Potrebbero piacerti anche
- Lec 1Documento20 pagineLec 1hamodeh breikNessuna valutazione finora
- Lec 38Documento29 pagineLec 38deciohNessuna valutazione finora
- Lec 12Documento10 pagineLec 12Rupesh TiwariNessuna valutazione finora
- Lec20 PDFDocumento12 pagineLec20 PDFRaviNessuna valutazione finora
- PdfjoinerDocumento1.872 paginePdfjoinerSidharthNessuna valutazione finora
- High Voltage DC Transmission Prof. S.N. Singh Department of Electrical Engineering Indian Institute of Technology, KanpurDocumento26 pagineHigh Voltage DC Transmission Prof. S.N. Singh Department of Electrical Engineering Indian Institute of Technology, KanpurAjin CRNessuna valutazione finora
- Lec10 Manufacturing ProcessDocumento23 pagineLec10 Manufacturing ProcessSreejith MenonNessuna valutazione finora
- Lec2 PDFDocumento8 pagineLec2 PDFAmal GSNessuna valutazione finora
- Forced Harmonic VibrationsDocumento31 pagineForced Harmonic VibrationsVigil J VijayanNessuna valutazione finora
- 2 Lec2Documento25 pagine2 Lec2Armando FaríasNessuna valutazione finora
- First Law of Thermodynamics For Open Systems or Flow ProcessDocumento32 pagineFirst Law of Thermodynamics For Open Systems or Flow ProcessGurunath AeroNessuna valutazione finora
- Principles of Mechanical Measurements Prof. R. Raman Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture No. # 03Documento14 paginePrinciples of Mechanical Measurements Prof. R. Raman Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture No. # 03AbhilashKumarBNessuna valutazione finora
- Inverse Power MethodDocumento16 pagineInverse Power MethodDarsHan MoHanNessuna valutazione finora
- Lec 17Documento20 pagineLec 17Nikhil NaikNessuna valutazione finora
- Lec 1Documento18 pagineLec 1Amrut RajkarneNessuna valutazione finora
- Lec 19Documento11 pagineLec 19RUCHIRA KUMAR PRADHANNessuna valutazione finora
- Lec 18Documento22 pagineLec 18Bekele GaddisaNessuna valutazione finora
- Lec 26Documento30 pagineLec 26Abdul Hani MohammedNessuna valutazione finora
- Harmonic Oscillator III: Forced OscillationsDocumento12 pagineHarmonic Oscillator III: Forced Oscillationspusa123Nessuna valutazione finora
- Ns - Free - Undamped/vibrations - Free - Undamped - HTM: Free Vibration of Conservative, Single Degree of Freedom, Linear SystemsDocumento20 pagineNs - Free - Undamped/vibrations - Free - Undamped - HTM: Free Vibration of Conservative, Single Degree of Freedom, Linear SystemsLeo KutsNessuna valutazione finora
- Lec 10Documento13 pagineLec 10Harita B6H1Nessuna valutazione finora
- Governors Part 2Documento11 pagineGovernors Part 2Subash RajeshNessuna valutazione finora
- Mass Transfer II Prof. Nishith Verma Department of Chemical Engineering Indian Institute of Technology, Kanpur Module No. # 01 Lecture No. # 40Documento29 pagineMass Transfer II Prof. Nishith Verma Department of Chemical Engineering Indian Institute of Technology, Kanpur Module No. # 01 Lecture No. # 40prthrNessuna valutazione finora
- Lec 39Documento21 pagineLec 39arshia tabassumNessuna valutazione finora
- Free Damped VibrationsDocumento7 pagineFree Damped VibrationsYob YnnosNessuna valutazione finora
- Lec 9Documento19 pagineLec 9Adeoti OladapoNessuna valutazione finora
- Lec12 PDFDocumento41 pagineLec12 PDFVicky SinghNessuna valutazione finora
- Lec1 PDFDocumento18 pagineLec1 PDFKrunalbhai ThakarNessuna valutazione finora
- Lec4 PDFDocumento15 pagineLec4 PDFbsnl007Nessuna valutazione finora
- Lec 5Documento15 pagineLec 5Fernando Paez MendizabalNessuna valutazione finora
- Revision: Previous Lecture Was About Harmonic OscillatorDocumento17 pagineRevision: Previous Lecture Was About Harmonic OscillatorediealiNessuna valutazione finora
- Woofer SpeedDocumento6 pagineWoofer SpeedRo HenNessuna valutazione finora
- Lec 37Documento20 pagineLec 37varun095328Nessuna valutazione finora
- NaxyeryucDocumento29 pagineNaxyeryucsivasu1980aNessuna valutazione finora
- Lec 34Documento23 pagineLec 34lvb123Nessuna valutazione finora
