Potrebbero piacerti anche
- Implementation of Space Vector Pulse Width Modulation Technique On Three Phase Two Level InverterDocumento11 pagineImplementation of Space Vector Pulse Width Modulation Technique On Three Phase Two Level InverterАлексей ЯмаNessuna valutazione finora
- Harmonic DistortionsDocumento23 pagineHarmonic Distortionssandeep kumar mishraNessuna valutazione finora
- Uow - Power Electronics 3 - 2020Documento14 pagineUow - Power Electronics 3 - 2020FUCKYOUNessuna valutazione finora
- Space Vector PWM and TransformationDocumento47 pagineSpace Vector PWM and TransformationB LAKSHMI PRIYA 180992Nessuna valutazione finora
- Experiment - 2 Synchro Transmitter ReceiverDocumento10 pagineExperiment - 2 Synchro Transmitter Receivershivamsinghunique1Nessuna valutazione finora
- SpaceVector PWM InverteDocumento27 pagineSpaceVector PWM InverteShoaib KhizerNessuna valutazione finora
- 2 LVL PDFDocumento7 pagine2 LVL PDFakun gamingjNessuna valutazione finora
- SpaceVector PWM InverterDocumento35 pagineSpaceVector PWM Invertersolomong50% (2)
- Chapter 3 - Part 2 - YusDocumento25 pagineChapter 3 - Part 2 - YusWeehao SiowNessuna valutazione finora
- 70.1 02 PDFDocumento14 pagine70.1 02 PDFyounesNessuna valutazione finora
- Space Vector Control of A Three-Phase Rectifier Using PLECSDocumento5 pagineSpace Vector Control of A Three-Phase Rectifier Using PLECSNguyễn Đình VănNessuna valutazione finora
- Space-Vector PWM With TMS320C24x/F24x Using Hardware and Software Determined Switching PatternsDocumento44 pagineSpace-Vector PWM With TMS320C24x/F24x Using Hardware and Software Determined Switching PatternsMadusanka WeebeddaNessuna valutazione finora
- Dynamic Model of Induction Machine-1Documento68 pagineDynamic Model of Induction Machine-1Sanskruti TakalkhedeNessuna valutazione finora
- Example 4 1 Circuits IntroductionDocumento4 pagineExample 4 1 Circuits IntroductionDiego Escobar MoncadaNessuna valutazione finora
- Comparative Study of Five Level and SeveDocumento12 pagineComparative Study of Five Level and Sevemahmoud yarahmadiNessuna valutazione finora
- A. Lightning Current and ImpedanceDocumento15 pagineA. Lightning Current and ImpedanceJosNessuna valutazione finora
- Real Time Implementation of Space Vector Pulse Width Modulation Using Arduino DUE BoardDocumento6 pagineReal Time Implementation of Space Vector Pulse Width Modulation Using Arduino DUE BoardDaniel PinedaNessuna valutazione finora
- Sample Questions From EC3032 Power Electronics 2020 Online ExamDocumento5 pagineSample Questions From EC3032 Power Electronics 2020 Online Examsadeepa sooriyaarachchiNessuna valutazione finora
- Multilvel Inverter ControlDocumento125 pagineMultilvel Inverter ControlVenkata Ramdas BonamNessuna valutazione finora
- Power Angle CharacteristicsDocumento6 paginePower Angle Characteristicsmadhan_22Nessuna valutazione finora
- للDocumento4 pagineللerfan roshandelNessuna valutazione finora
- Unit - Ii Stepping MotorDocumento56 pagineUnit - Ii Stepping MotorLaxmikant BagaleNessuna valutazione finora
- Space Vector Modulated Three Phase Voltage Source InverterDocumento24 pagineSpace Vector Modulated Three Phase Voltage Source InverterАлексей ЯмаNessuna valutazione finora
- Electrical Machines IIDocumento6 pagineElectrical Machines IIsuryaprakash001Nessuna valutazione finora
- U20ee615 Sem NotesDocumento144 pagineU20ee615 Sem NotesarunajithNessuna valutazione finora
- 2007 - Performance Characteristics of The Reduced Common Mode Voltage Near State PWM MethodDocumento10 pagine2007 - Performance Characteristics of The Reduced Common Mode Voltage Near State PWM MethodNguyễn Nhật TưởngNessuna valutazione finora
- Three Phase DC To Ac InverterDocumento44 pagineThree Phase DC To Ac Inverternoor deen100% (1)
- 11 Chapter3Documento46 pagine11 Chapter3Anonymous wAdxNydjNessuna valutazione finora
- Buku DiodaDocumento8 pagineBuku Diodanaru_chan1003Nessuna valutazione finora
- A Novel Space Vector Modulation (SVM) Controlled Inverter For Adjustable Speed Drive ApplicationsDocumento9 pagineA Novel Space Vector Modulation (SVM) Controlled Inverter For Adjustable Speed Drive ApplicationsInternational Journal of Engineering Inventions (IJEI)Nessuna valutazione finora
