captured.
Revision 1 2014-11-14 page 42 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5.11. GA: GO AROUND MODE
The GA mode is used for missed approach, and during departure, allowing the h/c to climb and accelerate
in a safe manner considering Safety Speed and power available.
Whether in AEO or OEI, as long as the airspeed is higher than Vy, priority is given to the climb objective
once MCP is reached.
5.11.1. How it works:
The GA mode works with several different logics depending on the engines power available (AEO / OEI,
power margin) and helicopter airspeed at the moment of engagement.
All engines operative (AEO):
From the hover (except if HHT or TRANSDOWN are engaged, SAR modes): it acquires and holds a pre-
defined vertical speed of 1000 ft./min and Vy or a pre-selected IAS.
Anytime during the take-off and without releasing the hands from the controls, one click on the collective
grip GA pushbutton engages at the same time 2 modes, vertical and longitudinal.
From a missed approach: it acquires and holds a pre-defined vertical speed of 1000 ft/min or the current
vertical speed whichever the higher and Vy or the current speed, whichever the greater.
NOTE
Upon GA engagement the aircraft will commence a climb and roll wings level
when no guidance is engaged on Roll. If HDG or ANAV were engaged, those
modes will not disengage.
IAS will be engaged at Vy or current speed if above.
One engine failure (OEI real or training mode):
Below VTOSS, VTOSS is acquired then a VS is set depending on the available power (HI, LO, CT, stops).
Between VTOSS and Vy, current IAS is held, VS is set depending on the available power (HI, LO, CT,
stops). IAS shall be manually set, using cyclic beep or the IAS rotary switch.
At Vy and above, AFCS maintains the current IAS and sets a vertical speed, depending on the available
power (HI, LO, CT, stops). AFCS can reduce IAS to Vy.
The AFCS controls the pitch attitude and the collective axis.
The commanded acceleration varies in accordance with the available power. Below VTOSS, it will be 3.4
kt/sec, above VTOSS, it will be 2 kt/sec. In case of OEI, the acceleration below VTOSS is 4.93 kt/sec (to
reach VTOSS quicker for safety)
Following GA engagement, AFCS maintains the aircraft flight direction – track. (If no HDG or ANAV mode
engaged).
The limitations of use and protections are the same as IAS and VS modes except for the pitch attitude
reference range which is enlarged downwards to -16°, enabling the aircraft to accelerate faster.
Revision 1 2014-11-14 page 43 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5.11.2. How to use it:
The key word of this mode management is preparation before take-off:
check VTOSS in order to anticipate a possible OEI during T/O.
When correctly anticipated, GA will be useful AEO and OEI when engaged early at V1 for clear area
takeoff or on helideck takeoff.
GA will also give solid references when experiencing spatial disorientation in the weather, where GA
engagement will stabilize a climb, set a speed, and level wings at the best rate and appropriate value
according to the available power.
Anytime, AEO or OEI, pressing GA stops the descent and engages a positive rate of climb at the
current speed or Vy, whichever is the highest in AEO, or in OEI, at the current speed or VTOSS
whichever is the highest. After 15 seconds, the mode swaps to V/S and IAS. The mode leveling the
wings if HDG or ANAV mode were not previously engaged. During ILS approach, LOC and GS
captured, GA takes over and thus there is no more navigation.
With the AP Software version 9.61, GA only disengages the NAV mode when TDN is armed.
GA GA
Then after 15 seconds
V/S IAS
From hover, AEO, the GA mode manages a combination of rate of climb and acceleration to reach a
Vertical Speed of 1000 ft/min and the pre-selected IAS or at least Vy. After 25 seconds, automatically, VS
engages on the collective axis and IAS engages on the pitch axis. VS and IAS can be modified either on
any FCP or via collective and cyclic beeps.
NOTE
The reference of the V/S and IAS can be modified at any moment after depressing
GA pushbutton either using the FCP knobs or the cyclic and collective beep trims.
5.11.3. It doesn’t work:
Loss of collective axis leading to reversion to VS on the pitch axis above 55 KIAS or to reversion to
IAS below 55 KIAS.
Loss of pitch axis leading to a reversion to VS.
Complete loss of barometric altitude for at least 10 seconds commands the reversion to IAS alone.
The engagement of ALT.A, ALT, CR.HT, HT/HOV or GSPD modes disengages the GA mode.
G/S doesn’t disengage the GA mode.
Pressing the VS button commands the reversion to IAS alone.
Pressing the IAS button commands the reversion to VS alone.
Revision 1 2014-11-14 page 44 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5.11.4. Summary of GA mode displays
GA GA on the AFCS strip, on the longitudinal and collective axes.
Upon pilot’s override against the spring or force trim release on the pitch or collective axes, the
corresponding label color toggles between amber and green.
GA label color turns to amber when AFCS detect a loss of confidence at sensors.
GA label flashes in amber upon loss of barometric altitude until mode disengagement.
When AFCS detects that the computed trajectory upon mode engagement is not fulfilled, it sends an
excessive deviation indication to the AFCS strip.
Every reference change is associated to a white flashing underlining of the corresponding label together
with a white-green flashing of the bug.
GA GA
Revision 1 2014-11-14 page 45 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5.12. CR.HT: CAPTURE AND RETENTION OF RADAR HEIGHT MODE
The CR.HT mode acquires and holds a pre-selected radio height. The use of CR.HT mode is recommended
only over a flat surface like a lake or the sea.
CAUTION
The use of CR.HT mode is forbidden in IMC above land.
On EC 225 without SAR modes, the use of CRHT mode combined with GSPD mode
is forbidden for airspeed below 30 KIAS.
5.12.1. How it works:
All h/c 225
When CR.HT is engaged, the AFCS controls the collective axis.
Upon first pre-selection, the initial CR.HT reference is the current height (within the limits).
The CRHT reference cannot be lower than the highest DH.
CRHT envelope: Height selection is between 2450 ft down to the highest Decision Height (DH).
H/c 225/725 equipped with SAR modes:
Reversion from “Trans Up” to CR.HT mode.
Upon first H.HT reference pre-selection without prior CR.HT pre-selection, the CR.HT reference is either the
current height or 300 ft., whichever the highest.
To be sure that the aircraft will not descend during “Trans Up” mode, the CR.HT reference must be higher
than the HHT reference. Consequently, if the CR.HT reference was lower than the H.HT reference upon
TUP engagement, CRHT is set at either 300 ft. radalt or the H.HT reference or the current height, whichever
the higher.
Limitations of use and protections:
Excessive deviation:
Excessive deviation symbol is displayed if the aircraft’s actual height and CR.HT mode reference deviation
exceeds a threshold of 15ft for at least 2 seconds. Pilot shall monitor how the AFCS corrects the error and
check the deviation is decreasing. Do not “help” by manually overriding the mode.
Fly up:
A Safety Limit is associated to the CRHT reference: 30ft below the CRHT reference or 200 ft if CRHT is
above 230 ft radalt.
If the aircraft happens to fly below this safety limit heights, the collective trim increases the collective
position, until the helicopter is back on the CR.HT reference value. FLY-UP appears on the AFCS strip-
collective axis.
Revision 1 2014-11-14 page 46 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5.12.2. How to use it:
After verifying or setting the appropriate DH value, select a radio
CRHT 79 CRHT 79
height reference, using any FCP CR.HT knob.
CR.HT and the numerical value are displayed in cyan on the
FNDs/Altitude zone.
Pressing the CR.HT knob engages the mode.
Once the mode is engaged, CRHT can be modified via the collective
beep at a rate of 25 ft/sec or via any FCP knob at 10 ft per notch.
When FLY-UP engages, the h/c is commanded to automatically climb
away from the protection zone by an optimal combination of pitch and
collective inputs, in addition, the AFCS is limited in power, MCP or
TOP according to the airspeed, incremented by 10% as long as the
FLY-UP is active.
5.12.3. It doesn’t work:
If CR.HT is engaged below DH, it won’t be possible to lower the reference bug.
Loss of collective trim actuator or trim feel set off.
Complete loss of radio height for at least 10 seconds.
The engagement of ALT, ALT.A, VS, GS, H.HT or TDN modes disengages the CR.HT mode.
5.12.4. Summary of CR.HT mode displays
CR.HT label is displayed in green on the AFCS strip, on the collective column.
Upon pilot’s override against the spring or force trim release on the collective axis, the label color
toggles between amber and green.
Every CR.HT reference change is associated to a white flashing underlining of the CR.HT label
together with a white-green flashing of the bug and the alpha-numerical value.
CR.HT label color turns amber when AFCS detects a loss of confidence in primary sensors.
CR.HT label flashes in amber inverse video upon loss of radar height signal for up to 10 seconds
until mode disengagement.
When AFCS detects that the computed trajectory upon mode engagement is not fulfilled, it sends an
excessive deviation indication to the AFCS strip.
When flying below the protection height, a red “FLY-UP” label replaces CR.HT label on the AFCS
strip until the aircraft is back to the CR.HT reference. The system will limit power to the appropriate
power rating limitation.
An additional amber indication case for CR.HT label is an anomaly in the engines data that warns
the pilot for monitoring the power setting.
Revision 1 2014-11-14 page 47 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5.12.5. GSPD: Standard Ground Speed mode
Standard GSPD mode holds current ground speed upon engagement (single click) or acquires and holds
zero ground speed upon a double click. The best use of the GSPD is to automatically keep references on
the lateral and longitudinal modes during hover IGE / OGE in poor visibility, whiteout, brownout, dark night.
5.12.6. How it works:
The AFCS needs new AP software (at least version 9.51) and a modification of the FDS (version 5.10 or
higher) so that the Hover page is available on the FNDs.
System uses a GPS model 3024 or 5024 for primary reference.
The AFCS controls the pitch and the roll axes.
The horizontal accelerations are taken from the AHRS.
It can be associated with any vertical mode, H.HT (SAR mode), VS, ALT A., ALT or CR.HT (for CR.HT,
speed must be above 30 KIAS)
Limitations of use and protections:
Attitude: limited within -12° and +14° on Pitch axis, ± 15° on roll axis.
Rates: Pitch rate is limited to ±5°/sec, the Roll rate is limited to ±7°/sec.
Maximum Ground speeds are within: -10 kt and +50 kt on longitudinal axis and ± 20kt on lateral axis.
5.12.7. How to use it:
For all EC225 / 725 with and without SAR option, GSPD mode engagement / disengagement is as
follow:
Prior to engage GSPD mode, set PF’s FND with Hover display to visualize the actual lateral and longitudinal
groundspeeds ( GSpeed longitudinal only can be read on FND airspeed scale or on NAVD)
GSPD mode is engaged by pressing once the GSPD button on any cyclic grip.
One click maintains current speed as a reference, if the ground speed is ≤ 50kt.
Another later click disengages the mode. Above 50 kt, one click engages GSPD at a
ground speed of 50kt.
Whether GSPD was engaged or not, a double click on GSPD button will activate the
acquisition of a zero longitudinal and lateral speed, This will reflect on, the FNDs Hover
display, with the GSPD green ellipse back centered on the brown groundspeed target
The GSPD reference is indicated by a green ellipse displayed on the hover page on
the FND.
Figure 28: Cyclic grip – GSPD button.
