Potrebbero piacerti anche
- Books - EPRI Distribution Planning Guidebook PDFDocumento254 pagineBooks - EPRI Distribution Planning Guidebook PDFSaleem100% (2)
- 07 Fenton SimulationDocumento52 pagine07 Fenton SimulationAndres Pino100% (2)
- Var and Stress TestingDocumento59 pagineVar and Stress TestingTariq Khan100% (1)
- Adsorption Locator Guide: Materials Studio 2017Documento39 pagineAdsorption Locator Guide: Materials Studio 2017AtomuusNessuna valutazione finora
- 2018 04 16 Tertiary Winding in Transformers PRCDocumento17 pagine2018 04 16 Tertiary Winding in Transformers PRCSaurav Kafle100% (1)
- Operations Management and Systems EngineeringDocumento253 pagineOperations Management and Systems EngineeringWahyu S RahmanNessuna valutazione finora
- Risk Assessment and Management in Construction Projects Full Thesis PDFDocumento81 pagineRisk Assessment and Management in Construction Projects Full Thesis PDFzakria100100100% (1)
- Intelligent Data AnalysisDocumento367 pagineIntelligent Data AnalysisJoseh Tenylson G. Rodrigues100% (1)
- EPRECDocumento14 pagineEPRECNasir RehmanNessuna valutazione finora
- Post-Outage State Estimations For Outage ManagementDocumento5 paginePost-Outage State Estimations For Outage ManagementSlimane SouagNessuna valutazione finora
- Interdigi4 PDFDocumento6 pagineInterdigi4 PDFSanthos KumarNessuna valutazione finora
- 219 E603Documento4 pagine219 E603ptarwatkarNessuna valutazione finora
- Multi-Objective Optimization of Automotive Front Rail Based On Surrogate Model and NSGA-IIDocumento10 pagineMulti-Objective Optimization of Automotive Front Rail Based On Surrogate Model and NSGA-IIhaceneNessuna valutazione finora
- Estimation of Transmission Lines Parameters Using Particle Swarm OptimizationDocumento5 pagineEstimation of Transmission Lines Parameters Using Particle Swarm OptimizationMarchena Segil ErikNessuna valutazione finora
- Robust Control Design For Maglev Train With Parametric Uncertainties Using - SynthesisDocumento7 pagineRobust Control Design For Maglev Train With Parametric Uncertainties Using - SynthesisRaj PurohitNessuna valutazione finora
- Single Axis Text I J Mic 08075 FinalDocumento26 pagineSingle Axis Text I J Mic 08075 Finalali almorsedNessuna valutazione finora
- A Brief Review of Laplace TransformsDocumento10 pagineA Brief Review of Laplace TransformsSupriya AnandNessuna valutazione finora
- Estimation of Equivalent Model Parameters For Lifeo Batteries Based On Particle Swarm OptimizationDocumento5 pagineEstimation of Equivalent Model Parameters For Lifeo Batteries Based On Particle Swarm OptimizationRadu ConstantinNessuna valutazione finora
- Simulation of A Copper Micro-Wire Drawing For ElecDocumento6 pagineSimulation of A Copper Micro-Wire Drawing For ElecAravind VishweshwaraNessuna valutazione finora
- Modelling and Identification of A Non-Linear Saturated Magnetic Circuit: Theoretical Study and Experimental ResultsDocumento14 pagineModelling and Identification of A Non-Linear Saturated Magnetic Circuit: Theoretical Study and Experimental ResultsGustavo LimaNessuna valutazione finora
- Optimal Control of DC Motor Using Performance Index of EnergyDocumento5 pagineOptimal Control of DC Motor Using Performance Index of EnergyAlionNessuna valutazione finora
- AEE 68 1 2019 - Art - 8Documento14 pagineAEE 68 1 2019 - Art - 8Ali ErNessuna valutazione finora
- DC-Lab Report 04Documento8 pagineDC-Lab Report 04Shahriar Ahsan JohaNessuna valutazione finora
