Potrebbero piacerti anche
- Beams and Framed Structures: Structures and Solid Body MechanicsDa EverandBeams and Framed Structures: Structures and Solid Body MechanicsValutazione: 3 su 5 stelle3/5 (2)
- Finite Element Analysis of Arch DamDocumento8 pagineFinite Element Analysis of Arch Damd4891Nessuna valutazione finora
- Physical Instability and Geometric Effects in FramesDocumento11 paginePhysical Instability and Geometric Effects in FramesIgnacio VillaNessuna valutazione finora
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsDa EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsNessuna valutazione finora
- 3d Stiffness MatrixDocumento38 pagine3d Stiffness MatrixTanmoy MukherjeeNessuna valutazione finora
- Barron's Physics Practice Plus: 400+ Online Questions and Quick Study ReviewDa EverandBarron's Physics Practice Plus: 400+ Online Questions and Quick Study ReviewNessuna valutazione finora
- (B4 & A4 2sided) (S.C. Goel 2004) - P.B. Design of Steel MRFs Using TARGET DRIFT & YIELD MECHANISM PDFDocumento14 pagine(B4 & A4 2sided) (S.C. Goel 2004) - P.B. Design of Steel MRFs Using TARGET DRIFT & YIELD MECHANISM PDFali mortazaviNessuna valutazione finora
- Multi-Objective Optimization of Reinforced Concrete Frames: Matěj LepšDocumento8 pagineMulti-Objective Optimization of Reinforced Concrete Frames: Matěj LepšxelmerxNessuna valutazione finora
- Difference Equations in Normed Spaces: Stability and OscillationsDa EverandDifference Equations in Normed Spaces: Stability and OscillationsNessuna valutazione finora
- ParkEtal05 DynamicOptimizationWithEquivStaticLoadsDocumento14 pagineParkEtal05 DynamicOptimizationWithEquivStaticLoadsJeff HNessuna valutazione finora
- Stress Analysis Problems in S.I. Units: The Commonwealth and International Library: Mechanical Engineering DivisionDa EverandStress Analysis Problems in S.I. Units: The Commonwealth and International Library: Mechanical Engineering DivisionValutazione: 2.5 su 5 stelle2.5/5 (4)
- 16 - Chapter 6 PDFDocumento39 pagine16 - Chapter 6 PDFDipankar NathNessuna valutazione finora
- Body Tensor Fields in Continuum Mechanics: With Applications to Polymer RheologyDa EverandBody Tensor Fields in Continuum Mechanics: With Applications to Polymer RheologyValutazione: 3 su 5 stelle3/5 (1)
- 16 - Chapter 6 PDFDocumento39 pagine16 - Chapter 6 PDFKoustav MajumdarNessuna valutazione finora
- Chapter-6 Structural Analysis Methods/design Approaches, Assumptions and Approximations For Practical Life Line StructureDocumento39 pagineChapter-6 Structural Analysis Methods/design Approaches, Assumptions and Approximations For Practical Life Line StructurenNessuna valutazione finora
- Structural Analysis of A Conventional 9-13 Mar 84Documento11 pagineStructural Analysis of A Conventional 9-13 Mar 84Muhammad Ahmad MustafaNessuna valutazione finora
- A New Model For Connections Between Skeletal and Continuum Structural ElementsDocumento12 pagineA New Model For Connections Between Skeletal and Continuum Structural ElementsshiraNessuna valutazione finora
- Chapter 4Documento5 pagineChapter 4leeNessuna valutazione finora
- Ziemian Et Al-2018-Steel ConstructionDocumento6 pagineZiemian Et Al-2018-Steel ConstructionHicham Said BoukhalkhalNessuna valutazione finora
- Minimization Approach To Limit Solutions of Plates: The University of Michigan, Ann Arbor, MI 48109, USADocumento10 pagineMinimization Approach To Limit Solutions of Plates: The University of Michigan, Ann Arbor, MI 48109, USAfefahimNessuna valutazione finora
- Fea - Ae 2017 PDFDocumento55 pagineFea - Ae 2017 PDFritastoicaNessuna valutazione finora