If out of scale, the longitudinal and lateral AFCS GSPD target will be displayed in alphanumerical format
around the h/c mock-up until green ellipse is visible (see figure below)
Revision 1 2014-11-14 page 48 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
Figure 29: FND HOVER mode (1)
GSPD mode reference can be adjusted with different techniques to fit pilot needs:
A smooth and precise change on lateral and/or longitudinal speeds: using cyclic beep trim, with this
technique, the beep trim commands an cceleration in the beep direction, longitudinal or lateral.
When beep is released, the acceleration stops and the new ground speed is held.
A change of lateral and / or longitudinal speeds using stick + beep technique will allow the pilot to
manually set a new groundspeed using the cyclic, then when applying the beep trim on this modified
groundspeed will immediately change the reference (green ellipse position).
A temporary modification of the aircraft parameters: using cyclic force trim release, parameters will
change with pilots inputs, and the mode will only apply the lateral and longitudinal parameters at the
time the force trim is released: this method must not be used as primary technique, as inaccurate
parameters due to cyclic over control may be set on all lateral and longitudinal references.
Figure 30: FND HOVER mode (2)
As there is no control of altitude, it is recommended to use ground speed mode with a vertical mode like
H.HT (SAR variant), ALT, CR.HT engaged (see caution).
CAUTION
For SAFETY reason, the use of GSPD mode combined with CRHT mode is prohibited
for IAS below 30 kt on EC225 not SAR variant.
The GSPD mode may be engaged in combination with ALT during the final phase of an offshore approach
where precise groundspeed is required, to provide additional stability and protection. During helideck take-
off, just after lift-off phase and stable in hover over the helideck, the GSPD mode engagement at zero speed
(double click), helps maintaining the aircraft's position, and reduces pilot workload.
Revision 1 2014-11-14 page 49 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5.12.8. It doesn’t work:
Pressing once the button to engage the mode engages the GSPD mode. Then, after a short delay, a
second press would disengage the mode. To avoid confusion, after action on GSPD pushbutton, check
AFCS strip for GSPD engagement / disengagement.
Complete loss of ground speed info from the sensors, for at least 30 seconds.
The engagement of IAS, GA, HDG, NAV, VOR, LOC, HOV, TDN or TUP modes disengages the mode.
NOTE
In EC225, the GSPD mode uses GPS velocities, provided in North/East axes. To
compute in aircraft's axes, the mode needs valid heading information. Otherwise, a
heading error will result in GSPD mode oscillations. So, it should be checked the
heading is correct before engaging the GSPD mode.
5.12.9. Summary of GSPD mode displays
Xxxxxxxxx GSPD GSPD is displayed on the AFCS strip
Upon pilot’s override against the spring or force trim release on an axis, the relevant label color toggles
between amber and green. As soon as the pilot stops overriding against the spring, the AFCS modifies the
aircraft attitude to comply with the GSPD limits.
E.g. if the pilot overrides GSPD rearward faster than 10 kt (nose up attitude), after releasing pressure on the
cyclic, AFCS will command the aircraft to a nose down attitude in order to recover the reference.
(It is important to be aware of this especially at night):
NOTE
Overriding an AFCS mode shall not be considered as “Helping the AFCS mode”.
When such action is performed, it is a “high priority” manoeuvre performed by the
pilot for safety purposes for example traffic/obstacle avoidance.
Label’s color turns amber when AFCS detect a loss of confidence in sensors.
Xxxxxxxxx GSPD GSPD
Upon loss of primary sensors (ground speed sensing), the relevant labels flash in amber inverse video until
mode disengagement.
Xxxxxxxxx GSPD GSPD
When AFCS detects that the computed trajectory upon the mode engagement is not fulfilled, it sends an
excessive deviation indication displayed on the AFCS strip.
The groundspeed reference is a green ellipse on the FND’s hover page. Every reference change is
associated to a white blinking underlining of the GSPD label together with a white-green blinking of the
reference circle:
xxxxxxxxxGSPD GSPD
Revision 1 2014-11-14 page 50 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5.13. OPTIONAL TCAS II MODE: ACAS
The ACAS mode is designed to allow an automatic arming based on traffic relative situation, followed by an
automatic engagement of the mode for avoidance manoeuvre based on intruder’s threats. The AFCS will
control the vertical axis, even if no upper mode was previously engaged. If other modes were engaged, the
ACAS mode has priority over any previous vertical mode and supersedes it. By default the mode is always
active unless the pilot decides to manually cancel the mode's activation.
5.13.1. How it works:
The ACAS mode is part of a system comprising a TCAS II TTR4000, updated AP software 9.61 and
updated FDS software 5.11. The system is fully explained in a separate Briefing Note.
The ACAS mode is automatically armed when the detected traffic is classified as intruder. AFCS previous
modes are still engaged, ACAS is displayed in cyan / over white background in the armed modes strip.
Figure 31: ACAS armed – traffic is intruder.
When the intruder becomes a threat, a resolution advisory (RA) is set, ACAS mode is automatically
engaged. The ACAS mode performs a vertical avoidance manoeuvre based on the resolution displayed on
the Instantaneous Vertical Speed Indicator (IVSI), using collective and pitch attitude, respecting the aircraft
limitations.
flashing with
Figure 32: Resolution advisory – display on IVSI.
The ACAS mode is also associated to aural warnings processed by the TCAS II and transmitted via the ICS.
Revision 1 2014-11-14 page 51 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
The pilot can disarm the ACAS mode, when automatically armed (cyan on lower strip), by pressing on the
cyclic stick upper modes disengagement button for at least one second, the ACAS armed mode will
disappear but active upper modes remain engaged in green status.
When ACAS is engaged, the pilot can disengage by pressing on the cyclic stick upper modes
disengagement button, either shortly or for at least one second. A short press will disengage ACAS and all
previous modes, whereas a long press will only disengage ACAS.
Figure 33: Cyclic grip – upper modes disengagement.
Limitations of use and protections:
Air speed limitation: same as VS. Protection to stay between 60 Kt and Vne
Attitude limitation: same as VS: -12° to + 14°
Power limitation: same as VS: TOP below 45 Kt, MCP above 65 Kt.
Bottom Torque limitation: same as VS: 2 x 5%
Excessive deviation: no excessive deviation signal is displayed to the pilot during ACAS engagement.
Specific reversion to vertical mode: the "clear of conflict" condition returns to previous mode, if any, or ACAS
mode reverts to V/S mode with a green bug set at 0 ft/min. If the aircraft was previously in ILS approach and
the glide slope deviation is above 2.0 dots (h/c above the glide path), ALT mode automatically engages to
level off.
Height limitation: If the helicopter descends below 700 ft AGL, the ACAS mode disengages and reverts
automatically to the formerly engaged vertical mode, if any, or to VS mode with a reference set to 0 ft/min.
5.13.2. How to use it:
For the AFCS, the ACAS mode will be automatically activated as long as the TCAS II equipment and the associated
inputs are on and available (Transponder, ADC2, AHRS2, Radio Altimeter).
The pilot has always the option to perform the avoidance maneuver manually by disarming or
disengaging the system.
Refer to the TCAS II Flight Operations Briefing Note.
Revision 1 2014-11-14 page 52 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
5.13.3. It doesn’t work:
TA ONLY
Check if you are not in TA Only mode:
In case of Single Engine Failure, Real or training, set to TA ONLY.
In case of failure of ADC2, ACAS is forced to fail. A
C
ACAS A
S
In case of failure of RA or Transponder, ACAS is forced to fail.
Check if ACAS is not on mute.
TAWS warnings take precedence over ACAS advisories. When a TAWS warning is active, ACAS aural
annunciations are inhibited, ACAS will automatically switch to the TA-only mode of operation. ACAS will
remain in TA-only mode for 10 seconds after the TAWS warning is removed.
5.13.4. Summary of ACAS mode displays:
Armed mode:
Steady cyan over a white background
Engaged mode:
Flashing red on a black background for 800 ms, and inverse video white over red background for 400 ms.
Revision 1 2014-11-14 page 53 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
6. OPTIONAL SAR MODES
6.1. HT/HOV: HOVER HEIGHT HOLD MODE
HT/HOV mode acquires and holds a pre-selected hover height (H.HT) and a pre-selected ground speed
reference (HOV) set on thumb-wheels on pilot and HHO (Helicopter Hoist Operator) panels.
When engaged in cruise the HT/HOV mode is able to coordinate descent and speed reduction along a 4.5°
slope, also named Autonomous Transition Down. This mode allow the PF to transition at other heading than
into the wind, but in a manually defined final course due to obstacles.
6.1.1. How it works:
The AFCS controls the pitch, the roll and the collective axes.
SAR configuration requires ground speed data. These data may be provided by a GPS model 3024 or 5024,
Doppler, INS sensors, depending on aircraft configuration.
There are 2 different cases representing the flight status, Hover or cruising flight.
– The mode holds a hover height
1. Turning any HT/HOV rotary knob pre-selects a radar height. The preset H.HT label and the
numerical value are displayed on the FND: cyan is the preselected code, green when engaged.
2. If there is no time for preparation, pressing HT/HOV will engage the mode with a H.HT reference set
at the current height or 100 ft. whichever the lower. If this HHT is already lower than the highest DH,
the HHT reference cannot be lowered, but raising H.HT is permitted by the system.
Pressing the HT/HOV rotary knob on any FCP engages the mode.
AFCS strip displays these labels: H.HT HOV HOV
Hover Height can be modified using either HT/HOV rotary knob or a collective beep trim at a beep rate of
2.5 ft/sec.
70 70
0
Figure 34: Radio0 altimeter – Preset HHT (left figure) / engaged HHT (right).
3. The H.HT reference is no longer displayed after disengagement or disarmament of all radar height
based mode (i.e CR.HT, H.HT and TDN modes).
Lateral and longitudinal speed changes can be done:
Temporary changes are limited to 5 kt, using cyclic beep trim or 10 kt, using winch man joystick.
Permanent changes can be done using the pilot and the HHO thumb-wheels.
Revision 1 2014-11-14 page 54 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
NOTE
Attention shall be paid, as the ground speed references are the sum of the speed
references selected on:
- the pilot thumbwheels, plus
- the hoist operator thumbwheels, plus
- the hoist operator joystick.
If ground speed references are equal to zero, a pulse on the cyclic beep trim commands a 1 meter motion in
the relevant direction.
Transition down and hover flight.
AFCS performs a straight forward transition on the current heading to reach hover at the designated
reference height (disregarding the wind direction) .
Limitations of use and protections:
Attitude: limited within -12° and +14° on pitch axis, ± 15° on roll axis
Rates: pitch rate is limited to ± 5°/sec, roll rate is limited to ±7°/sec.
Excessive deviation: 10 ft below the reference and 20 ft if above the reference.
Pilot thumb-wheels are limited to: -10 kt and +50 kt on the longitudinal axis and ± 20 kt on the lateral axis.
Winch operator thumb-wheels are limited to: ± 10 kt lengthways and sideways
Below 10ft radalt, winch operator joystick and thumb-wheels are not taken into account.
The minimum recommended height for HT/HOV engagement is 22 ft in IMC or at night, over water.
FLY-UP mode engages when the height descends below the lowest value between 100 ft radalt and HHT
minus 20ft
6.1.2. How to use it:
The mode can be engaged without any prerequisites; nevertheless the key word is preparation.