- Gain Optimization of A Multi-Layer Printed Dipole Array Using Evolutionary ProgrammingDocumento4 pagineGain Optimization of A Multi-Layer Printed Dipole Array Using Evolutionary ProgrammingA. VillaNessuna valutazione finora
- Minimizing Active Power LossesDocumento8 pagineMinimizing Active Power LossesChelsea wijayasanthaNessuna valutazione finora
- Final Exam - SampleDocumento4 pagineFinal Exam - SampleAhmed MashhoorNessuna valutazione finora
- Rasheef Maths AssignmantDocumento10 pagineRasheef Maths AssignmantMohamed SanoosNessuna valutazione finora
- Li Ion Battery State of Charge SoC Estimation With Stochastic MethodsDocumento7 pagineLi Ion Battery State of Charge SoC Estimation With Stochastic MethodsBasil Azeem ed20b009Nessuna valutazione finora
- EE Mock Test-2 Modes of Heat Transfer 3 Ac Theory Module04 DC Theory Module 58iDocumento21 pagineEE Mock Test-2 Modes of Heat Transfer 3 Ac Theory Module04 DC Theory Module 58iAnonymous 8pCXXsNessuna valutazione finora
- De AssignmentDocumento19 pagineDe AssignmentMuhammad UzairNessuna valutazione finora
- Ghatak ResearchDocumento6 pagineGhatak ResearchAkshay GuptaNessuna valutazione finora
- IET Modeling Stability ResonantDocumento17 pagineIET Modeling Stability Resonantseyed mohsen SalehiNessuna valutazione finora
- Distributed Consensus Control For Networks of Second-Order AgentsDocumento6 pagineDistributed Consensus Control For Networks of Second-Order Agentstuvantoan17Nessuna valutazione finora
- EMTP Modelling of Grounding Electrodes PDFDocumento4 pagineEMTP Modelling of Grounding Electrodes PDFCesar ZamudioNessuna valutazione finora
- Diname2019 Extended Abstract2Documento4 pagineDiname2019 Extended Abstract2DAVID HERBERT LUCAS LOYOLANessuna valutazione finora
- GATE EC 2017 (Set - 2) QuestionsDocumento8 pagineGATE EC 2017 (Set - 2) QuestionsZakariya MohammedNessuna valutazione finora
- Modeling and Simulation of A Series Resonant InverterDocumento6 pagineModeling and Simulation of A Series Resonant InverterkaaisNessuna valutazione finora
- Design of Optimal PID Controller For Inverted Pendulum Using Genetic AlgorithmDocumento3 pagineDesign of Optimal PID Controller For Inverted Pendulum Using Genetic AlgorithmPhuongle LeNessuna valutazione finora
- On The Capacitated Vehicle Routing Problem: Springer-Verlag 2002Documento17 pagineOn The Capacitated Vehicle Routing Problem: Springer-Verlag 2002Kevin FinkenzellerNessuna valutazione finora
- Collection of Power Flow Models: Mathematical Formulations: 1 NomenclatureDocumento19 pagineCollection of Power Flow Models: Mathematical Formulations: 1 NomenclatureMichelle Maceas HenaoNessuna valutazione finora
- Me2009 - Control System Technology Lab Assignment 4: Hochiminh City University of Technology Mechatronics DepartmentDocumento10 pagineMe2009 - Control System Technology Lab Assignment 4: Hochiminh City University of Technology Mechatronics DepartmentNguyễn Hồng MỹNessuna valutazione finora
- 1 s2.0 S2211379723000876 MainDocumento29 pagine1 s2.0 S2211379723000876 MainSajjad AliNessuna valutazione finora
- Blanchard Kahn (1980)Documento8 pagineBlanchard Kahn (1980)Luis Antonio La Torre QuinteroNessuna valutazione finora
- Improved Empirical DC I-V Model For 4H-Sic Mesfets: Science in China Series F: Information SciencesDocumento9 pagineImproved Empirical DC I-V Model For 4H-Sic Mesfets: Science in China Series F: Information SciencesAsad AliNessuna valutazione finora
- Experiment No.03: Mathematical Modeling of Physical System: ObjectiveDocumento5 pagineExperiment No.03: Mathematical Modeling of Physical System: ObjectiveSao SavathNessuna valutazione finora