- 03 Ce225 Lecture Overview of Structural DynamicsDocumento47 pagine03 Ce225 Lecture Overview of Structural DynamicsEduardo OrozNessuna valutazione finora
- Structural DesignDocumento34 pagineStructural Designdave4359Nessuna valutazione finora
- CHAPTER 1 - Introduction To Finite Element Analysis - V2Documento45 pagineCHAPTER 1 - Introduction To Finite Element Analysis - V2Alias HedgeNessuna valutazione finora
- Project Topic: Prepared By:-: Structure Optimization (3712018)Documento30 pagineProject Topic: Prepared By:-: Structure Optimization (3712018)Vadid DhattiwalaNessuna valutazione finora
- Cee 456 HW1Documento3 pagineCee 456 HW1Anonymous AApi3XAqBFNessuna valutazione finora
- Pushover Simple MetodDocumento19 paginePushover Simple Metodmihailiviu77Nessuna valutazione finora
- Ultimate Strength AnalysisDocumento3 pagineUltimate Strength AnalysisChristian Gadicho QuintanaNessuna valutazione finora
- Arce504 FEM - ++++Documento84 pagineArce504 FEM - ++++Vijay KumarNessuna valutazione finora
- Dynamic Finite Element MethodsDocumento29 pagineDynamic Finite Element MethodsVns VnsNessuna valutazione finora
- 2order D CorrectedDocumento32 pagine2order D CorrectedslirpaNessuna valutazione finora
- Engineering Optimization: Theory and Application: Brief IntroductionDocumento12 pagineEngineering Optimization: Theory and Application: Brief IntroductionSouravik DuttaNessuna valutazione finora
- Trusses With MathematicaDocumento18 pagineTrusses With MathematicaBogdan Tanasoiu100% (1)
- A Simple and Effective Element For Analysis of General Shell StructuresDocumento9 pagineA Simple and Effective Element For Analysis of General Shell StructureszwozniakNessuna valutazione finora
- Concrete Slab Design Using Mathcad PDFDocumento7 pagineConcrete Slab Design Using Mathcad PDFDiaconu SofiaNessuna valutazione finora
- Limit Analysis Fast Methods For Assessment of Progressive Collapse Potential in RC Structures (Ioani, Et Al. 2013)Documento10 pagineLimit Analysis Fast Methods For Assessment of Progressive Collapse Potential in RC Structures (Ioani, Et Al. 2013)Jose ManuelNessuna valutazione finora
- Structural Analysis: Structures and LoadsDocumento13 pagineStructural Analysis: Structures and LoadsWint Thu HtunNessuna valutazione finora
- Chen Kawaguchi 2006 Optimization For Maximum Buckling Load of A Lattice Space Frame With Nonlinear Sensitivity AnalysisDocumento8 pagineChen Kawaguchi 2006 Optimization For Maximum Buckling Load of A Lattice Space Frame With Nonlinear Sensitivity AnalysiskgapuNessuna valutazione finora
- Structural Damage Localization by Combining Flexibility and Stiffness Matrix PDFDocumento10 pagineStructural Damage Localization by Combining Flexibility and Stiffness Matrix PDFMR. VYSHNAV V SNessuna valutazione finora
- Advanced Finite Element: Professor: Carlos FelippaDocumento42 pagineAdvanced Finite Element: Professor: Carlos FelippaHamed MemarianNessuna valutazione finora
- Structural Optimization Under Equivalent Static Loads Transformed From Dynamic Loads Based On DisplacementDocumento10 pagineStructural Optimization Under Equivalent Static Loads Transformed From Dynamic Loads Based On DisplacementNikNessuna valutazione finora
- Bem Project Must UseDocumento22 pagineBem Project Must UseFemi Richard FakoyaNessuna valutazione finora
- Fem NotesDocumento11 pagineFem NotesvenkiteshksNessuna valutazione finora
- A Review of Practical Approximate Inelastic Seismic Design Procedures For New and Existing BuildingsDocumento21 pagineA Review of Practical Approximate Inelastic Seismic Design Procedures For New and Existing Buildingsm_ganea268973Nessuna valutazione finora