Prepare a height to be held - H.HT + the value appear in cyan on the FND:
CR.HT engaged with a reference higher than the H.HT.
IAS > 40 kt (recommended).
The slope is 4.5° which is around 500 ft. per nautical mile. If the hover point is too close with a big height to
lose, aircraft is going to overshoot. As a rule of the thumb, one hundredth of the speed plus 0.1 Nm of
anticipation will give you the distance in Nm to a full stop, if the altitude is compatible. For example: at 80 kt
engage the mode at 0.9 Nm of the target.
At least one FND should be on Hover page to monitor the ground speed.
During the descent and the deceleration, the lateral cyclic beep modifies the track.
In case of losing the FMS in TDN, system reverts to HT/HOV with the last computation.
Use pedals if it is necessary to modify the heading reference in hover.
Use of thumbwheels pilots or HHO requires a good crew coordination. Thumbwheels shall be reset to 0/0
cockpit and cabin before engaging HT/HOV.
6.1.3. It doesn’t work
At least one DH is set above H.HT; in that case H.HT value cannot be lowered.
Altitude or radar height is too high to comply with the 4.5° descent slope.
Revision 1 2014-11-14 page 55 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
Complete loss of ground speed for at least 30 seconds.
Complete loss of radio height for at least 10 seconds.
H.HT mode is disengaged by: ALT, ALT.A, VS, GS, CRHT or TUP modes.
HOV mode is disengaged by: IAS, GA, HDG, NAV, VOR, LOC, GSPD or TUP.
6.1.4. Summary of HT/HOV mode displays:
H.HT HOV HOV
is displayed on the AFCS strip.
Upon pilot’s override against the spring or force trim release on an axis, the relevant label color toggles
between amber and green.
Labels color turn amber when AFCS detects a loss of confidence at sensors.
Upon loss of primary sensors, the relevant label becomes amber flashing in inverse video until mode
disengagement.
When AFCS detects that the computed trajectory upon mode engagement is not fulfilled, it sends an
excessive deviation indication to the AFCS strip.
Every reference change is associated to a white blinking underlining of the H.HT label together with a white-
green blinking of the bug and the alpha numerical value.
Figure 35: FND HOVER mode (3)
The hover speed reference is a green ellipse on the FND’s hover page. Every reference change is
associated to a white blinking underlining of the HOV label together with a white-green blinking of the
reference ellipse.
Figure 36: FND HOVER mode (4)
When flying below the protection height, a red “FLY-UP” label replaces H.HT label on the AFCS strip until
the aircraft is back to the H.HT reference with respect of the power limitation (MTOP).
An additional amber indication case for H.HT label is an anomaly in the engines data that warns the pilot for
monitoring the power setting.
Revision 1 2014-11-14 page 56 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
6.2. GSPD: GROUND SPEED MODE
GSPD mode is identical to the Standard Ground Speed with some additional capabilities.
6.2.1. How it works:
On SAR version, GSPD mode is the same as Standard Ground Speed for basic use.
When the mode is engaged combined with HHT but away from 3D hover (i.e. in cruise above 50 KIAS), it
coordinates the descent and the deceleration along a 4.5° slope.
H.HT GSPD GSPD
The ground speed references can be adjusted:
By the pilot, using cyclic force trim release or beep,
By the hoist operator, using thumbwheels or joystick.
Pilot’s thumb-wheels are not active.
The resulting ground speed references are limited between –10 kt and +50 kt for the longitudinal axis
respectively ± 20 kt for the lateral axis.
If a Doppler system is installed, there is a measurement check performed on the speed error in order to
warn the pilot, turning the modes labels into amber.
Keep in mind that with the software 9.43, pressing once the GSPD button on the cyclic stick, stops the
aircraft. During the deceleration/descent, after engaging HT/HOV, pressing GSPD button plus one click on
the cyclic beep trim will maintain the current ground speed. After the upgrade of a new software (9.51 or
9.61), the button action will be standardized.
6.2.2. How to use it:
Same use as Standard Ground Speed.
When the HT/HOVER mode is engaged and if the ground speed is within the limit, pressing GSPD button
and a short click on the beep trim will maintain the current ground speed and the transition down to the
selected radar height.
6.2.3. It doesn’t work:
Same operation as Standard Ground Speed.
6.2.4. Summary of GSPD mode displays:
Same displays as Standard Ground Speed.
Revision 1 2014-11-14 page 57 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
6.3. TDN: GUIDED TRANSITION DOWN MODE
The mode authorizes 2 types of guidance to the automatic hover:
A) When flying over a target, using F/TDN push-button on any FCP: this is the guided transdown, where the
H/C will be guided with the NAV mode and TDN armed, for a transdown into the computed surface wind and
an auto-hover over the F/TDN point.
B) When using the Hover function of the FMS under NAV mode: this is the other guided transdown, the
transdown mode is armed till reaching the TDN gate computed by the FMS. Then the TDN mode is
engaged as for a Fix Transdown facing the wind.
6.3.1. How it works:
The mode acquires and holds the hover at the HHT pre-selected and a distance of 0.1 Nm before the
designated point. There are 2 different phases.
1) Guidance/Navigation: during this pattern, the FMS delivers roll steering commands to bring the helicopter
nose up into the wind.
2) Transition down: when the aircraft is at the right distance, the FMS delivers the top of descent and the
AFCS coordinates the descent and the deceleration along a 4.5° slope, limited to 1000 ft/min of rate of
descent.
AFCS controls the pitch, roll and collective axes.
This mode requires that, at least, one of the navigation sources is configured on ANAV.
When the aircraft is over the target, pressing any F/TDN push-button configures both the AFCS and the
FMS to automatically perform the procedure.
Figure 37: NAVD guided transdown pattern.
The FMS stores the target coordinates and defines a guidance pattern leading to a Trans down
point. This point is computed to be far enough from the target to ensure that the 4.5° slope will be
respected, taking account of the engagement speed and wind force and direction.
Revision 1 2014-11-14 page 58 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
The AFCS is automatically coupled to the FMS via the NAV mode and the TDN is armed. The
pattern on the NAVD screen is displayed.
ALT ANAV IAS
TDN TDN TDN
Once the aircraft reaches the transition down point, it starts descending and reducing its speed.
TDN TDN TDN
In short final, when the speed representation can enter in the green circle of the hover page, the
mode reverts to HT/HOV mode, thumb-wheels, beep trims can be used and have the same function
than HT/HOV mode.
H.HT HOV HOV
If the target is a valid user point or a radar joystick point, the function can be activated by engaging the NAV
mode (FNDCPL or NAVDCPL). The FMS then computes directly a transition down entry gate, guides the
aircraft to this TDN point and automatically arms the TDN mode.
Figure 38: Guided transdown AFCS strip.
CAUTION
Be aware that you don’t have control of the pattern computed by the FMS, and then the aircraft will turn by the shortest
direction to the TDN point. The track will be displayed on the NAVD. Therefore, when operating close to the shore or
obstacles, the pilot shall monitor that the computed pattern is clear of obstacles, he shall use all available means
(weather radar, EGPWS, FLIR etc.)
Revision 1 2014-11-14 page 59 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
6.3.2. How to use it:
CR.HT or ALT engaged with a reference height higher than the H.HT.
IAS > 40 kt
Prepare a height to be held - H.HT + the value appear in cyan on the FND.
Set DH at HHT - 20 ft. If the DH is higher than H.HT, once in the hover, lowering H.HT will not be
permitted only raising H.HT.
At least one FND should be on the Hover page to monitor the ground speed.
During the descent and the deceleration, the lateral cyclic beep modifies the track.
Keep in mind that the slope is 4.5° which is around 500 ft per nautical mile.
Reversion to manual control:
When parameters are improperly controlled along the AFCS TDN sequence, pilots shall revert to manual
control: monitoring parameters during the TDN phase is essential to immediately detect out-of-range
parameters. Parameters limits are listed in the table below:
Flight configuration
Criteria IAS < 40KIAS IAS > 40KIAS
Vertical speed less than -300 ft/min -800 ft/min
Maximum pitch attitudes -16° / +14° -12° / +14°
Maximum roll attitudes +/-15° +/-15°
Excessive deviation on an visible /
axis
Ground speed data Total loss Total loss
Reversion to manual control should first attempt a TRANS UP, or, if not possible, execute a manual
recovery:
Disengage the upper modes
Apply 5° nose down attitude
Apply the power as required
Check the established rate of climb
Accelerate to Vy
Revision 1 2014-11-14 page 60 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
6.3.3. It doesn’t work:
If SELECT ANAV message is displayed, select ANAV source on NAVD or FND.
The engagement of any mode disengages the TDN mode.
The HHT reference is no longer displayed after disengagement or disarmament of all radar height based
mode (i.e CR.HT, H.HT and TDN modes).
6.3.4. Summary of TDN mode displays:
Same as for NAV and HT/HOV modes with TDN labels instead of H.HT and HOV.
Revision 1 2014-11-14 page 61 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
6.4. TUP: TRANSITION UP MODE
TUP mode is applicable to the EC225/725 equipped with SAR options, as the mode is initiated only if it is
engaged from H.HT or TDN instead of other modes where the GA mode will be preferred.
The TUP mode characteristic is to acquire the CR.HT reference, but accelerates like GA mode.
NOTE
The fact that the T.UP mode acquires the CR.HT makes the h/c climbing
immediately after engagement and then accelerating. Doing so, the flight path will
be different than in GA.
6.4.1. How it works:
The AFCS controls the pitch (IAS) and the collective axis (CR.HT)
The mode manages the available power from TOP to MCP, depending on the IAS.
The mode is seeking for a rate of climb of 500 ft/min.
The TUP mode is engaged by pressing the GA pushbutton on any collective grip if TDN or H.HT
modes are engaged.
Figure 39: Collective grip – Trans Up / GA engagement & disengagement
And AFCS strip will display:
T.UP T.UP after 15 s or 25 seconds CR.HT IAS
The TUP mode is disengaged specifically by pressing either the “CR.HT” or “IAS” pushbutton on any
FCP or the GA button when TUP is engaged.
To ensure the aircraft will climb, the CR.HT reference must be higher than the HHT reference.
Consequently if the CR.HT reference was lower than the H.HT reference upon
TUP engagement then it is set at either 300 ft or the H.HT reference whichever is the highest.
Revision 1 2014-11-14 page 62 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
6.4.2. How to use it:
Select an IAS with the rotary switch on any FCP. If there is no selection, the system sets Vy.
Select a cruise height with the rotary switch on any FCP. If there is no selection, the system is set to 300 ft
or the H.HT reference, whichever is the highest (Aircraft will not climb)..
Be aware that during the automatic hover, the cyclic beep trim controls the longitudinal and the
lateral motion, the collective beep trim controls the H.HT bug. Once the TUP mode has been
engaged and the relevant labels have been displayed on the AFCS strip, the system reverts to
CR.HT IAS
after 25 seconds, from now on, IAS reference can be changed with the cyclic beep trim and CR.HT
reference with the collective beep trim
6.4.3. It doesn’t work:
The engagement of ALT.A, ALT, VS, HT/HOV or GSPD modes disengages the TUP mode.
