Potrebbero piacerti anche
- Problemas resueltos de Hidráulica de CanalesDa EverandProblemas resueltos de Hidráulica de CanalesValutazione: 4.5 su 5 stelle4.5/5 (7)
- Ejercicios Capitulo 4 CorripioDocumento35 pagineEjercicios Capitulo 4 CorripioMark Antony100% (2)
- Problemas de Control de ProcesosDocumento18 pagineProblemas de Control de ProcesosAmely Mamani HuancaNessuna valutazione finora
- Ejercicios de Control de ProcesosDocumento68 pagineEjercicios de Control de ProcesosFredy Dario Cruz Fernandez75% (4)
- Calculo de Porosidad en Torres Prac 20Documento5 pagineCalculo de Porosidad en Torres Prac 20Aaron GodoyNessuna valutazione finora
- Balance de Energía para Un CSTRDocumento3 pagineBalance de Energía para Un CSTRmoebius314100% (1)
- Practica 4 Factor de Friccion y Caida de Presion en Valvulas y AccesoriosDocumento13 paginePractica 4 Factor de Friccion y Caida de Presion en Valvulas y AccesoriosJoaqin Valdez0% (1)
- McwilliamsDocumento1 paginaMcwilliamsMaribel Ibarra CNessuna valutazione finora
- Relación entre caída de presión y peso de catalizador en reactores de lecho fijoDocumento19 pagineRelación entre caída de presión y peso de catalizador en reactores de lecho fijoEdwin Pachacuti ApazaNessuna valutazione finora
- SIMULACCION Del Amoniaco en Aspen PlusDocumento9 pagineSIMULACCION Del Amoniaco en Aspen PlusDylan Gonzales Muñoz100% (2)
- Matemáticas Aplicadas en Ingeniería Química - Palacio, L.A.Documento299 pagineMatemáticas Aplicadas en Ingeniería Química - Palacio, L.A.vargasxp100% (3)
- Proceso Cavett separación hidrocarburosDocumento2 pagineProceso Cavett separación hidrocarburosTania MirandaNessuna valutazione finora
- Examen de ReactoresDocumento9 pagineExamen de ReactoresDavidNessuna valutazione finora
- Selección de Variables de Diseño de 3 Procesos Químicos y Estimación de Grados de LibertadDocumento10 pagineSelección de Variables de Diseño de 3 Procesos Químicos y Estimación de Grados de LibertadCarlos Avelino100% (1)
- Ejercicio 01 Unidad 04Documento1 paginaEjercicio 01 Unidad 04Diana SujeyNessuna valutazione finora
- Trabajo Practico Diseño Reactores IsotérmicosDocumento4 pagineTrabajo Practico Diseño Reactores Isotérmicosrodrigo0% (1)
- Reactoresquímicosuno FDocumento11 pagineReactoresquímicosuno FJessy SarabiaNessuna valutazione finora
- Dwsim IiDocumento109 pagineDwsim Iicristian gaete essedinNessuna valutazione finora
- Informe Destilacion ContinuaDocumento12 pagineInforme Destilacion ContinuaRoxana Andreina RoblesNessuna valutazione finora
- Diseño reactor PBRDocumento11 pagineDiseño reactor PBRLeidy CastroNessuna valutazione finora
- Simulación de Un PFR AdiabáticoDocumento8 pagineSimulación de Un PFR AdiabáticoLucio David Ramírez GarcíaNessuna valutazione finora
- Caida de PresionDocumento15 pagineCaida de Presionana l mNessuna valutazione finora
- Problemas de Termodinámica 2Documento6 pagineProblemas de Termodinámica 2OscarTorresNessuna valutazione finora
- Ejercicio Balance EtilbencenoDocumento15 pagineEjercicio Balance Etilbencenoluzda201483% (6)
- Problemario Bloque 3 Diseño de Equipo de SeparacionDocumento7 pagineProblemario Bloque 3 Diseño de Equipo de Separacionchuchoras0% (1)
- Optimizacion de ReactoresDocumento18 pagineOptimizacion de ReactoresNorma LidiaNessuna valutazione finora
- Act 2 Problem, A Capitulo 11Documento12 pagineAct 2 Problem, A Capitulo 11mitziNessuna valutazione finora
- Capitulo 9, Sintesis de Redes de Intercambio de CalorDocumento15 pagineCapitulo 9, Sintesis de Redes de Intercambio de CalorGloria MoralesNessuna valutazione finora