- ESLM SMO October 2017 PREPRINTDocumento27 pagineESLM SMO October 2017 PREPRINTalfreliaNessuna valutazione finora
- Stiffened Plate Bending Analysis by The Boundary Element MethodDocumento7 pagineStiffened Plate Bending Analysis by The Boundary Element Methodsagar1503Nessuna valutazione finora
- Stability Chapter 05Documento8 pagineStability Chapter 05abimalainNessuna valutazione finora
- 12 Multiobjective Optimization of Space Structures Under Static and Seismic Loading ConditionsDocumento28 pagine12 Multiobjective Optimization of Space Structures Under Static and Seismic Loading ConditionsxelmerxNessuna valutazione finora
- Sehagic Medic - GNP2012Documento8 pagineSehagic Medic - GNP2012senad medicNessuna valutazione finora
- Icmsm 2006 PDFDocumento27 pagineIcmsm 2006 PDFJuan Carlos Torres HernándezNessuna valutazione finora
- Topological Optimization of Beam Cross Section by Employing Extrusion ConstraintDocumento11 pagineTopological Optimization of Beam Cross Section by Employing Extrusion ConstraintGogyNessuna valutazione finora
- 4987 PDFDocumento8 pagine4987 PDFBeatriz BarbozaNessuna valutazione finora
- 1 Theory andDocumento5 pagine1 Theory andStanislav Neo MilovanovicNessuna valutazione finora
- Theory andDocumento20 pagineTheory andStanislav Neo MilovanovicNessuna valutazione finora
- Analysis & Design of Prestressed Shell Type Structure Using Finite Element MethodDocumento7 pagineAnalysis & Design of Prestressed Shell Type Structure Using Finite Element MethodHilary WatsonNessuna valutazione finora
- UNITEN ICCBT 08 Nonlinear Static Pushover Analysis in Earthquake EngineeringDocumento12 pagineUNITEN ICCBT 08 Nonlinear Static Pushover Analysis in Earthquake EngineeringIngeniero Emmanuel RodriguezNessuna valutazione finora
- Savoia M., Ferracuti B., Pinho R., Serpieri Maurizio - Force/Torque Pushover Method For Plan Irregular StructuresDocumento12 pagineSavoia M., Ferracuti B., Pinho R., Serpieri Maurizio - Force/Torque Pushover Method For Plan Irregular StructuresIng. Maurizio SerpieriNessuna valutazione finora
- Behavior of Reinforced Concrete Columns Under Combined Effects of Axial and Blast-Induced Transverse LoadsDocumento9 pagineBehavior of Reinforced Concrete Columns Under Combined Effects of Axial and Blast-Induced Transverse LoadsAhmed SalimNessuna valutazione finora
- Mechanical DesignDocumento190 pagineMechanical DesignAbdirazak MohamedNessuna valutazione finora
- Sheet OneDocumento4 pagineSheet OneAbdirazak MohamedNessuna valutazione finora
- Item NO Description of Work Unit QTY Unit Cost: Borama /BURCODocumento14 pagineItem NO Description of Work Unit QTY Unit Cost: Borama /BURCOAbdirazak MohamedNessuna valutazione finora
- Item NO Description of Work Unit QTY Unit Cost: BoramaDocumento12 pagineItem NO Description of Work Unit QTY Unit Cost: BoramaAbdirazak MohamedNessuna valutazione finora
- J88hWM9lpMs0 - REVISED LETTER OF BIDDocumento2 pagineJ88hWM9lpMs0 - REVISED LETTER OF BIDAbdirazak MohamedNessuna valutazione finora
- Dhismaha Xeyndaabka Madarka Borama: Description Meshwire Fence Temporary Works & Site ClearanceDocumento8 pagineDhismaha Xeyndaabka Madarka Borama: Description Meshwire Fence Temporary Works & Site ClearanceAbdirazak MohamedNessuna valutazione finora
- Introduction of The CompanyDocumento5 pagineIntroduction of The CompanyAbdirazak MohamedNessuna valutazione finora
- OCR - Attachment A - Offer Letter and Bid FormDocumento13 pagineOCR - Attachment A - Offer Letter and Bid FormAbdirazak MohamedNessuna valutazione finora