6.4.4. Summary of TUP mode displays:
T.UP T.UP labels are displayed on the AFCS strip
Upon pilot’s override against the spring or force trim release on the pitch or collective axes, the
corresponding label color toggles between amber and green
T.UP label color turns amber when AFCS detects a loss of confidence at sensors.
T.UP label flashes in amber inverse video upon loss of radio height signal until mode disengagement.
When AFCS detects that the computed trajectory upon mode engagement is not fulfilled, it sends an
excessive deviation indication to the AFCS strip.
The references are materialized by a green bug on the IAS scale and on the radio height scale. Every
reference change is associated to a white blinking underlining of the corresponding label together with a
white-green blinking of the bug.
Revision 1 2014-11-14 page 63 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
7. AFCS UPPER MODES ENGAGEMENT / DISENGAGEMENT AND
DEVIATIONS MATRIX
Engagement Excessive
Mode Axis
condition
Operating Envelope remarks
deviations
ALT C or P ATT Minimum height 30ft Auto engaged of ALT mode to level-off at 80 ft for 2 sec
150 ft RA detection in IAS, ALT.A or VS
Inhibit on ground Altitudes acquisition at 500
ft/min (1000 ft/min on Cannot exceed computed VNE when ALT
On Collective below 60 EC725) is engaged on Pitch
KIAS or if a speed
command mode is Power limitation at TOP
engaged on pitch axis below 45 KIAS, then MCP
above 65 KIAS
On Pitch above 65 KIAS
VS C or P ATT +2200ft/min to -2200ft/min, - Auto engaged with ALTA. 500 ft/min for 5
above 55KIAS. Limited to sec
Inhibit on ground 300ft/min at 25 KIAS and - Auto engaged after 15 sec on G.A (25
below. sec if GA from hover)
On Collective below 60
KIAS or if a speed Power limitation at TOP - Revert to ALT and level off at 150 ft RA
command mode is below 45 KIAS, then MCP
engaged on pitch axis - Cannot exceed computed VNE when
above 65 KIAS VS is engaged on Pitch
On Pitch above 65 KIAS
ALT.A C or P ATT Above 40 KIAS: - Maintained in armed status with VS 300 ft/min for 5
engaged sec
On Collective below 60 +1000 ft/min for climbing. If
KIAS or if a speed above +1000ft/min at - Revert to ALT and level off at 150 ft RA
command mode is engagement, actual ROC is
engaged on pitch axis applied. - Below 40 KIAS rate of climb is reduced
(power consideration)
On Pitch above 65 KIAS -500 ft/min for descent.
- Below 40 KIAS rate of descent is
reduced (to anticipate risk of Vortex and
settling-with-power)
IAS P ATT From 30 KIAS to computed - Auto engaged after 15sec on G.A (25 12 kt for 2 sec
VNE sec if GA from hover)
Inhibit on ground
- Auto engaged when below 60 KIAS and
ALT, ALTA, VS, GS modes shift to
Collective pitch.
- Auto engaged when loss of one engine
with ALT, ALTA, VS, GS modes
engaged in pitch axis.
- Auto engagement of ALT following 150
ft RA detection with IAS only engaged
Revision 1 2014-11-14 page 64 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
Mode Axis Engagement Operating Envelope remarks Excessive
condition deviations
Standa P and - ATT - Longitudinal speeds: CAUTION: use of standard GSPD and 4 m/s between
CR.HT modes is forbidden for airspeed actual and
rd R - Inhibit on ground - 50 kt FORWARD – 10 kt below 30 KIAS (for EC225 non-SAR) required gspd
REARWARD parameter for 3
GSPD sec
- Lateral speeds:
- 20 kt LEFT and RIGHT
HDG R - ATT - Minimum airspeed 26 KIAS - After engagement, helicopter turn on 10° for 2 sec.
knob rotation side
- Inhibit on ground - Rate of turn: rate 1= 3 °/sec
- Preset engagement: helicopter turns in
- Angle of Bank (in deg.): the shortest direction.
0.16 x airspeed (in KIAS)
- Maximum angle of bank:
22°
A.NAV R - Inhibit on ground - Minimum airspeed 35 KIAS - No excessive deviation displayed N/A
- Rate of turn: rate 1= 3 °/sec - Upon ANAV disengagement returning to
ATT, Angle of Bank is automatically set
- Angle of Bank (in deg.): to cruise bank angle
0.16 x airspeed (in KIAS)
- Maximum angle of bank:
22°
VOR R - ATT - Minimum airspeed 35 KIAS - No excessive deviation computed by N/A
AFCS
- Inhibit on ground - Minimum intercept distance:
6Nm
- Maximum intercept angle:
90°
- Angle of Bank (in deg.):
0.15 x airspeed (in KIAS)
- Maximum angle of bank:
21°
LOC R - ATT - Minimum airspeed 35 KIAS - LOC mode is disengaged when GA is 2.2 dots for 0.6s
engaged. during the first
- Inhibit on ground - Angle of Bank (in deg.): 60s following
0.225 x airspeed (in KIAS) mode's capture
- Maximum angle of bank is and then 1/3 dot
30° during interception. for more than
0.6 s
GS P or C - ATT - Minimum airspeed 35 KIAS - disarmament or disengagement of LOC 2.2 dots for 0.6
mode will cause GS to disarm or s during the first
- Inhibit on ground disengage 30 s following
- LOC mode shall be mode's capture
- at 80 ft above ground, GS disengage, and then 0.7 dot
armed / engaged replaced by ALT to level off at 80 ft. for more than
- selecting GA will automatically 0.6 s
disengage GS
Revision 1 2014-11-14 page 65 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
Mode Axis Engagement Operating remarks Excessive
condition Envelope deviations
GA P and - ATT - 1000 ft/min or higher - Mode engagement available only on 500 ft /min for 5
current value. collective grips (no knob on FCPs) sec.
C - On Ground, VTOSS can
be set (VTOSS is reset - Vy or higher current value - GS cannot be engaged when GA is
to computed value in engaged,
flight after 10 sec. - If no HDG mode engaged,
above Vy) GA will set a zero angle - Previously engaged HDG or ANAV
Of Bank modes will not disengage when GA is
selected,
- If power loss below Vy, GA will set
VTOSS or current speed if between
VTOSS - Vy
CR.HT C - ATT - Minimum height = highest FLY UP: an automatic power application 15 ft (5 m) for at
DH on CRHT mode is triggered when either least 2 s
- Radio Altimeter must be flying 30 ft below CRHT value, or below
available - Maximum height = 2450 ft 200 ft if CRHT is above 230ft;
- Power limitation at TOP
below 45 KIAS, then MCP
above 65 KIAS
SAR P , - Inhibit on ground - Slope 4.5° for transition to FLY UP mode occurs below the lowest H.HT: 10 ft if
hover value between 100ft and HHT minus 20ft height below
option and - Not authorized in IMC reference or 20
R, overland - H.HT default setting HOV mode is compatible with: ALT, ft if above
HT/HO lowest value between ALT.A, VS, and CR.HT. reference
and C - Recommended 100ft and current height
V - CR.HT engaged Reversion to manual control criteria FLY UP: 20 ft
above HHT - H.HT upper limit: 2450ft see table below below the H.HT
- ROC/D +/- 200ft/min H.HT lower limit Pil/copil reference or 100
- IAS > 40KIAS highest DH down to 0ft Flight parameters
ft if the H.HT
lat. Speed 10kt limited to 22ft IMC or night CRITERIA IAS<40 kt IAS>40 kt reference is
- HOV=(pilot + HHO) above 120 ft.
VS less -300 ft/min -800 ft/min
thumbwheels + HHO than
joystick limited to:
-10kt to +50kt Max pitch -16°/+14° -12°/+14°
Longitudinal att.
20kt Lateral
Max roll +/-15° +/-15°
- HHO joystick inputs att.
inhibited when HHT below
10ft Excess On
deviat.
Ground Lost lost
speed
data
SAR P , - Inhibit on ground - Slope 4.5° for transition to FLY UP mode occurs below the lowest
hover limited to 1000 value between 100 ft and H.HT minus 20 ft
option and - Not authorized in IMC ft/min
R, overland Reversion to manual control criteria
TDN same table than above for HT/HOV.
and C - Recommended
- CR.HT engaged During guidance phase, if NAV disengage,
above H.HT the TDN will automatically disconnect.
- ROC/D +/- 200ft/min
- IAS > 40KIAS
lat. Speed 10kt
Revision 1 2014-11-14 page 66 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
Mode Axis Engagement Operating Envelope remarks Excessive
condition deviations
SAR P and - - Same as std GSPD with - HHO joystick can be used to adjust GSPD 4 m/s between
additional feature: actual and
option R Slope 4.5° for transition to hover - During transition to hover (combine use of required GSPD
combined with H.HT GSPD with H.HT) the lateral GSPD parameter for
GSPD modify the track. 3sec
SAR P, - TUP engaged - IAS managed as GA - CR.HT shall be above H.HT. If not, CR.HT
when GA will be set at 300ft or H.HT, whichever is
option and C pushbutton is - CR.HT acquisition using TOP higher.
applied while then MCP based on indicated
TUP H.HT or TDN airspeed.
engaged.
Revision 1 2014-11-14 page 67 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
8. AFCS HIDDEN MODES
PROTECTION MODE DESCRIPTION
ALTITUDE With IAS or V/S engaged on Pitch Channel, when h/c descends to 150’
PROTECTION RADALT – ALT will be installed on the Altimeters strip at 150’ RADALT
equivalent value
BASIC
ALTITUDE Descending fully established on the ILS. If the aircraft remains coupled to
PROTECTION G/S, [ALT] will install at 80ft RADALT equivalent value
ILS
ALTITUDE The minimum altitude that can be selected with [ALT] installed is 30’
PROTECTION RADALT equivalent value
MIN [ALT]
ALTITUDE When IAS is <65 KIAS, [ALT] will install on the collective (4th AXIS)
PROTECTION channel if it is selected in isolation (ie without [IAS] or [GSPD].
LOW AIRSPEED This allows [ALT] to function correctly on the back end of the drag curve
where maintaining altitude using the cyclic pitch channel is not possible.
V/S & POWER The maximum selectable V/S is limited to 300’ at 25 KIAS, increasing to
PROTECTION 2200’ at 55 KIAS.
This prevents excessive descent rates when the h/c is on the back end of
the power required for level flight curve.
AIRSPEED IAS > VNE cannot be selected using the [IAS] selector knob
PROTECTION
AIRSPEED With [ALT] or [V/S] installed, [IAS] will automatically install if the IAS
PROTECTION trends at 60 KIAS in deceleration
<Vy
AIRSPEED If [ALT] or [V/S] modes with [IAS] and the IAS is beeped to a value
PROTECTION beyond what the MCP can provide, deselecting the vertical mode will
cause [IAS] to re-install at the current IAS to prevent an inadvertent
HIGH SPEED MODE descent.
POWER PROTECTION In AEO mode, with the AFCS operating in Basic Mode (ATT - no higher
modes engaged), raising the collective lever using the collective “Rocker”
AEO trim switch is limited to FLI at MCP/MTOP
Revision 1 2014-11-14 page 68 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
PROTECTION MODE DESCRIPTION
NR PROTECTION In OEI mode, with the AFCS operating in Basic Mode (ATT - no higher
modes engaged), the collective will automatically reduce to maintain NR
OEI at 96% and PWR is limited at the FADEC stop (OEI-HI, OEI-LO or OEI-
CT).