- Exposicion R1Documento16 pagineExposicion R1ElenaNessuna valutazione finora
- 6.23 Ocon-TojoDocumento6 pagine6.23 Ocon-TojoKevin PradoNessuna valutazione finora
- Modelos Matematicos para Reactores QuimicosDocumento15 pagineModelos Matematicos para Reactores Quimicosmaryp_236100% (1)
- 2-2019 Problemas de Rtac PDFDocumento9 pagine2-2019 Problemas de Rtac PDFAldo Jhared Ulloa ClaureNessuna valutazione finora
- Resumen Cap 1 2 3 FoglerDocumento5 pagineResumen Cap 1 2 3 FoglerJuan Manuel Pozo VillarroelNessuna valutazione finora
- Intercambiadores de calor ITLagunaDocumento5 pagineIntercambiadores de calor ITLagunaDavid HerreraNessuna valutazione finora
- (Chemical Engineering Ch-60-107Documento48 pagine(Chemical Engineering Ch-60-107Geovanny J.Nessuna valutazione finora
- Cuestionario de AgitaciónDocumento4 pagineCuestionario de AgitaciónVanessa Hernandez100% (1)
- Filtracion - Centrifuga EjercicioDocumento6 pagineFiltracion - Centrifuga EjercicioLuisE.TrianaTorres100% (1)
- Practica 2, AbsorcionDocumento12 paginePractica 2, AbsorcionfatimaNessuna valutazione finora
- Adsorbedores de Lecho FijoDocumento6 pagineAdsorbedores de Lecho FijoDaniel JiménezNessuna valutazione finora
- Tarea - de Linealización Tarea 1Documento2 pagineTarea - de Linealización Tarea 1Jerson Llanqui NuñesNessuna valutazione finora
- Ingeniería Química: Elementos de ingeniería de las reacciones químicasDocumento14 pagineIngeniería Química: Elementos de ingeniería de las reacciones químicasSofia GirónNessuna valutazione finora
- Determinación constante velocidad hidrólisis acetato metiloDocumento14 pagineDeterminación constante velocidad hidrólisis acetato metiloMiguel Angel JassoNessuna valutazione finora
- Libro Diseo y Simulacin2Documento480 pagineLibro Diseo y Simulacin2Diego Corona100% (1)
- Aplicaciones de La Ecuación de Estado de Peng-Robinson Mediante MatlabDocumento16 pagineAplicaciones de La Ecuación de Estado de Peng-Robinson Mediante MatlabFernando AcNessuna valutazione finora
- Problemas Capitulos 2 3 9 Falta 10 y 11Documento65 pagineProblemas Capitulos 2 3 9 Falta 10 y 11Víctor Javier Cruz Martinez100% (1)
- 3a. Efecto de Difusion Externa Sobre Reacciones Heterogeneas FinalDocumento66 pagine3a. Efecto de Difusion Externa Sobre Reacciones Heterogeneas FinalRicardo JaimesNessuna valutazione finora
- 4 Reactores No IsotermicosDocumento48 pagine4 Reactores No IsotermicoskevinNessuna valutazione finora
- Producción de Ciclohexanona-Seminario1Comentado PDFDocumento50 pagineProducción de Ciclohexanona-Seminario1Comentado PDFRuben LealNessuna valutazione finora
- Coco SimulatorDocumento3 pagineCoco SimulatorPaitoGoyesNessuna valutazione finora
- Problemas de Control de ProcesosDocumento58 pagineProblemas de Control de ProcesosAmely Mamani HuancaNessuna valutazione finora
- Ejercicios de Smith Corripio Control Eprocesos QuimicosDocumento58 pagineEjercicios de Smith Corripio Control Eprocesos QuimicosJhofma RyoChizen71% (7)
- Ejercicios de Control de ProcesosDocumento68 pagineEjercicios de Control de ProcesosPaulina CarmeloNessuna valutazione finora
- Modelo de mezclado de primer orden enDocumento15 pagineModelo de mezclado de primer orden enDiana RevillaNessuna valutazione finora
- Trabajo de Control 1Documento68 pagineTrabajo de Control 1Fredy Dario Cruz FernandezNessuna valutazione finora
- Guia LabDocumento18 pagineGuia LabAlvaro GustavoNessuna valutazione finora