- Today We Start With Introduction To State Space in This We Will Cover Why There Is Need For State Space Representation. (Refer Slide Time: 00:34)Documento11 pagineToday We Start With Introduction To State Space in This We Will Cover Why There Is Need For State Space Representation. (Refer Slide Time: 00:34)GASHU MESFINNessuna valutazione finora
- Lec3 PDFDocumento20 pagineLec3 PDFdeciohNessuna valutazione finora
- Equal Area Criterion Power System DynamicsDocumento28 pagineEqual Area Criterion Power System Dynamicsபிரசன்னகுமார் ஆனந்தன்Nessuna valutazione finora
- Lec 33Documento16 pagineLec 33Tesh SiNessuna valutazione finora
- Dynamics of Machines Prof. Amitabha Ghosh Department of Mechanical Engineering Indian Institute of Technology, KanpurDocumento17 pagineDynamics of Machines Prof. Amitabha Ghosh Department of Mechanical Engineering Indian Institute of Technology, KanpurNeelesh KumarNessuna valutazione finora
- Vib Bas ExcitationDocumento11 pagineVib Bas ExcitationHassanImranNessuna valutazione finora
- Lec 7Documento16 pagineLec 7Adeoti OladapoNessuna valutazione finora
- Dynamics of Physical Systems - Lec01Documento24 pagineDynamics of Physical Systems - Lec01rdsrajNessuna valutazione finora
- Lec 50Documento17 pagineLec 50Ankan BhuniaNessuna valutazione finora
- Lec 17Documento12 pagineLec 17RUCHIRA KUMAR PRADHANNessuna valutazione finora
- Magnification Factor and Frequency Response CurveDocumento8 pagineMagnification Factor and Frequency Response CurveAdeoti OladapoNessuna valutazione finora
- Subsynchronous OscillationDocumento31 pagineSubsynchronous OscillationjyothirNessuna valutazione finora
- MITOCW - MITRES - 6-007s11lec26 - 300k.mp4: ProfessorDocumento12 pagineMITOCW - MITRES - 6-007s11lec26 - 300k.mp4: Professoruser2127Nessuna valutazione finora
- Principles of Physical Metallurgy Prof. R. N. Ghosh Department of Metallurgical and Materials Engineering Indian Institute of Technology, KharagpurDocumento28 paginePrinciples of Physical Metallurgy Prof. R. N. Ghosh Department of Metallurgical and Materials Engineering Indian Institute of Technology, KharagpurAkshay MishraNessuna valutazione finora
- Harmonic Oscillator II: Damped OscillatorDocumento12 pagineHarmonic Oscillator II: Damped Oscillatorpusa123Nessuna valutazione finora
- Lec 4Documento29 pagineLec 4Bekele GaddisaNessuna valutazione finora
- Lec14 PDFDocumento29 pagineLec14 PDFCarlos Arturo GarcíaNessuna valutazione finora
- Pauls Online Notes - Differential Equations - Mechanical VibrationsDocumento15 paginePauls Online Notes - Differential Equations - Mechanical VibrationsRicardo ColosimoNessuna valutazione finora
- Lec 39Documento27 pagineLec 39varun095328Nessuna valutazione finora
- Power System Analysis Prof. A.K. Sinha Department of Electrical Engineering Indian Institute of Technology, Kharagpur Lecture - 15 Load ModelDocumento27 paginePower System Analysis Prof. A.K. Sinha Department of Electrical Engineering Indian Institute of Technology, Kharagpur Lecture - 15 Load ModeljameelahmadNessuna valutazione finora
- Experimental Modal AnalysisDocumento11 pagineExperimental Modal Analysisrs0004Nessuna valutazione finora
- MITOCW - MITRES2 - 002s10nonlinear - Lec02 - 300k-mp4: ProfessorDocumento22 pagineMITOCW - MITRES2 - 002s10nonlinear - Lec02 - 300k-mp4: ProfessorAhmed EwisNessuna valutazione finora
- Lec 15Documento17 pagineLec 15Adeoti OladapoNessuna valutazione finora
- Lec 33Documento30 pagineLec 33azitaggNessuna valutazione finora
- Effect of Z Tolerance and - Z Variation On Short CircuitDocumento3 pagineEffect of Z Tolerance and - Z Variation On Short CircuitEngr Fahimuddin QureshiNessuna valutazione finora
- Flux Imbalances in Push Pull ConverterDocumento5 pagineFlux Imbalances in Push Pull ConverterEngr Fahimuddin QureshiNessuna valutazione finora
- Time Synchronization of Relays at NTDC Grid Stations-1Documento1 paginaTime Synchronization of Relays at NTDC Grid Stations-1Engr Fahimuddin QureshiNessuna valutazione finora