Note that with the AFCS operating in Basic Mode (ATT - no higher
modes engaged), the collective will never move up automatically to drop
to 96% NR but will move down automatically to recover the NR back to
96%.
GO-AROUND-OEI If the Go-around button is pressed OEI with IAS <VTOSS, IAS is
installed at VTOSS and once VTOSS is acquired V/S is installed at 1000
IAS<VTOSS
FPM.
The aircraft may descend to acquire VTOSS
GO-AROUND-OEI If the go-around button is pressed OEI when IAS is between VTOSS and
Vy, IAS is installed at the current IAS and V/S is installed at 1000 FPM.
IAS VTOSS > Vy
IAS can be beeped to Vy. The aircraft will not descend
GO-AROUND-OEI If the go-around button is pressed OEI when IAS is between above Vy,
IAS is installed at the current IAS and V/S is installed at 1000 FPM.
IAS >Vy
IAS may reduce but only as far as Vy.
The aircraft will not descend
NR desynchronization In case of low power demand by AFCS upper modes, minimum torque is
limited to (5%+5%) in order to avoid an increase of rotor RPM due to
desynchronization
Revision 1 2014-11-14 page 69 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
9. BEST USE OF AUTOMATION IN EC225 / 725
9.1. GENERALITIES
9.1.1. CRM and automation
In highly automated aircraft such as the EC225 it is important to ensure that the automation (upper modes)
have been set up and engaged correctly. Both crew members should be involved in the procedure, which
has up to 3 functions (anticipate, execute & confirm) and 6 steps:
1. Pre-setting the parameter
2. Crosschecking the setting
3. Engaging or arming the function
4. Checking the correct modes are engaged / armed on the AFCS status zone
5. Calling when the armed mode changes to engaged
6. Monitoring that aircraft response is as anticipated
NOTE
It is permissible for the PM to set up and engage the modes on PF’s instruction
9.1.2. Managing automation
The EC225 is designed to be flown using the autopilot’s upper modes engaged on the 4 axes to enhance
safety and reduce pilot workload. When coupled, AFCS protections improve error management from the
crew.
9.1.3. Automation level
The appropriate level of automation is the one adapted for the task or prevailing condition. If a crew decides
not to use automation, it significantly reduces safety protections.
Engagement or disengagement of AFCS upper modes may occur automatically, without intervention from
the crew. Automatic engagements are part of the AFCS design and will provide pilots with enhanced safety
protection. These advanced functions will reinforce pilot attention in high workload flight phases as long as
system knowledge and mode management is understood. When lack of knowledge or management, doubt
installed and lead to confusion in the cockpit.
In confusing situations, do not shift to an immediate hand flying, consider reverting first to more direct upper
modes (HDG, G/A, etc.).
Except at night or in poor visual references conditions where automation should be used, operators should
define when automations are to be used, taking into account the need to maintain aircrew manual flying
skills.
Revision 1 2014-11-14 page 70 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
9.1.4. Fly through and mixed flying mode
The following remarks are based on techniques to be applied to an h/c with an operating AFCS ATT mode
and one or more AFCS upper mode engaged.
Fly Through is a situation in which AFCS upper modes are engaged but the pilot overrides the autopilot
modes, without disengaging AFCS modes or changing their reference to ensure the desired flight path.
After the pilot overriding action (mode(s) no more flashing in amber), the aircraft is commanded to return to
the attitude reference and the flight path is stabilized. This sequence will occur after a 2 s delay without
further pilot overrides. The upper mode resumes command to bring the aircraft back to the mode’s
reference, with the desired trajectory.
NOTE
Overriding an AFCS mode shall not be considered as “Helping the AFCS mode”.
When such action is performed, it is a “high priority” manoeuvre performed by the
pilot for safety purposes for example traffic/obstacle avoidance.
Mixed Flying mode is a situation in which the aircraft is AFCS coupled in two or three axes and the pilots
flies at least one axes manually.
NOTE
The risk of involuntary interference with the AFCS controlled axes is significant, and
may lead to a mode override with the consequences described above.
Both situations (fly through & mixed flying mode) shall be used only for short term
(limited time).
Hands-On Flying mode is a situation in which the aircraft is flown manually using AFCS ATT stabilization.
Transition from Fly Through, Mixed Flying or Hands-On mode to AFCS upper modes guidance:
Before reverting to upper modes guidance, in order to avoid high residual forces are still felt; it is highly
recommended to first reduce those forces by:
o A short trim release action or
o A stick-plus-beep trim action or
o A beep trim action.
9.1.5. Pre-setting of AFCS coupled modes on ground at departure
There is no added value to preset HDG before takeoff. The only modes to be preset before takeoff are
ALT.A and IAS. After takeoff, before engaging ALT.A, the setting shall be checked to ensure there has been
no change to the pre-selection.
Revision 1 2014-11-14 page 71 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
9.1.6. RADALT (DH/DA) bug settings
For onshore operations, for instrument approach, the decision altitude bug setting (DA) based on (QNH)
shall be set both sides, to the Published/company DA/MDA.
For offshore operations, or more generally when barometric altimeter is set to QFE, DA shall be set to OFF.
The decision height bug setting (DH) shall be set with reference to the Published/company DH/MDH. The
“check height” aural warning should come at the highest or the lowest DH setting, depending on the aircraft
software configuration. Consequently crew shall be aware of the aircraft software configuration.
9.1.7. Use of FMS
FMS lateral navigation should be used to reduce workload during the en route phase and to reduce
workload and risk of CFIT during departure, approach and go-around when applicable procedures are
included in the FMS database.
Any action on the FMS keyboard should be confirmed by cross-checking the corresponding annunciation or
data on the FMS display, FND and/or NAVD.
When in FMS Managed Guidance, if doubt exists regarding the aircraft flight path, the pilot should not try to
reprogram the automated systems. The pilot should revert to aircrew selected guidance together with the
use of navaids raw data, until time and conditions permit a reprogramming of the FMS.
Common error Possible consequence Recommendation
Both pilots occupied with the FMS in Loss of situation awareness One head inside at one time
low workload phase (en route)
Preoccupation with FMS programming Loss of situation awareness and Anticipate FMS programming.
during critical phases, degraded communication Cross check FMS inputs
Late FMS reconfiguration approaching Reaching IAF with the Avoid late reconfiguration, fly
IAF (e.g. following change of runway in inappropriate active FMS the aircraft by reverting to an
use) coupled navigation aircrew selected guidance
together with the use of
navaids raw data
Entering or selecting a wrong waypoint Confusion and CFIT Confirm the navigation by
in the route cross-checking the
corresponding annunciation or
data on the FMS display, FND
and/or NAVD.
Fuel reserve error management Confusion and unprepared Fuel reserve shall be checked
landing and adjusted before flying
Revision 1 2014-11-14 page 72 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
9.1.8. Monitoring of controls
When below 500 feet AGL, the PF should keep hands and feet in a position to immediately take manual
control if circumstances require it. Below 200 feet AGL, the helicopter shall be flown with hands on or close
to cyclic / collective grips without interfering with the AFCS engaged modes.
9.1.9. Use of ALT.A (AFCS vertical modes)
Altitude acquire (ALT.A autopilot mode) can be a useful aid for preventing altitude busts. However, mis-
setting the target altitude will create a high probability of an altitude bust. Crews shall therefore apply the
crosschecking procedure used for altimeter setting whenever an altitude acquire target setting is made or
changed, and whenever altimeter settings are changed whilst an ALT.A setting is armed. Crews must
monitor the climb/descent until the aircraft is stable at the desired altitude and perform calls before reaching
the required altitude to check ALT engagement and subsequent aircraft response.
9.1.10. Use of VS (AFCS vertical modes)
During climb, descent and approach V/S shall not be used without being associated to ALT.A.
9.1.11. Use of GA (AFCS vertical modes)
During the takeoff phase, particularly in a Degraded Visual Environment (DVE), engagement of the vertical
speed and airspeed upper modes shall normally be achieved using the Go-Around button. ALT.A and a
lateral mode shall then be engaged when a positive climb is established, by PF or at any time by PM on
instruction from PF.
In confusing situations, including spatial disorientation or loss of visual references, it is recommended to
engage GA mode to avoid unusual attitude and then fly away. Without a lateral mode engaged selecting GA
will level wings automatically. To recover from an unusual attitude, it may be necessary for the crew to
intervene.
9.1.12. Modes combinations
A good knowledge of every upper mode is essential for best use, engagement, disengagement and
parameters changes. This knowledge is crucial for an optimum and efficient combination of modes.
The following tables are non-exhaustive combinations to be avoided in all operation situation; or
combinations being useful in case of collective mode degradation.
Revision 1 2014-11-14 page 73 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
Collective mode Lateral mode Longitudinal mode Comment
X X ALT or V/S or IAS Not recommended
X ANAV or HDG or X Not recommended
VOR or LOC
ALT or V/S X X Not recommended
X ANAV or HDG ALT or V/S Not recommended except for
maintenance check flight or in
turbulence conditions
X ANAV or HDG IAS Not recommended
X VOR or LOC IAS Not recommended
Figure 40: List of inappropriate level & combination of automation.
Collective mode Lateral mode Longitudinal mode Comment
X LOC G/S ILS approach
X LOC ALT.A ILS LOC only approach (GS out)
X ANAV or HDG or ALT.A or ALT Non Precision Approach
VOR
Figure 41: List of appropriate level & combination of automation in degraded situation.
9.2. TAKEOFF & DEPARTURE
9.2.1. Automation management
At takeoff and departure, whatever upper modes are preset, for modes engagement, the priority should be
given to vertical and longitudinal modes using GA. Then, at the appropriate time, lateral mode should be
engaged.
For engaging lateral and vertical modes after takeoff the recommended procedure is using the collective GA
pushbutton rather than the FCP. It allows avoiding mistakes in mode selection
9.2.2. MFD configuration for departure
When the radios and navaids have been tested, the MFDs should be configured for departure. PM should
normally select NAVD to ROSE with ACAS and/or TAWS selected according to the threat to be managed
and a suitable range to allow 360 º observations of ACAS targets. PF should select NAVD to SECTOR with
a suitable range to give best radar picture after takeoff
9.2.3. Power management
Managing the power through the collective trim gives protection since the trim is inhibited when reaching the
power limit (MTOP at takeoff). It prevents any transient power range incursion but shall only be used if there
is no vertical upper mode engaged.