- Modeling and Optimization of Piezoelectric Energy HarvestingDocumento12 pagineModeling and Optimization of Piezoelectric Energy HarvestingadeijNessuna valutazione finora
- Mca 01 00066Documento7 pagineMca 01 00066djkeags24Nessuna valutazione finora
- Waterloo Conference 2017Documento8 pagineWaterloo Conference 2017Raj DevroyNessuna valutazione finora
- Multiple-Rank Modifications of A Sparse Cholesky FactorizationDocumento18 pagineMultiple-Rank Modifications of A Sparse Cholesky FactorizationAnonymous rOVY1dINessuna valutazione finora
- EP-Based Optimisation For Estimating Synchronising and Damping Torque CoefficientsDocumento7 pagineEP-Based Optimisation For Estimating Synchronising and Damping Torque CoefficientsSaddam HussainNessuna valutazione finora
- Artigos COBEP - FelipeDocumento6 pagineArtigos COBEP - Felipefelipe costaNessuna valutazione finora
- A Discussion About The Improvement of Finite Element Analysis Units of Castellated Beam (2012)Documento5 pagineA Discussion About The Improvement of Finite Element Analysis Units of Castellated Beam (2012)Adnan NajemNessuna valutazione finora
- APR2013P21Documento63 pagineAPR2013P21qsashutoshNessuna valutazione finora
- Response of A Continuous Guideway On Equally Spaced Supports Traversed by A Moving VehicleDocumento7 pagineResponse of A Continuous Guideway On Equally Spaced Supports Traversed by A Moving VehicleanirbanNessuna valutazione finora
- Model Set 2 FeaDocumento2 pagineModel Set 2 FeaKalai ArasanNessuna valutazione finora
- NEWLab1 Servo2 v5 LabManualDocumento9 pagineNEWLab1 Servo2 v5 LabManualkrups1991Nessuna valutazione finora
- DoxsDocumento14 pagineDoxsTALHA SALEEMNessuna valutazione finora
- Articol Munteanu NemesDocumento6 pagineArticol Munteanu NemesflmuntNessuna valutazione finora
- Equivalent Circuit Models Using CPE For ImpedanceDocumento23 pagineEquivalent Circuit Models Using CPE For Impedancedevshuk.p1Nessuna valutazione finora
- Pi 2007 - QP PDFDocumento16 paginePi 2007 - QP PDFN Dhanunjaya Rao BorraNessuna valutazione finora
- Torque Production in Permanent-MagnetDocumento6 pagineTorque Production in Permanent-MagnetTien Dung TranNessuna valutazione finora
- Stochastically Perturbed Hopf Bifurcation: N. Sri NamachchivayaDocumento10 pagineStochastically Perturbed Hopf Bifurcation: N. Sri NamachchivayahappelNessuna valutazione finora
- Advance Vlsi Devices and Technology Project ReportDocumento14 pagineAdvance Vlsi Devices and Technology Project ReportDileep MalgireddyNessuna valutazione finora
- 主轴轴承系统的最优设计Documento6 pagine主轴轴承系统的最优设计中国心Nessuna valutazione finora
- A Uniform Line Model For Non-Uniform Single-Phase Lines With Frequency Dependent Electrical ParametersDocumento6 pagineA Uniform Line Model For Non-Uniform Single-Phase Lines With Frequency Dependent Electrical ParametersItalo ChiarellaNessuna valutazione finora
- EE 312 Lecture 1Documento12 pagineEE 312 Lecture 1دكتور كونوهاNessuna valutazione finora
- Analysis and Modeling of Coplanar Strip Line PDFDocumento38 pagineAnalysis and Modeling of Coplanar Strip Line PDFRajbala SolankiNessuna valutazione finora
- Flux Imbalances in Push Pull ConverterDocumento5 pagineFlux Imbalances in Push Pull ConverterEngr Fahimuddin QureshiNessuna valutazione finora
- Interpretation of Gases Generated in Mineral OilDocumento32 pagineInterpretation of Gases Generated in Mineral OilEngr Fahimuddin QureshiNessuna valutazione finora