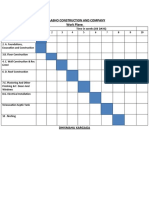
- Work Plane For Wasarada DeegankaDocumento1 paginaWork Plane For Wasarada DeegankaAbdirazak MohamedNessuna valutazione finora
- ID Name Fin. Institution A/c Number License ExpiryDocumento2 pagineID Name Fin. Institution A/c Number License ExpiryAbdirazak MohamedNessuna valutazione finora
- 1.EOI Website Content - MHE ServicesDocumento2 pagine1.EOI Website Content - MHE ServicesAbdirazak MohamedNessuna valutazione finora
- Description Moniter Hall SQM SQM Ls Subtotal Stage SQM SQM SQM SQM Subtotal Civil Work For Two Rooms SQM SQM Ls Subtotal Fence Wall CM SQM SQM SQMDocumento4 pagineDescription Moniter Hall SQM SQM Ls Subtotal Stage SQM SQM SQM SQM Subtotal Civil Work For Two Rooms SQM SQM Ls Subtotal Fence Wall CM SQM SQM SQMAbdirazak MohamedNessuna valutazione finora
- Construction of The Lughaya Fishing CenterDocumento4 pagineConstruction of The Lughaya Fishing CenterAbdirazak MohamedNessuna valutazione finora
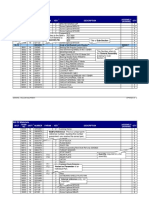
- Schedule of Columns at Level - 4500: Ajay Kadam AssociatesDocumento1 paginaSchedule of Columns at Level - 4500: Ajay Kadam AssociatesAbdirazak MohamedNessuna valutazione finora
- Form B2 Form of Tender: Qor Iyado Qoral Ah Inta Grand Totalka Ku Taala Oo Af English AhDocumento10 pagineForm B2 Form of Tender: Qor Iyado Qoral Ah Inta Grand Totalka Ku Taala Oo Af English AhAbdirazak MohamedNessuna valutazione finora
- Bidding Docs From MoPWH&T - SLDocumento38 pagineBidding Docs From MoPWH&T - SLAbdirazak MohamedNessuna valutazione finora
- SaxardiidDocumento2 pagineSaxardiidAbdirazak MohamedNessuna valutazione finora
- Ali Construction Company: 90 Days DaysDocumento1 paginaAli Construction Company: 90 Days DaysAbdirazak MohamedNessuna valutazione finora
- Baxsan Construction Company: 100 DAYS DaysDocumento1 paginaBaxsan Construction Company: 100 DAYS DaysAbdirazak MohamedNessuna valutazione finora
- Presentation 1Documento27 paginePresentation 1Abdirazak MohamedNessuna valutazione finora
- National Mental Health Drugs QuatationDocumento5 pagineNational Mental Health Drugs QuatationAbdirazak MohamedNessuna valutazione finora
- Laascanood WARD MAN ROOM Foundation Works: Bill of Quantities (BOQ) OUTPATIENTDocumento8 pagineLaascanood WARD MAN ROOM Foundation Works: Bill of Quantities (BOQ) OUTPATIENTAbdirazak MohamedNessuna valutazione finora
- Bill of Quantities No. Descripitions 10 Earth Work and Foundation PlanDocumento6 pagineBill of Quantities No. Descripitions 10 Earth Work and Foundation PlanAbdirazak MohamedNessuna valutazione finora
- No Description Unit Rate Amount: Qty Site ClearanceDocumento2 pagineNo Description Unit Rate Amount: Qty Site ClearanceAbdirazak MohamedNessuna valutazione finora
- Dhismaha Xeyndaabka Madarka Borama: Description Meshwire Fence Temporary Works & Site ClearanceDocumento4 pagineDhismaha Xeyndaabka Madarka Borama: Description Meshwire Fence Temporary Works & Site ClearanceAbdirazak MohamedNessuna valutazione finora
- Questioner Oo Dhamays TiranDocumento6 pagineQuestioner Oo Dhamays TiranAbdirazak MohamedNessuna valutazione finora
- Item NO Description of Work Unit QTY Unit Cost: Borama /BURCODocumento10 pagineItem NO Description of Work Unit QTY Unit Cost: Borama /BURCOAbdirazak MohamedNessuna valutazione finora
- Wareejin Bid DocumentsDocumento1 paginaWareejin Bid DocumentsAbdirazak MohamedNessuna valutazione finora
- National Tender Board: Guddida Qandaraasyadda QarankaDocumento3 pagineNational Tender Board: Guddida Qandaraasyadda QarankaAbdirazak MohamedNessuna valutazione finora