Revision 1 2014-11-14 page 74 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
9.2.4. Runway takeoff class 1
- Before takeoff, at departure, preset ALT.A, and IAS
- At TDP, in case of continuing takeoff, at V1, PF engages GA and PM ensures GA are engaged on
collective and cyclic pitch,
- Keeps hands near controls (below 200 feet), When established in climb,
o PF or PM (on PF request) confirm ALTA presetting, then presses ALT.A, and PM ensures
ALT.A is armed,
o PF or PM (on PF request) engages lateral mode (HDG or ANAV) and PM ensures it is
engaged,
9.2.5. Low visibility takeoff (LVTO)
- Before takeoff, at departure, preset ALT.A, and IAS
- If power margin permits for taking off, from hover, apply power then cyclic forward, PF presses GA
and PM ensures GA are engaged on collective and pitch,
- Keeps hands near controls (below 200 feet),
- When established in climb,
o PF or PM (on PF request) presses ALT.A, and PM ensures ALT.A is armed,
o PF or PM (on PF request) engages lateral mode (HDG or ANAV) and PM ensures it is engaged,
9.2.6. Ground Helipad takeoff (class 1 & 2)
- Before takeoff, at departure, preset ALT.A,
- At TDP (H1=130 feet), apply power then cyclic forward, PF presses GA and PM ensures GA are
engaged on collective and pitch,
- Keeps hands near controls (below 200 feet), flying collective through to ensure MTOP is attained if
necessary,
- When established in climb,
o PF or PM (on PF request) presses ALT.A, and PM ensures ALT.A is armed,
o PF or PM (on PF request) engages lateral mode (HDG or ANAV) and PM ensures it is engaged,
NOTE
In Degraded Visual Environment (DVE), including at night, from hover 10 feet,
GSPD mode should be engaged to avoid any lateral and/or longitudinal drift.
Revision 1 2014-11-14 page 75 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
9.2.7. Helideck takeoff (class 1 & 2)
- Before takeoff, at departure, check VMS weight, IAS, ALT.A, (FNDs on HOV mode as required) and
check the displayed calculated VTOSS (computed by the aircraft),
- Establish in hover at 5 feet, rotor tips at the edge of the helideck, as required the PF could engages
GSPD (double click) and PM ensures GSPD is engaged on longitudinal and lateral,
- Establish a vertical climb (between 400 and 500 feet per minute),
- At Rotation Point (RP) PF adopts a 15° nose down attitude change,
- After clearing deck edge, PF presses GA and PM ensures GA is engaged on collective and pitch,
- Keeps hands near controls (below 200 feet) to ensure proper nose down attitude and MTOP are
attained as necessary,
- When established in climb,
o Before 40 kt, check power (to avoid transient power incursion),
o PF or PM (on PF request) presses ALT.A, and PM ensures ALT.A is armed,
o PF or PM (on PF request) engages lateral mode (HDG or ANAV) and PM ensures it is engaged,
NOTE
In DVE, the GA mode may be engaged at the RP. After engagement, any further
control override may delay the GA mode trajectory command by 2 seconds.
NOTE
The nose down attitude change can be reduced according to the actual aircraft
weight and wind conditions.
NOTE
VToss for this manoeuvre shall be the exact Vtoss indicated on the ASI with the
correct aircraft weight entered (computed by the aircraft).
Revision 1 2014-11-14 page 76 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
9.2.8. Takeoff from unprepared area (off-airfield)
- At V1, PF engages GA and PM ensures GA is engaged on collective and pitch.
- Keeps hands on controls (below 200 feet), flying collective through to ensure MTOP is attained.
- When established in climb,
o PF or PM (on PF request) presses ALT.A, and PM ensures ALT.A is armed,
o PF or PM (on PF request) engages lateral mode (HDG or ANAV) and PM ensures it is engaged,
NOTE
When the airspeed reading is beyond the blue mark corresponding to the calculated
VTOSS, the flight can proceed without loss of height, even if an engine fails
provided that the correct weight has been entered in the VMS.
9.2.9. Night Vision Goggles takeoff onshore on airfield
- Before takeoff, at departure, preset ALT.A, and IAS, FNDs on HOV mode,
- At hover at 10 feet, the PF engage GSPD (double click) and PM ensure GSPD are captured on
longitudinal and lateral
- Climb vertically through collective beep trim (protection) eventually up to MTOP,
- At Rotation Point (30 feet or 100 feet according to terrain), PF presses GA and PM ensures GA are
engaged on collective and pitch,
- Keeps hands on controls (below 200 feet), flying eventually collective through to ensure MTOP is
attain as necessary,
- When establish in climb,
o Before 40 kt, check power (to avoid transient power incursion)
o PF or PM (on PF request) presses ALT.A, and PM ensures ALT.A is armed,
o PF or PM (on PF request) engages lateral mode (HDG or ANAV) and PM ensures it is engaged,
Revision 1 2014-11-14 page 77 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
9.3. CRUISE
The standard cruise power setting for the EC225 is Maximum Continuous Power (MCP) flying coupled in 4
axes. This allows the system to control power so as to prevent over torqueing (for example in the event of
icing).
In turbulent conditions with more than a very occasional activation of the over torque gong, reduce IAS in
order to avoid any power transient range incursion until the turbulence has subsided.
The maximum range power setting is obtained at approximately MCP minus 0,5 FLI.
Otherwise, in cruise flight, disengage IAS, and apply desired power. (in case of OEI, the system will revert
automatically in four axis mode)
9.4. CLIMB AND DESCENT
For climb and descent, the preferred AFCS mode to manage altitude changes is ALT A.
9.5. APPROACHES
In non-degraded AFCS situation, the best recommended use of AFCS is to fly the aircraft 4-axes coupled.
Except for AFCS degraded situations, mixed flying mode (e.g. flying lateral mode manually) should be
avoided since it can be confusing for the crew. The flight path monitoring must be based on navaids raw
data whatever AFCS modes in use.
MFDs configuration
o FNDs
The basic principle is to display short term objectives (attitude, navigation) on FNDs with HSI mode. For
VOR or LOC approaches, set the inbound course on FNDs. For NDB approaches, select ADF on a pointer.
o NAVDs
The standard practice for PF is to set NAVD to display short/middle term objectives (final & missed
approach). For the PM, the MFD should be set to display middle/long term objectives with general situation
awareness inputs (TAWS or WXR radar and ACAS). This MFDs configuration permits to improve threat
management (in a TEM perspective).
For ILS approaches, both FNDs navigation sources shall be set to ILS (ILS1 on LH, ILS2 on RH) associated
with the relevant final approach course. Both NAVDs should be set on ANAV showing the approach entered
in the FMS if available, if not available, use other suitable waypoints to aid situational awareness. In case of
possible obstacles/terrain threats, TAWS associated with ANAV & ACAS should be displayed on PM MFD
in order to improve situation awareness and threat management.
Revision 1 2014-11-14 page 78 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
9.5.1. ILS approach
MFDs configuration
For ILS approaches, both FNDs navigation sources shall be set to ILS (ILS1 on LH, ILS2 on RH) associated
with the relevant final approach course. Both NAVDs should be set on ANAV showing the approach entered
in the FMS if available, if not available, use other suitable waypoints to aid situational awareness. In case of
possible obstacles/terrain threats, TAWS associated with ANAV & ACAS should be displayed on PM MFD
in order to improve situation awareness and threat management.
Use of AFCS vertical modes
Crews shall use ALT.A whenever descending to a cleared or previously announced altitude or flight level
and both pilots shall cross-check that the correct settings have been made.
Crew shall use ALT.A to manage the descent to MSA then to the altitude required to intercept ILS. If
necessary, once ALT has been captured, the ALT index may be adjusted for changes less than 300’ with
the collective beep, preferably by the PF.
During missed approaches or going around procedures, GA mode shall be engaged (by the PF) and ALT.A
adjusted to the MISSED APCH. altitude and engaged (preferably by the PM) when positive climb is
established and at the command of the PF.
Use of AFCS lateral modes
The arrival, holding pattern, navigation to IAF and missed approach should be flown ANAV coupled to the
FMS database. When radar vectored revert to HDG mode as necessary.
NOTE
When using the FMS to overlay, both pilots must carefully monitor the flight path and
be ready to intervene if necessary.
NOTE
Engaging GA while LOC mode is active will disengage LOC.
Use of AFCS longitudinal modes
The entire approach shall be flown with IAS engaged. For final approach, without any ATC request, the recommended
IAS is 100 knots on a CAT A approach and 90 knots on a CAT H approach.
Use of AFCS after reaching DA for straight in landing
When reaching DA, active modes are GS, LOC and IAS. The aircraft is generally close to the ground and visual
references are confirmed. Nevertheless, since the pertinent parameter is the RVR, a Degraded Visual Environment
(DVE) is possible with associated poor situation awareness. Consequently, it is recommended to maintain modes
engaged, reducing IAS to approximately 40 knots at 100 feet through cyclic beep trim while maintaining visual cues
allowing a transition to manual flight for a safe landing.
In very poor visual environment (heavy rain, night, etc.), fly GS, LOC and IAS until approaching 80 feet. At a vertical
speed dependent altitude above 80 feet the ALT mode engages automatically to reach level flight at 80 feet agl. Fly
ALT, LOC and IAS, ALT mode can be managed to 30 feet agl (minimum ALT setting) using the collective beep trim. It
is also possible to engage GPSD, to manage hover automatic acquisition.
Revision 1 2014-11-14 page 79 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
CAUTION
Automatic level-off requires the radalt to be serviceable (if radalt is not serviceable
vertical modes are displayed in amber).
Use of AFCS during circle to land
When tailwind conditions and traffic permit, a straight in landing should be preferred. Nevertheless, flying a
circle to land shall be managed 4-axes coupled with ALT-HDG-IAS, adjusting ALT, HDG & IAS through
beep trims while maintaining visual cues allowing transition to manual flight for a safe landing.
9.5.2. On shore Non-Precision approach
Use of AFCS vertical modes
Crews shall use ALT.A whenever descending to a cleared or previously announced altitude or flight level
and both pilots shall cross-check that the correct settings have been made.
Crew shall use ALT.A to manage the descent to the MDA. If necessary, in order to manage a continuous
descent (CDFA), V/S should be adjusted using the collective trim.
The ALT.A shall be set to the MDA or rounded to the nearest 50 feet above (e.g. ALT.A set at 650 feet for
MDA at 620 feet). If necessary, once ALT has been captured, the ALT index may be adjusted with the
collective beep, preferably by the PF.
During missed approaches or going around procedures, GA mode shall be engaged (by the PF) and ALT.A
adjusted to the MISSED APCH. altitude and engaged (preferably by the PM) when positive climb is
established and at the command of the PF.
Use of AFCS lateral modes
The arrival, holding pattern, approaches and missed approach shall be flown ANAV coupled to the FMS
database. When radar vectored revert to HDG mode as necessary.
NOTE
From AFCS V9.61 software version, engaging GA while ANAV mode is engaged will
not disengage ANAV.
Use of AFCS longitudinal modes
The entire approach shall be flown with IAS engaged. For final approach, without any ATC request, the
recommended IAS is 100 knots on a CAT A approach and 90 knots on a CAT H approach.
Use of AFCS after reaching MDA for straight in landing
At this stage, active modes are ALT, ANAV and IAS. The aircraft is generally close to the ground and visual
references are confirmed. Nevertheless, since the pertinent parameter is the RVR, a Degraded Visual
Environment (DVE) is possible with associated poor situation awareness. Consequently, it is recommended
to maintain modes engaged, reducing IAS to approximately 40 knots at 100 feet through cyclic beep trim
while maintaining visual cues allowing a transition to manual flight for a safe landing.
Revision 1 2014-11-14 page 80 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
Use of AFCS during circle to land
When tailwind conditions and traffic permit a straight in landing should be preferred. Nevertheless, flying a
circle to land shall be managed 4 axes coupled with ALT-HDG-IAS, adjusting ALT, HDG & IAS through
beep trims while maintaining visual cues allowing transition to manual flight for a safe landing.