- Push - Pull Converter - 5 - B - H - Cruve - Transformer - Design - UpdatedDocumento24 paginePush - Pull Converter - 5 - B - H - Cruve - Transformer - Design - UpdatedEngr Fahimuddin QureshiNessuna valutazione finora
- Push - Pull Converter - 4 - Wavforms - Voltage - StressDocumento18 paginePush - Pull Converter - 4 - Wavforms - Voltage - StressEngr Fahimuddin QureshiNessuna valutazione finora
- Effect of Z Tolerance and - Z Variation On Short CircuitDocumento3 pagineEffect of Z Tolerance and - Z Variation On Short CircuitEngr Fahimuddin QureshiNessuna valutazione finora
- Homework 5Documento4 pagineHomework 5Engr Fahimuddin QureshiNessuna valutazione finora
- Time Synchronization of Relays at NTDC Grid Stations-1Documento1 paginaTime Synchronization of Relays at NTDC Grid Stations-1Engr Fahimuddin QureshiNessuna valutazione finora
- Distance Protection (Zone 2 Consideration)Documento1 paginaDistance Protection (Zone 2 Consideration)Engr Fahimuddin QureshiNessuna valutazione finora
- OSHA Safety ManualDocumento278 pagineOSHA Safety ManualEngr Fahimuddin QureshiNessuna valutazione finora
- Conference 101719Documento3 pagineConference 101719Engr Fahimuddin QureshiNessuna valutazione finora
- CT Sizing - CT Over Dimensioning FactorDocumento19 pagineCT Sizing - CT Over Dimensioning FactorEngr Fahimuddin QureshiNessuna valutazione finora
- HVDC Links in System OperationsDocumento81 pagineHVDC Links in System OperationsUtopia BogdanNessuna valutazione finora
- Mho Relay 2 PDFDocumento8 pagineMho Relay 2 PDFArion BaboolalNessuna valutazione finora
- Diagnostics of Winding Deformation in A Single-PhaDocumento4 pagineDiagnostics of Winding Deformation in A Single-PhaEngr Fahimuddin QureshiNessuna valutazione finora
- Article Download 1Documento6 pagineArticle Download 1Engr Fahimuddin QureshiNessuna valutazione finora
- Short Circuit Study 11Documento5 pagineShort Circuit Study 11Engr Fahimuddin QureshiNessuna valutazione finora
- Performance Analysis of Distance Relay On Shunt - Series Facts-CompDocumento106 paginePerformance Analysis of Distance Relay On Shunt - Series Facts-CompEngr Fahimuddin QureshiNessuna valutazione finora
- Investigation of A Transferred Voltage Surge Trbusic 19IPST033Documento5 pagineInvestigation of A Transferred Voltage Surge Trbusic 19IPST033Engr Fahimuddin QureshiNessuna valutazione finora
- AuthorproofspringerDocumento19 pagineAuthorproofspringerEngr Fahimuddin QureshiNessuna valutazione finora
- What To Do If Your Team Is Underperforming ABP Fahimuddin QureshiDocumento41 pagineWhat To Do If Your Team Is Underperforming ABP Fahimuddin QureshiEngr Fahimuddin QureshiNessuna valutazione finora
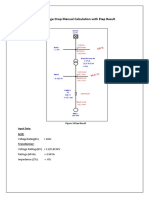
- Cable Voltage Drop CalculationDocumento3 pagineCable Voltage Drop CalculationEngr Fahimuddin QureshiNessuna valutazione finora
- Short Circuit Study 11Documento5 pagineShort Circuit Study 11Engr Fahimuddin QureshiNessuna valutazione finora
- Case StudyDocumento8 pagineCase StudyEngr Fahimuddin QureshiNessuna valutazione finora
- Cable Schedule For Low Impedance Bus Bar Protection PanelDocumento4 pagineCable Schedule For Low Impedance Bus Bar Protection PanelEngr Fahimuddin QureshiNessuna valutazione finora
- Csa - Cia - MalikDocumento26 pagineCsa - Cia - MalikEngr Fahimuddin QureshiNessuna valutazione finora
- CSA Report Fahim FinalDocumento9 pagineCSA Report Fahim FinalEngr Fahimuddin QureshiNessuna valutazione finora
- Article Base Presentation Final 1Documento26 pagineArticle Base Presentation Final 1Engr Fahimuddin QureshiNessuna valutazione finora