- p9ContUnivRevDocumento4 paginep9ContUnivRevfredwar.bensonNessuna valutazione finora
- Mecánica de Fluidos: Hidrodinámica y Principios de ConservaciónDocumento51 pagineMecánica de Fluidos: Hidrodinámica y Principios de Conservaciónkevin joshua segura chicoNessuna valutazione finora
- Cte R T: Resolución 25Documento7 pagineCte R T: Resolución 25HENRYAVIADOR1825Nessuna valutazione finora
- Ciclos iterativos en Python: Controla la repetición de códigoDocumento22 pagineCiclos iterativos en Python: Controla la repetición de códigoEmerson gutierrezNessuna valutazione finora
- Medicion Estatica Basica Rev 2Documento63 pagineMedicion Estatica Basica Rev 2Mateo SaloNessuna valutazione finora
- Funciones en Python: Composición, tipos y usoDocumento54 pagineFunciones en Python: Composición, tipos y usoOrlandoNessuna valutazione finora
- Estructuras de ControlDocumento17 pagineEstructuras de ControlMateo SaloNessuna valutazione finora
- R - 2 Introducción Cap 1,2,3 2018-2Documento25 pagineR - 2 Introducción Cap 1,2,3 2018-2Mateo Salo100% (1)
- Formato 054 SeminarioDocumento7 pagineFormato 054 SeminarioMateo SaloNessuna valutazione finora
- Flujo Sobre Una Compuerta GP 3 Informe 4Documento24 pagineFlujo Sobre Una Compuerta GP 3 Informe 4Juan NavarroNessuna valutazione finora
- DemenciaDocumento40 pagineDemenciaMateo SaloNessuna valutazione finora
- Guía Laboratorio HidráulicaDocumento89 pagineGuía Laboratorio HidráulicaJean Paul Morales AltamiranoNessuna valutazione finora
- Formato 054 SeminarioDocumento7 pagineFormato 054 SeminarioMateo SaloNessuna valutazione finora
- Medio Ambiente y Construccion de CiudadaniaDocumento2 pagineMedio Ambiente y Construccion de CiudadaniaMateo SaloNessuna valutazione finora
- R - 2 Introducción Cap 1,2,3 2018-2Documento35 pagineR - 2 Introducción Cap 1,2,3 2018-2Mateo SaloNessuna valutazione finora
- Formato 054 SeminarioDocumento7 pagineFormato 054 SeminarioMateo SaloNessuna valutazione finora
- Formato 054 SeminarioDocumento7 pagineFormato 054 SeminarioMateo SaloNessuna valutazione finora
- Válvulas de Control PDFDocumento49 pagineVálvulas de Control PDFReNyy ChowNessuna valutazione finora
- R - 2 Introducción Cap 1,2,3 2018-2Documento35 pagineR - 2 Introducción Cap 1,2,3 2018-2Mateo SaloNessuna valutazione finora
- Medidor de ThomasDocumento3 pagineMedidor de ThomasMateo SaloNessuna valutazione finora
- Calibrado de Material de VidrioDocumento3 pagineCalibrado de Material de VidrioMateo SaloNessuna valutazione finora
- Medidor de ThomasDocumento3 pagineMedidor de ThomasMateo SaloNessuna valutazione finora
- Pautas Proyecto Diseño de Reactores UniatlanticoDocumento6 paginePautas Proyecto Diseño de Reactores UniatlanticoMateo SaloNessuna valutazione finora
- Bioetanol ProducciónDocumento2 pagineBioetanol ProducciónMateo SaloNessuna valutazione finora
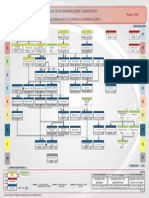
- Malla Curricular Ing QuimicaDocumento1 paginaMalla Curricular Ing QuimicaSamanta SilvaNessuna valutazione finora
- Propiedades Parciales MolaresDocumento30 paginePropiedades Parciales MolaresMateo SaloNessuna valutazione finora
- Tema 2 Forma de Expresar Los ResultadosDocumento24 pagineTema 2 Forma de Expresar Los ResultadosMateo SaloNessuna valutazione finora
- Lab Oratorio de As Aplicadas 2012Documento37 pagineLab Oratorio de As Aplicadas 2012Liceth M. Hernandez GonzalezNessuna valutazione finora
- PracticaDocumento4 paginePracticaOlga Lucero IllescasNessuna valutazione finora