- Push - Pull Converter - 4 - Wavforms - Voltage - StressDocumento18 paginePush - Pull Converter - 4 - Wavforms - Voltage - StressEngr Fahimuddin QureshiNessuna valutazione finora
- Distance Protection (Zone 2 Consideration)Documento1 paginaDistance Protection (Zone 2 Consideration)Engr Fahimuddin QureshiNessuna valutazione finora
- Push - Pull Converter - 5 - B - H - Cruve - Transformer - Design - UpdatedDocumento24 paginePush - Pull Converter - 5 - B - H - Cruve - Transformer - Design - UpdatedEngr Fahimuddin QureshiNessuna valutazione finora
- Diagnostics of Winding Deformation in A Single-PhaDocumento4 pagineDiagnostics of Winding Deformation in A Single-PhaEngr Fahimuddin QureshiNessuna valutazione finora
- HVDC Links in System OperationsDocumento81 pagineHVDC Links in System OperationsUtopia BogdanNessuna valutazione finora
- Interpretation of Gases Generated in Mineral OilDocumento32 pagineInterpretation of Gases Generated in Mineral OilEngr Fahimuddin QureshiNessuna valutazione finora
- Conference 101719Documento3 pagineConference 101719Engr Fahimuddin QureshiNessuna valutazione finora
- CT Sizing - CT Over Dimensioning FactorDocumento19 pagineCT Sizing - CT Over Dimensioning FactorEngr Fahimuddin QureshiNessuna valutazione finora
- Case StudyDocumento8 pagineCase StudyEngr Fahimuddin QureshiNessuna valutazione finora
- Homework 5Documento4 pagineHomework 5Engr Fahimuddin QureshiNessuna valutazione finora
- OSHA Safety ManualDocumento278 pagineOSHA Safety ManualEngr Fahimuddin QureshiNessuna valutazione finora
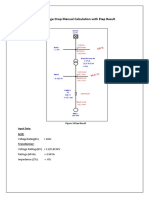
- Cable Voltage Drop CalculationDocumento3 pagineCable Voltage Drop CalculationEngr Fahimuddin QureshiNessuna valutazione finora
- Investigation of A Transferred Voltage Surge Trbusic 19IPST033Documento5 pagineInvestigation of A Transferred Voltage Surge Trbusic 19IPST033Engr Fahimuddin QureshiNessuna valutazione finora
- Mho Relay 2 PDFDocumento8 pagineMho Relay 2 PDFArion BaboolalNessuna valutazione finora
- Article Download 1Documento6 pagineArticle Download 1Engr Fahimuddin QureshiNessuna valutazione finora
- AuthorproofspringerDocumento19 pagineAuthorproofspringerEngr Fahimuddin QureshiNessuna valutazione finora
- Performance Analysis of Distance Relay On Shunt - Series Facts-CompDocumento106 paginePerformance Analysis of Distance Relay On Shunt - Series Facts-CompEngr Fahimuddin QureshiNessuna valutazione finora
- Short Circuit Study 11Documento5 pagineShort Circuit Study 11Engr Fahimuddin QureshiNessuna valutazione finora
- Csa - Cia - MalikDocumento26 pagineCsa - Cia - MalikEngr Fahimuddin QureshiNessuna valutazione finora
- What To Do If Your Team Is Underperforming ABP Fahimuddin QureshiDocumento41 pagineWhat To Do If Your Team Is Underperforming ABP Fahimuddin QureshiEngr Fahimuddin QureshiNessuna valutazione finora
- 2018 04 16 Tertiary Winding in Transformers PRCDocumento17 pagine2018 04 16 Tertiary Winding in Transformers PRCSaurav Kafle100% (1)
- Short Circuit Study 11Documento5 pagineShort Circuit Study 11Engr Fahimuddin QureshiNessuna valutazione finora
- CSA Report Fahim FinalDocumento9 pagineCSA Report Fahim FinalEngr Fahimuddin QureshiNessuna valutazione finora
- Article Base Presentation Final 1Documento26 pagineArticle Base Presentation Final 1Engr Fahimuddin QureshiNessuna valutazione finora
- Ex 12 HLOOKUPDocumento2 pagineEx 12 HLOOKUPEngr Fahimuddin QureshiNessuna valutazione finora
- Cable Schedule For Low Impedance Bus Bar Protection PanelDocumento4 pagineCable Schedule For Low Impedance Bus Bar Protection PanelEngr Fahimuddin QureshiNessuna valutazione finora
- Who Is Telling The Truth FinalDocumento41 pagineWho Is Telling The Truth FinalEngr Fahimuddin Qureshi100% (1)
- Pitch Analysis PaperDocumento7 paginePitch Analysis PaperMunib MunirNessuna valutazione finora
- PienaDocumento1 paginaPienaMika Flores PedroNessuna valutazione finora