- National Tender Board: Guddida Qandaraasyadda QarankaDocumento2 pagineNational Tender Board: Guddida Qandaraasyadda QarankaAbdirazak MohamedNessuna valutazione finora
- Ap, Lrrsisal of Roentgenograph, Ic: I SsayDocumento30 pagineAp, Lrrsisal of Roentgenograph, Ic: I SsayMindaugasStacevičiusNessuna valutazione finora
- ELS 06 Maret 223Documento16 pagineELS 06 Maret 223Tri WinarsoNessuna valutazione finora
- Precision CatalogDocumento256 paginePrecision CatalogImad AghilaNessuna valutazione finora
- Maintenance Páginas-509-580Documento72 pagineMaintenance Páginas-509-580Alexandra Gabriela Pacheco PrietoNessuna valutazione finora
- Esterification Oil of WintergreenDocumento8 pagineEsterification Oil of WintergreenMaria MahusayNessuna valutazione finora
- English2 Q2 Summative Assessment 4 2Documento4 pagineEnglish2 Q2 Summative Assessment 4 2ALNIE PANGANIBANNessuna valutazione finora
- Exam 3 DynamicsDocumento7 pagineExam 3 DynamicsJulioNessuna valutazione finora
- Metaphysics of LucretiusDocumento6 pagineMetaphysics of LucretiusChristopher BennettNessuna valutazione finora
- Javanese PeopleDocumento22 pagineJavanese PeopleDenisaNessuna valutazione finora
- Surface Finish Measurement NotesDocumento32 pagineSurface Finish Measurement NotesAneez ShresthaNessuna valutazione finora
- Atomic St. Package PDFDocumento28 pagineAtomic St. Package PDFSatvik RaoNessuna valutazione finora
- Prevailing Torque Locknut Technical SpecificationsDocumento3 paginePrevailing Torque Locknut Technical SpecificationsLiu YangtzeNessuna valutazione finora
- WeeklyDocumento8 pagineWeeklyivaldeztNessuna valutazione finora
- Tabla9 1Documento1 paginaTabla9 1everquinNessuna valutazione finora
- Carrefour-SA Shopping Center TurkeyDocumento2 pagineCarrefour-SA Shopping Center TurkeyVineet JogalekarNessuna valutazione finora
- GBJ0232 - en GLX 3101 T2Documento43 pagineGBJ0232 - en GLX 3101 T2mnbvqwert100% (2)
- Eco Exercise 3answer Ans 1Documento8 pagineEco Exercise 3answer Ans 1Glory PrintingNessuna valutazione finora
- Preview: Proquest Dissertations and Theses 2002 Proquest Dissertations & Theses Full TextDocumento24 paginePreview: Proquest Dissertations and Theses 2002 Proquest Dissertations & Theses Full TextFelipe AguilarNessuna valutazione finora
- Chapter 7 - Stress - TransformationsDocumento21 pagineChapter 7 - Stress - TransformationsroselleNessuna valutazione finora
- Kimi No Na Wa LibropdfDocumento150 pagineKimi No Na Wa LibropdfSarangapani BorahNessuna valutazione finora
- 1F-Korean-Nami Mun - Miles From NowhereDocumento4 pagine1F-Korean-Nami Mun - Miles From NowhereNeil PatelNessuna valutazione finora
- Adriano Costa Sampaio: Electrical EngineerDocumento3 pagineAdriano Costa Sampaio: Electrical EngineeradrianorexNessuna valutazione finora
- Metal Workers BizHouse - UkDocumento3 pagineMetal Workers BizHouse - UkAlex BekeNessuna valutazione finora
- FactSet London OfficeDocumento1 paginaFactSet London OfficeDaniyar KaliyevNessuna valutazione finora
- Petersen Coils Basic 20principle and ApplicationDocumento3 paginePetersen Coils Basic 20principle and ApplicationasotozuazuaNessuna valutazione finora
- Management of DredgedExcavated SedimentDocumento17 pagineManagement of DredgedExcavated SedimentMan Ho LamNessuna valutazione finora
- Danika Cristoal 18aDocumento4 pagineDanika Cristoal 18aapi-462148990Nessuna valutazione finora
- YoungMan EN131 GUIDEDocumento16 pagineYoungMan EN131 GUIDErcpawar100% (1)
- End of Summer Course Test August 2021Documento16 pagineEnd of Summer Course Test August 2021Thanh Nguyen vanNessuna valutazione finora