- Taller 2 Iluminación - ModificacdoDocumento10 pagineTaller 2 Iluminación - ModificacdoangelicaNessuna valutazione finora
- Tesis Analisis Tiempo-HistoriaDocumento70 pagineTesis Analisis Tiempo-HistoriaMarcel Battle100% (5)
- Maquinas Camionminero 789dDocumento28 pagineMaquinas Camionminero 789dbracar23100% (2)
- Construcción antena Ringo 11mDocumento4 pagineConstrucción antena Ringo 11mKarla LpNessuna valutazione finora
- Guia n1 FMM007 2019Documento3 pagineGuia n1 FMM007 2019maxNessuna valutazione finora
- Deber de Estadistica Kevin TobarDocumento6 pagineDeber de Estadistica Kevin TobarDennis CastroNessuna valutazione finora
- Análisis de vigas isostáticas: Reacciones, momentos y flechasDocumento7 pagineAnálisis de vigas isostáticas: Reacciones, momentos y flechasAlejandro Pascual Eiras100% (2)
- PESO ESPECÌFICO-mecánica de SuelosDocumento8 paginePESO ESPECÌFICO-mecánica de SuelosErick Ccolque ChoquehuancaNessuna valutazione finora
- Informe Biofarmacia II Ciclo IDocumento16 pagineInforme Biofarmacia II Ciclo IAldo Jose Garcia CarmonaNessuna valutazione finora
- Guia de LaboratorioDocumento4 pagineGuia de LaboratorioAna Del NogalNessuna valutazione finora
- Aprenda Astrología Vol. 1 Principios Básicos Marion D. March y Joan McEversDocumento153 pagineAprenda Astrología Vol. 1 Principios Básicos Marion D. March y Joan McEversCamila Medail88% (17)
- Sistemas tubería flujo compresibleDocumento8 pagineSistemas tubería flujo compresibleAlex100% (1)
- Diagrama de fases Pb-SnDocumento26 pagineDiagrama de fases Pb-SnKevin YamunaqueNessuna valutazione finora
- Muscular (Resumen)Documento17 pagineMuscular (Resumen)Gabriel Zúñiga MartinezNessuna valutazione finora
- Ejercicios de trabajo y energíaDocumento4 pagineEjercicios de trabajo y energíajuniorNessuna valutazione finora
- Nomenclatura QuimicaDocumento13 pagineNomenclatura QuimicaVN GAMEPLAYSNessuna valutazione finora
- Linea de Tiempo Del Microscopio y EstetoscopioDocumento12 pagineLinea de Tiempo Del Microscopio y EstetoscopioJonathanConforme0% (1)
- Teoría de Circuitos, Curso CompletoDocumento211 pagineTeoría de Circuitos, Curso Completohusmaster25100% (14)
- Distribucion e PlantaDocumento33 pagineDistribucion e PlantaMargory Pierina Goicochea SuelpresNessuna valutazione finora
- Optimización del diseño de un horno de cochurado mediante el cálculo de su centroide y dimensiones óptimasDocumento14 pagineOptimización del diseño de un horno de cochurado mediante el cálculo de su centroide y dimensiones óptimasJohan Perez GordilloNessuna valutazione finora
- Tarea 5Documento5 pagineTarea 5Shalito MHNessuna valutazione finora
- Termodinámica de Una Celda GalvánicaDocumento4 pagineTermodinámica de Una Celda GalvánicaDaniel AndrésNessuna valutazione finora
- CH Conservacion PreventivaDocumento43 pagineCH Conservacion PreventivaRomina_Bevegni100% (1)
- Practica 1 Informe IndustrialesDocumento3 paginePractica 1 Informe IndustrialesPablitoSuntaNessuna valutazione finora
- 20152533F - Tarea N°3 - 2019-1Documento11 pagine20152533F - Tarea N°3 - 2019-1Anonymous 3xIiPsNessuna valutazione finora
- DurometroDocumento15 pagineDurometrokenyuNessuna valutazione finora
- Elevacion ManualDocumento8 pagineElevacion ManualSebastianSandovalVelascoNessuna valutazione finora
- Diagrama Interruptor SolarDocumento2 pagineDiagrama Interruptor Solar621018Nessuna valutazione finora
- Manual+VW+Embrague+Haldex+Polo Jetta Golf Pointer EspDocumento44 pagineManual+VW+Embrague+Haldex+Polo Jetta Golf Pointer EspOso Mugroso100% (1)