- INS2015 Fundamentals of Finance HungCV 1Documento3 pagineINS2015 Fundamentals of Finance HungCV 1Phương Anh NguyễnNessuna valutazione finora
- Haberman Data Logistic Regression AnalysisDocumento5 pagineHaberman Data Logistic Regression AnalysisEvelynNessuna valutazione finora
- Wearable BiosensorsDocumento16 pagineWearable BiosensorsShreehari Haridasan100% (1)
- Chapter4 RetainingwallDocumento55 pagineChapter4 RetainingwallNur HazwaniNessuna valutazione finora
- Ultraviolet Flame Detector: Omniguard Model 660Documento2 pagineUltraviolet Flame Detector: Omniguard Model 660carlosNessuna valutazione finora
- Accommodating Expansion of Brickwork: Technical Notes 18ADocumento13 pagineAccommodating Expansion of Brickwork: Technical Notes 18AWissam AlameddineNessuna valutazione finora
- Literature Review On Parking SpaceDocumento6 pagineLiterature Review On Parking Spacefvgy6fn3100% (1)
- Template 3 - MATH 3-REGULAR-DIAGNOSTICDocumento2 pagineTemplate 3 - MATH 3-REGULAR-DIAGNOSTIClailanie CervantesNessuna valutazione finora
- (AB-ANI) Program SpecificationDocumento8 pagine(AB-ANI) Program SpecificationMycah EvangelistaNessuna valutazione finora
- Python - Data EngineeringDocumento34 paginePython - Data EngineeringChetan PatilNessuna valutazione finora
- Himachal Pradesh Staff Selection Commission Hamirpur - 177001Documento2 pagineHimachal Pradesh Staff Selection Commission Hamirpur - 177001Verma JagdeepNessuna valutazione finora
- Staad 4Documento37 pagineStaad 4saisssms9116100% (2)
- Cable Systems For High and Extra-High Voltage: Development, Manufacture, Testing, Installation and Operation of Cables and Their AccessoriesDocumento1 paginaCable Systems For High and Extra-High Voltage: Development, Manufacture, Testing, Installation and Operation of Cables and Their AccessorieseddisonfhNessuna valutazione finora
- KV Class 3 Half Yearly Previous Year Question Paper 2019 ComputerDocumento2 pagineKV Class 3 Half Yearly Previous Year Question Paper 2019 Computer02 Aanya Gupta VII CNessuna valutazione finora
- Om en A: F in Ite D Iffe Ren Ce-B Ase DN Um Eri Ca L M Eth Od SDocumento426 pagineOm en A: F in Ite D Iffe Ren Ce-B Ase DN Um Eri Ca L M Eth Od SPrateek Kumar PandeyNessuna valutazione finora
- EED516-Assignment 1 - S1 2023Documento2 pagineEED516-Assignment 1 - S1 2023RETRO GAMERSNessuna valutazione finora
- BFISDocumento1 paginaBFISEverestNessuna valutazione finora
- A Brief Tutorial On Studio MonitorsDocumento18 pagineA Brief Tutorial On Studio MonitorsCurtis O'BrienNessuna valutazione finora
- MiningDocumento3 pagineMiningDherick RaleighNessuna valutazione finora
- Dimensions and Methodology of Business Studies Dec 2018Documento2 pagineDimensions and Methodology of Business Studies Dec 2018Nallavenaaya Unni100% (1)
- Inglês - Degrees of ComparisonDocumento4 pagineInglês - Degrees of ComparisonVersehgi IINessuna valutazione finora
- Application Bright Ideas Education Grant Program For TeachersDocumento6 pagineApplication Bright Ideas Education Grant Program For Teachersapi-320983699Nessuna valutazione finora
- Concession Project List Excel 02-Aug-2019Documento15 pagineConcession Project List Excel 02-Aug-2019Vishal BansalNessuna valutazione finora
- Interjections NotesDocumento2 pagineInterjections NotesKanna ImuiNessuna valutazione finora
- List of Tyre Pyrolysis Oil Companies in IndiaDocumento2 pagineList of Tyre Pyrolysis Oil Companies in IndiaHaneesh ReddyNessuna valutazione finora
- Theories of PersonalityDocumento4 pagineTheories of PersonalityKeshav JhaNessuna valutazione finora
- Cusps: Ramesh 04-Jun-1976 12:30:00 PM Krishnagiri 78:14:0 E, 12:32:0 N Tzone: 5.5 KP (Original) Ayanamsha 23:26:2Documento1 paginaCusps: Ramesh 04-Jun-1976 12:30:00 PM Krishnagiri 78:14:0 E, 12:32:0 N Tzone: 5.5 KP (Original) Ayanamsha 23:26:2Suresh NatarajanNessuna valutazione finora
- ResumeDocumento3 pagineResumeSaharsh MaheshwariNessuna valutazione finora