9.5.3. Airborne radar approach (ARA)
MFDs configuration
For offshore approaches (ARA) the configuration should be NAVD set to ANAV as navigation source, FND
with a course bar selected to the desired FAT and a needle visible showing the destination’s NDB beacon if
available. Radar should be displayed on PM’s NAVDs (no “check range” issue from MFDs software version
5.11.). Ensure that all MFDs’ are at the same range settings (20nm or less) to avoid radar single direction
sweep. Normally Search 1 is the best radar mode; however other modes may be used if that gives a better
radar return in the particular conditions. The NAVD shall be set to display both the FMS and radar positions
of the installation. Should a significant discrepancy between the two positions be noted, the approach must
be discontinued to allow the reason for the discrepancy to be identified. Bear in mind that floating
installations such as FSUs / tankers at anchor may have a significant circular locus of positions according to
wind or tide. Range information used during final approach must be taken from the leading edge of the radar
position, not from the GPS position.
For using ALT.A, a local QNH must be obtained from the destination installation or one nearby, and
compared with RADALT indications. The setting on the FND barometric altimeters must be adjusted to align
with RADALT indications, however if the required adjustment is more than 2 Hpa different from reported
QNH, the approach should be discontinued until the reason for the discrepancy is determined, for example
by obtaining a local QNH from another source.
Use of AFCS longitudinal modes
The entire flight shall be flown with IAS engaged and preferably managed by the PF through cyclic beep
trim. Within 2nm the minimum IAS should be 60kts and maximum Ground Speed should be 70kts.
Use of AFCS lateral modes
It is permissible to couple the aircraft to the FMS until the Offset Initiation Point (OIP) is reached (1.5 nm)
but the flight path must be monitored using weather radar and NDB (where appropriate). The ANAV (FMS)
mode must be reverted to HDG if the flight path deviates from the desired FAT
Use of AFCS vertical modes
Crews shall use ALT.A whenever descending to a cleared or previously announced altitude or MDH and
both pilots shall cross-check that the correct settings have been made. If necessary, in order to manage a
continuous descent, V/S should be adjusted using the collective trim. (Vertical speed is not adjustable with
CR.HT mode engaged)
The ALT.A shall be set to the MDH or rounded to the nearest 50 feet above (e.g. ALT.A set at 650 feet for
MDA at 620 feet). If necessary, once ALT has been captured, the ALT index may be adjusted with the
collective beep, preferably by the PF.
Revision 1 2014-11-14 page 81 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
Use of AFCS after reaching Offset Initiation Point (OIP) to MAP
Before reaching OIP, active modes are ALT, ANAV or HDG and IAS. At the latest, by OIP PM shall engage
HDG. It is recommended to maintain modes engaged while maintaining visual cues allowing a transition to
manual flight for a safe landing.
On FMS, creating a discontinuity on the leg or an alternate route could help in case off missed approach.
Use of AFCS for landing
Maneuvering from the MAP to the helideck shall be managed using 4 axes upper modes with ALT-HDG-IAS
engaged. Adjust ALT, HDG & IAS through beep trims while maintaining visual cues allowing transition to
manual flight for a safe landing.
Use of AFCS for Missed Approach
During missed approaches or going around procedures, GA mode shall be engaged (by the PF). When
positive climb is established and at the command of the PF, following modes should be engaged (preferably
by the PM):
- ALT.A adjusted to the MISSED APCH. altitude and engaged
- HDG or ANAV mode should be engaged,
9.5.4. ACAS
The TCAS is an on board collision avoidance and traffic situation display system with computer processing
to identify and display potential and predicted collision targets, and issue vertical resolution advisories to
avoid conflict.
From the transponder replies, TCAS determines relative altitude, range, and bearing of any aircraft
equipped with a mode C or S transponder. From this, TCAS determines the threat using standardized
algorithms. It assesses the situation every second.
Outputs from the TCAS system are voice messages and visual displays for resolution advisories (TCAS
RAs) and traffic advisories (TCAS TAs). In cases where the own and the intruder aircraft are equipped with
an operating TCAS, the resolution advisory will be co-ordinated so as to complement each other in order to
further reduce the potential for a collision. Refer to FLM (supplementary part) for:
- Deeper system description,
- System limitations regarding ground proximity.
TCAS TA
The TA is informative and indicates potential threats. It gives the approximate position relative to the
conflicting traffic:
- Azimuth at least,
- FL difference and vertical tendency (climbing/descending) only if fitted with mode C or S.
Actions to avoid collision:
1) The PF shall manoeuvre so as to maintain, create or increase vertical spacing and advise the
PM. Without vertical data on the threats, PF has to decide according to flight path and ground
proximity,
2) Once the ACAS/TCAS indicates that adequate separation has been achieved the aircraft
should be promptly returned to its intended flight path, and ATC informed (PM if applicable).
Revision 1 2014-11-14 page 82 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
TCAS RA
The RA displays same information as TA but also provides a threat resolution in the form of a vertical
manoeuvre if the potential conflict is projected to occur and with aircraft squawking on mode C or S.
Actions to avoid collision:
1) The PF shall mandatory and immediately follow RA - in the given way and with the
appropriate vertical speed – and independently from ATC instructions (or let the AFCS
manoeuvres accordingly) and advise the PM:
- If an instruction to manoeuvre is received simultaneously from a RA and from ATC, and
the instructions conflict, the advice given by the RA shall be followed,
- Whenever a RA requires "CLIMB" while the airplane is in landing configuration, a go-
around shall be initiated;
2) Once the ACAS/TCAS indicates that adequate separation has been achieved the aircraft
should be promptly returned to its intended flight path, and ATC informed (PM if applicable),
3) Any RA shall be reported after flight to the SMS manager.
Important remarks:
It is emphasized that ACAS/TCAS relies upon information received from transponder equipped aircraft by
aircraft similarly fitted. RAs will only be generated if both the receiving aircraft and the potential intruder are
squawking in altitude Mode C and S. Consequently:
- TCAS will not detect threats without transponder,
- If the threat is not squawking on mode C or S, TCAS cannot compute vertical spacing (TA and RA).
Mode A transponders does not provide altitude information,
- All mode C and S transponders have the same altitude setting: 1013hPa. Then all altitude data are
directly usable (FL difference).
The equipment is not capable of resolving with complete accuracy based only on the bearing or heading
information,
Pilots shall be aware of the limitations of the particular equipment, as the full range of TAs and RAs may not
be produced beyond the minimum and maximum altitudes specified for its operation. E.g. on EC225:
When Hp is higher than FL100 climbing RAs are inhibited,
Below 1 500ft AGL TAs and RAs laws depend on flight profile (RAs may be inhibited, refer to FLM).
The PM shall observe the manoeuvre, and call out any abnormalities (and inform ATC as soon as
appropriate).
Flight crews and crew members may try to acquire visual contact to secure trajectory.
CAUTION
A visual identified traffic is not necessarily the intruder. The PF shall be sure that
airspace where the aircraft is going to is free.
TCAS is not an “air-to-air” radar. In VMC (VFR or IFR) “See and avoid” method remains the safest to
avoid collision. Pilots should NOT only look outside when the system generates a TA and where the
track is plotted. Pilots remain in charge and responsible for separation and anti-collision.
Revision 1 2014-11-14 page 83 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
N° 2 - 34
9.5.5. TAWS - Ground proximity warning system (GPWS)
The GPWS shall be energized and used throughout flight, unless it has become unserviceable and the MEL
permits it to remain so for a specified period.
GPWS is intended to provide cautions and warnings of unintentional closure with the ground which requires
immediate remedial action by the flight crew.
In addition to the basic or advanced GPWS equipment, the EGPWS (TAWS) functions give forward looking
warnings to the flight crew.
Outputs from the CPWS system are voice messages such as “Pull up”, “Terrain, Terrain”, “Warning
Obstacle”, “Two Hundred”, “Bank Angle” etc.
Refer to RFM Sup.31 for details.
Irrespective of their nature, all cautions and warnings shall be reported to the SMS manager so that the
circumstances may be investigated and the reliability of the equipment established. Pilots must be aware of
becoming slow to react to GPWS cautions/warnings on the basis of previous suspect performance.
Actions to avoid collision:
- Below MSA: if not in sight of the surface, PF shall perform an immediate pull up manoeuvre using Vy
and maximum continuous power, and advise the PM,
- At or above MSA: the PF shall immediately assess aircraft position, altitude and vertical speed and
advise the PM. If proximity to MSA is in doubt take action as described for below MSA,
- ATC shall be advised of the manoeuvre and intentions as soon as possible.
Important remarks:
- PM shall observe the manoeuvre (i.e. radar altimeter, vertical speed) and call out any abnormalities
(and inform ATC as soon as appropriate),
- Investigation of the reason for a caution/warning shall take second place to the response action,
- No attempt shall be made to recover the original flight path until the cause of the caution has been
positively established and eliminated.