- Compiled LecsDocumento24 pagineCompiled LecsNur SetsuNessuna valutazione finora
- Python Programming For Beginners: Learn The Basics Of Python Programming (Python Crash Course, Programming for Dummies)Da EverandPython Programming For Beginners: Learn The Basics Of Python Programming (Python Crash Course, Programming for Dummies)Valutazione: 5 su 5 stelle5/5 (1)
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Da EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Valutazione: 5 su 5 stelle5/5 (34)
- Machine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepDa EverandMachine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepValutazione: 4.5 su 5 stelle4.5/5 (19)
- Excel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceDa EverandExcel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceNessuna valutazione finora
- Blockchain Basics: A Non-Technical Introduction in 25 StepsDa EverandBlockchain Basics: A Non-Technical Introduction in 25 StepsValutazione: 4.5 su 5 stelle4.5/5 (24)
- Clean Code: A Handbook of Agile Software CraftsmanshipDa EverandClean Code: A Handbook of Agile Software CraftsmanshipValutazione: 5 su 5 stelle5/5 (13)
- How to Make a Video Game All By Yourself: 10 steps, just you and a computerDa EverandHow to Make a Video Game All By Yourself: 10 steps, just you and a computerValutazione: 5 su 5 stelle5/5 (1)
- Grokking Algorithms: An illustrated guide for programmers and other curious peopleDa EverandGrokking Algorithms: An illustrated guide for programmers and other curious peopleValutazione: 4 su 5 stelle4/5 (16)
- Once Upon an Algorithm: How Stories Explain ComputingDa EverandOnce Upon an Algorithm: How Stories Explain ComputingValutazione: 4 su 5 stelle4/5 (43)
- GAMEDEV: 10 Steps to Making Your First Game SuccessfulDa EverandGAMEDEV: 10 Steps to Making Your First Game SuccessfulValutazione: 4.5 su 5 stelle4.5/5 (12)
- Understanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerDa EverandUnderstanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerValutazione: 4.5 su 5 stelle4.5/5 (44)
- Software Development: BCS Level 4 Certificate in IT study guideDa EverandSoftware Development: BCS Level 4 Certificate in IT study guideValutazione: 3.5 su 5 stelle3.5/5 (2)
- Coders at Work: Reflections on the Craft of ProgrammingDa EverandCoders at Work: Reflections on the Craft of ProgrammingValutazione: 4 su 5 stelle4/5 (151)
- Nine Algorithms That Changed the Future: The Ingenious Ideas That Drive Today's ComputersDa EverandNine Algorithms That Changed the Future: The Ingenious Ideas That Drive Today's ComputersValutazione: 5 su 5 stelle5/5 (7)
- The Advanced Roblox Coding Book: An Unofficial Guide, Updated Edition: Learn How to Script Games, Code Objects and Settings, and Create Your Own World!Da EverandThe Advanced Roblox Coding Book: An Unofficial Guide, Updated Edition: Learn How to Script Games, Code Objects and Settings, and Create Your Own World!Valutazione: 4.5 su 5 stelle4.5/5 (2)
- What Algorithms Want: Imagination in the Age of ComputingDa EverandWhat Algorithms Want: Imagination in the Age of ComputingValutazione: 3.5 su 5 stelle3.5/5 (41)
- Software Engineering at Google: Lessons Learned from Programming Over TimeDa EverandSoftware Engineering at Google: Lessons Learned from Programming Over TimeValutazione: 4 su 5 stelle4/5 (11)
- Django Unleashed: Building Web Applications with Python's FrameworkDa EverandDjango Unleashed: Building Web Applications with Python's FrameworkNessuna valutazione finora