- Who Is Telling The Truth FinalDocumento41 pagineWho Is Telling The Truth FinalEngr Fahimuddin Qureshi100% (1)
- Ex 12 HLOOKUPDocumento2 pagineEx 12 HLOOKUPEngr Fahimuddin QureshiNessuna valutazione finora
- Big Data Analytics - With An Infusion of StatisticDocumento13 pagineBig Data Analytics - With An Infusion of StatisticAljin FaustinoNessuna valutazione finora
- UNIT - IV (Simulation)Documento18 pagineUNIT - IV (Simulation)ram84322100% (1)
- Sign Language TranslationDocumento23 pagineSign Language Translation陳子彤Nessuna valutazione finora
- Introduction To Operations Management: Utdallas - Edu/ MetinDocumento28 pagineIntroduction To Operations Management: Utdallas - Edu/ Metinalisnowkiss6570Nessuna valutazione finora
- Efficient Simulation and Integrated Likelihood TVP VarDocumento20 pagineEfficient Simulation and Integrated Likelihood TVP VarazertyNessuna valutazione finora
- Gears Design With Shape Uncertainties Using Monte Carlo SimulationsDocumento14 pagineGears Design With Shape Uncertainties Using Monte Carlo SimulationsZvonko TNessuna valutazione finora
- Simulation BooDocumento378 pagineSimulation BooMitik BiruNessuna valutazione finora
- James ZieglerDocumento2 pagineJames Zieglertidjani86Nessuna valutazione finora
- Simulation Probs UploadedDocumento3 pagineSimulation Probs UploadedSiddarthanSrtNessuna valutazione finora
- Monte Carlo - Cash Budget Models Outline and CorrelationsDocumento13 pagineMonte Carlo - Cash Budget Models Outline and CorrelationsphanhailongNessuna valutazione finora
- Applying Monte Carlo Simulation To Launch Vehicle Design and Requirements VerificationDocumento10 pagineApplying Monte Carlo Simulation To Launch Vehicle Design and Requirements VerificationLeave it to ChanceNessuna valutazione finora
- Ocean Engineering: Marcelo A.S. NevesDocumento9 pagineOcean Engineering: Marcelo A.S. Nevesjsouza16Nessuna valutazione finora
- Hafeez Allan Agboola, Et AlDocumento20 pagineHafeez Allan Agboola, Et Algoutam_trip_acharjeeNessuna valutazione finora
- MCE321 Lecture Note 4Documento43 pagineMCE321 Lecture Note 4Samuel UririNessuna valutazione finora
- Power Estimation Due To Switching (Lecture 2 To Lecture 5)Documento82 paginePower Estimation Due To Switching (Lecture 2 To Lecture 5)Mayank MeenaNessuna valutazione finora
- Monte Carlo Methods in Quantitative Finance Generic and Efficient MC Solver in C++Documento4 pagineMonte Carlo Methods in Quantitative Finance Generic and Efficient MC Solver in C++elz0rr0Nessuna valutazione finora
- Chapter 14 Simulation Modeling: Quantitative Analysis For Management, 11e (Render)Documento20 pagineChapter 14 Simulation Modeling: Quantitative Analysis For Management, 11e (Render)Jay BrockNessuna valutazione finora
- Chapter 5 - Risk Identification in Hydro Power ProjectsDocumento59 pagineChapter 5 - Risk Identification in Hydro Power ProjectsEmmanuel C ChisowaNessuna valutazione finora
- IntrostatDocumento16 pagineIntrostatAntonio CastellanosNessuna valutazione finora
- MCMC Methods For Multi-Response Generalized LinearDocumento22 pagineMCMC Methods For Multi-Response Generalized LinearkyotopinheiroNessuna valutazione finora
- Monte Carlo My Presentation PDFDocumento11 pagineMonte Carlo My Presentation PDFRASHMINessuna valutazione finora
- Modelling The Relative Permittivity of Anisotropic Insulating CompositesDocumento6 pagineModelling The Relative Permittivity of Anisotropic Insulating CompositesBardok MendozaNessuna valutazione finora
- DCN FileDocumento7 pagineDCN Filekarieshma sharrmaNessuna valutazione finora