Revision 1 2014-11-14 page 84 / 84
Ce document est disponible sur internet : www.eurocopter.com/techpub
Potrebbero piacerti anche
- Helicopter Maneuvers Manual: A step-by-step illustrated guide to performing all helicopter flight operationsDa EverandHelicopter Maneuvers Manual: A step-by-step illustrated guide to performing all helicopter flight operationsValutazione: 5 su 5 stelle5/5 (1)
- 407 Garmin G1000H PG PDFDocumento548 pagine407 Garmin G1000H PG PDFLavern P. SipinNessuna valutazione finora
- AFCSDocumento34 pagineAFCSMuralidharan ShanmugamNessuna valutazione finora
- Aerospace Actuators 2: Signal-by-Wire and Power-by-WireDa EverandAerospace Actuators 2: Signal-by-Wire and Power-by-WireNessuna valutazione finora
- Technical Description H130 2021Documento88 pagineTechnical Description H130 2021Hubert Lindenthaler100% (1)
- Enhanced Avionics System A Complete Guide - 2020 EditionDa EverandEnhanced Avionics System A Complete Guide - 2020 EditionNessuna valutazione finora
- EC135 LimitationsDocumento1 paginaEC135 LimitationsHighspeed Flyboy100% (1)
- Aw 109Documento31 pagineAw 109Alex AbadNessuna valutazione finora
- EC-155B1 Complimentary Flight Manual - Section 7 Description and SystemsDocumento118 pagineEC-155B1 Complimentary Flight Manual - Section 7 Description and SystemsFlightdispatch Airjuan100% (1)
- Eurocopter Poh PDFDocumento2 pagineEurocopter Poh PDFBrian0% (4)
- R44 II Flight ManualDocumento238 pagineR44 II Flight ManualblackhawkNessuna valutazione finora
- AW109SP - CockpitDocumento1 paginaAW109SP - Cockpitadwad100% (1)
- Parte 1 FLM Ec 120Documento219 pagineParte 1 FLM Ec 120João Corrêa100% (1)
- EC135 Autopilot July 2004Documento105 pagineEC135 Autopilot July 2004Евгений Касьянов100% (3)
- A109 Heli Pilot GuideDocumento54 pagineA109 Heli Pilot GuideDenise Porter100% (2)
- EC135 Classic B1 R06EN 02 - Lifting System.22911.2020 11 03.printableDocumento72 pagineEC135 Classic B1 R06EN 02 - Lifting System.22911.2020 11 03.printableTitou GoltzNessuna valutazione finora
- H130 - G500 Type Rating: EC130 (Turbomeca Arriel 2) : For Instruction OnlyDocumento2.091 pagineH130 - G500 Type Rating: EC130 (Turbomeca Arriel 2) : For Instruction OnlyrogerioNessuna valutazione finora
- Section 14 - Autopilot PDFDocumento23 pagineSection 14 - Autopilot PDFrobbertmdNessuna valutazione finora
- G1000 System Maintenance Manual Hawker Beechcraft G58Documento80 pagineG1000 System Maintenance Manual Hawker Beechcraft G58Cristian PugaNessuna valutazione finora
- Airbus H125 Airconditioning System - Caton Michael, Amta 329 3BDocumento8 pagineAirbus H125 Airconditioning System - Caton Michael, Amta 329 3BBENoNessuna valutazione finora
- Automatic Flight Control SystemDocumento50 pagineAutomatic Flight Control SystemZay Yar100% (1)
- 155b1 FLM EasaDocumento1.548 pagine155b1 FLM EasarobinyNessuna valutazione finora
- EC-135 T1 (CDS) Normal ProceduresDocumento16 pagineEC-135 T1 (CDS) Normal ProceduresHighspeed Flyboy100% (1)
- H145 Normal Checklist 1.3Documento1 paginaH145 Normal Checklist 1.3Pili Simon100% (1)
- Flight Manual EC135for XPlane9R2Documento49 pagineFlight Manual EC135for XPlane9R2AlexNessuna valutazione finora
- Pilot Guide Kfc200Documento44 paginePilot Guide Kfc200Javier100% (2)
- Dauphin II Flight Manual PDFDocumento32 pagineDauphin II Flight Manual PDFvanmorrison69100% (1)
- Da Fcs Pilots Manual spz7000Documento55 pagineDa Fcs Pilots Manual spz7000Shawn McCarville100% (1)
- Eurocopter AS332-EC225Documento15 pagineEurocopter AS332-EC225Axel50% (2)
- EC135 Classic B1 R06EN 10 - Electrical System.22911.2020 11 03.printableDocumento76 pagineEC135 Classic B1 R06EN 10 - Electrical System.22911.2020 11 03.printableTitou GoltzNessuna valutazione finora
- Section 17: Audio Voice Alerting Device - AVADDocumento4 pagineSection 17: Audio Voice Alerting Device - AVADrobbertmdNessuna valutazione finora
- Cirrus SR22 Systems DescriptionsDocumento13 pagineCirrus SR22 Systems DescriptionsGourav DasNessuna valutazione finora
- Course Catalogue PDFDocumento180 pagineCourse Catalogue PDFROQUE MENDOZANessuna valutazione finora
- 1AW139 CMP Initial Pages 31.10.2012Documento5 pagine1AW139 CMP Initial Pages 31.10.2012Fayssal BkzNessuna valutazione finora
- EC 135 / BK117 C - 2 Training Manual Cat. ADocumento48 pagineEC 135 / BK117 C - 2 Training Manual Cat. AChirca FlorentinNessuna valutazione finora
- As350 B2 13-100Documento3 pagineAs350 B2 13-100JizzPontesNessuna valutazione finora
- Helicopters: Technical Data 2019Documento4 pagineHelicopters: Technical Data 2019Huda Lestra100% (1)
- TM Ab139-Aftt (2005-02) PDFDocumento1.384 pagineTM Ab139-Aftt (2005-02) PDFAgbanaFemi100% (3)
- AFCSDocumento23 pagineAFCSFaizin Khaniff100% (1)
- Section 13 - B: Engine Controls & IndicationsDocumento6 pagineSection 13 - B: Engine Controls & IndicationsrobbertmdNessuna valutazione finora
- EC135 Classic B1 R06EN 03 - Fuselage.22911.2020 11 03.printableDocumento34 pagineEC135 Classic B1 R06EN 03 - Fuselage.22911.2020 11 03.printableTitou GoltzNessuna valutazione finora
- 110CDocumento231 pagine110CJuan Daquino100% (1)
- Atr Lm3 AhrsDocumento31 pagineAtr Lm3 AhrsKezia SorminNessuna valutazione finora
- A109e Normal Checklist Rev 2Documento2 pagineA109e Normal Checklist Rev 2MD Air Ops LLCNessuna valutazione finora
- MFD & PFD Warning - Caution Sheet Aw139Documento9 pagineMFD & PFD Warning - Caution Sheet Aw139SOHAIL HASSANNessuna valutazione finora
- GNS-XLS Operator's Manual Rev8 PDFDocumento415 pagineGNS-XLS Operator's Manual Rev8 PDFSergey D100% (1)
- EC-135 T-1 Emergency ProceduresDocumento48 pagineEC-135 T-1 Emergency ProceduresHighspeed FlyboyNessuna valutazione finora
- EC130 B4 Technical DataDocumento30 pagineEC130 B4 Technical DataBruno Alonso PachecoNessuna valutazione finora
- Ec225 Sar 04 09Documento20 pagineEc225 Sar 04 09Alexander FalconerNessuna valutazione finora
- Orion: Tech Data OverviewDocumento27 pagineOrion: Tech Data OverviewMaarten Van Den HeuvelNessuna valutazione finora
- Ec 135Documento100 pagineEc 135choppingcloudsNessuna valutazione finora
- Bombardier Challenger 01 ElectricalDocumento24 pagineBombardier Challenger 01 ElectricalEmanøel AlvesNessuna valutazione finora
- UH-60 Related DocumentDocumento136 pagineUH-60 Related DocumentRobert WangNessuna valutazione finora
- AS350B3 Transition Pilot POIDocumento8 pagineAS350B3 Transition Pilot POIdiablohunoNessuna valutazione finora
- Body AW189 OffshoreDocumento5 pagineBody AW189 OffshorePeter Ijaramendi100% (3)
- Ec130b4-Tech Data 2009Documento58 pagineEc130b4-Tech Data 2009Fran Garita100% (1)
- EC 130 B4-02 Intro To FM and LimitsDocumento39 pagineEC 130 B4-02 Intro To FM and LimitsMZJ100% (1)
- Ec225lp Initial Atp-Type Rating Syllabus v210Documento52 pagineEc225lp Initial Atp-Type Rating Syllabus v210Yosif ThiabNessuna valutazione finora
- Component Symbols: Pressure TransmitterDocumento21 pagineComponent Symbols: Pressure TransmitterItgeltbayarNessuna valutazione finora
- Contribution of Medieval MuslimDocumento16 pagineContribution of Medieval Muslimannur osmanNessuna valutazione finora
- Why We Need A Flying Amphibious Car 1. CarsDocumento20 pagineWhy We Need A Flying Amphibious Car 1. CarsAsim AhmedNessuna valutazione finora
- Concrete Casting - Pump Station ADocumento13 pagineConcrete Casting - Pump Station ABright MuzaNessuna valutazione finora
- Powerplant QuestionsDocumento19 paginePowerplant QuestionsAshok KumarNessuna valutazione finora
- Unit 13 Dialogue Writing: ObjectivesDocumento8 pagineUnit 13 Dialogue Writing: ObjectivesAkg GuptNessuna valutazione finora
- Ship Recognition Manual TOSDocumento138 pagineShip Recognition Manual TOSCody Lees94% (17)
- Progressive Muscle Relaxation ExerciseDocumento2 pagineProgressive Muscle Relaxation Exerciseraghu2362704100% (1)
- Practicewith Argument Athletesas ActivistsDocumento30 paginePracticewith Argument Athletesas ActivistsRob BrantNessuna valutazione finora
- I. Objectives Ii. Content Iii. Learning ResourcesDocumento13 pagineI. Objectives Ii. Content Iii. Learning ResourcesZenia CapalacNessuna valutazione finora
- LQZLQM ) So"L/L6H Klans LN : Sfof (No K - Of) HGSF) Nflu DFQDocumento5 pagineLQZLQM ) So"L/L6H Klans LN : Sfof (No K - Of) HGSF) Nflu DFQSAJAL KOIRALANessuna valutazione finora
- Configuring Hyper-V: This Lab Contains The Following Exercises and ActivitiesDocumento9 pagineConfiguring Hyper-V: This Lab Contains The Following Exercises and ActivitiesMD4733566Nessuna valutazione finora
- Noth PicturesDocumento17 pagineNoth PicturesJana AssaNessuna valutazione finora
- Topic 3 Intellectual RevolutionDocumento20 pagineTopic 3 Intellectual RevolutionOlive April TampipiNessuna valutazione finora
- Philips HD 9 User ManualDocumento3 paginePhilips HD 9 User ManualNdangoh DerekNessuna valutazione finora
- Classical Theories of Economic GrowthDocumento16 pagineClassical Theories of Economic GrowthLearner8494% (32)
- Manish Kumar: Desire To Work and Grow in The Field of MechanicalDocumento4 pagineManish Kumar: Desire To Work and Grow in The Field of MechanicalMANISHNessuna valutazione finora
- Basic Approach To The Audit of Electronically Processed DataDocumento2 pagineBasic Approach To The Audit of Electronically Processed DataJestell Ann ArzagaNessuna valutazione finora
- International Supply Chain ManagementDocumento2 pagineInternational Supply Chain ManagementPRASANT KUMAR SAMALNessuna valutazione finora
- Ateneo de Naga University: Professional Training For Teacher 4.0Documento10 pagineAteneo de Naga University: Professional Training For Teacher 4.0Rosemarie BrionesNessuna valutazione finora
- Combinational Logic-Part-2 PDFDocumento25 pagineCombinational Logic-Part-2 PDFSAKSHI PALIWALNessuna valutazione finora
- WSI - Catalogue of O-Ring PDFDocumento37 pagineWSI - Catalogue of O-Ring PDFyearetg100% (1)
- Emerson Mentor MP ManualDocumento182 pagineEmerson Mentor MP ManualiampedrooNessuna valutazione finora
- CUIT 201 Assignment3 March2023Documento2 pagineCUIT 201 Assignment3 March2023crybert zinyamaNessuna valutazione finora
- EEE301 Digital Electronics Lecture 1 Part 3: Dr. A.S.M. MohsinDocumento6 pagineEEE301 Digital Electronics Lecture 1 Part 3: Dr. A.S.M. MohsinAaa AaaNessuna valutazione finora
- Dissertation MA History PeterRyanDocumento52 pagineDissertation MA History PeterRyaneNessuna valutazione finora
- Nissan Note E-Power 2022 Quick Guide ENDocumento57 pagineNissan Note E-Power 2022 Quick Guide ENSarita EmmanuelNessuna valutazione finora
- Design of Footing R1Documento8 pagineDesign of Footing R1URVESHKUMAR PATELNessuna valutazione finora
- JVC tm1010pnDocumento4 pagineJVC tm1010pnPer VigiloNessuna valutazione finora
- Zener Tester: by MedhatkoDocumento6 pagineZener Tester: by Medhatkosaran gulNessuna valutazione finora
- Mba633 Road To Hell Case AnalysisDocumento3 pagineMba633 Road To Hell Case AnalysisAditi VarshneyNessuna valutazione finora