- Three Phase InverterrsDocumento21 pagineThree Phase InverterrsZack ZoldyckNessuna valutazione finora
- Phasor Diagram Verification - 3 Wire System: Safety PrecautionsDocumento7 paginePhasor Diagram Verification - 3 Wire System: Safety PrecautionsmohyousifNessuna valutazione finora
- Unit IIDocumento38 pagineUnit IIMugilNessuna valutazione finora
- BLDC Motor Control Using A Variable DC Link SixDocumento8 pagineBLDC Motor Control Using A Variable DC Link Sixsashank rawatNessuna valutazione finora
- B 31290735Documento75 pagineB 31290735chibssa alemayehuNessuna valutazione finora
- Multiphase A.C. Emfs (Produced by Multiple Windings)Documento6 pagineMultiphase A.C. Emfs (Produced by Multiple Windings)rakeshee2007Nessuna valutazione finora
- Multiphase A.C. Emfs (Produced by Multiple Windings)Documento6 pagineMultiphase A.C. Emfs (Produced by Multiple Windings)rakeshee2007Nessuna valutazione finora
- Multiphase A.C. Emfs (Produced by Multiple Windings)Documento6 pagineMultiphase A.C. Emfs (Produced by Multiple Windings)deepak_gupta_pritiNessuna valutazione finora
- Three Phase Circuits 3Documento31 pagineThree Phase Circuits 3mivriNessuna valutazione finora
- Lecture 22 18102022Documento14 pagineLecture 22 18102022Nitish PutrevuNessuna valutazione finora
- Space Vector PWMDocumento10 pagineSpace Vector PWMMohamed Nabil100% (1)
- Digital Implementation of Space Vector Pulse Width Modulation Technique Using 8-Bit MicrocontrollerDocumento8 pagineDigital Implementation of Space Vector Pulse Width Modulation Technique Using 8-Bit MicrocontrollerahmedNessuna valutazione finora
- ES4E8 Lab2 22 23Documento12 pagineES4E8 Lab2 22 23金子泰Nessuna valutazione finora
- Space Vector ControlDocumento21 pagineSpace Vector ControlPoras KhetarpalNessuna valutazione finora
- A Review of Negative Sequence CurrentDocumento19 pagineA Review of Negative Sequence CurrentovercurrentNessuna valutazione finora
- Three Phase Bridge Inverter Explained - Electrical ConceptsDocumento9 pagineThree Phase Bridge Inverter Explained - Electrical ConceptsMohammad HamamdNessuna valutazione finora
- A Comparison of Various DCDC Converters and Their Application ToDocumento8 pagineA Comparison of Various DCDC Converters and Their Application ToRajan M SNessuna valutazione finora
- ABC DQ TransformationDocumento2 pagineABC DQ TransformationRoop Kapur0% (1)
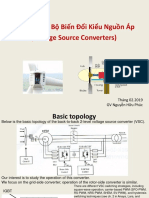
- 07 - VSC - Voltage Source ConverterDocumento51 pagine07 - VSC - Voltage Source ConverterHùng Võ MạnhNessuna valutazione finora
- Rotary Encoder (Incremental) E6A2: Ordering InformationDocumento8 pagineRotary Encoder (Incremental) E6A2: Ordering InformationDariusNessuna valutazione finora
- Digital Measurement of Electrical Quantities Cathode Ray OscilloscopeDocumento65 pagineDigital Measurement of Electrical Quantities Cathode Ray OscilloscopekrishnandrkNessuna valutazione finora
- What Is An Inverter?: Classification of InvertersDocumento11 pagineWhat Is An Inverter?: Classification of Invertersayash mohantyNessuna valutazione finora
- Matlab/S M F O C PMSM D S V: Imulink Odel of Ield Riented Ontrol of Rive Using Pace EctorsDocumento10 pagineMatlab/S M F O C PMSM D S V: Imulink Odel of Ield Riented Ontrol of Rive Using Pace Ectorshusham hushamNessuna valutazione finora
- A Hybrid PWM Strategy Combining Modified Space Vector and Triangle Comparison Methods - Vladimir Blasko PDFDocumento7 pagineA Hybrid PWM Strategy Combining Modified Space Vector and Triangle Comparison Methods - Vladimir Blasko PDFStefania OliveiraNessuna valutazione finora
- Space Vector Modulation of A 3-Phase AC Induction Motor With The Z16FMC ZNEO MicrocontrollerDocumento28 pagineSpace Vector Modulation of A 3-Phase AC Induction Motor With The Z16FMC ZNEO Microcontrollerturbo385Nessuna valutazione finora
- Electric - Drive Chap4 Part2Documento22 pagineElectric - Drive Chap4 Part2Alazar GetachewNessuna valutazione finora
- Electrical and Electronic Principles 3 Checkbook: The Checkbook SeriesDa EverandElectrical and Electronic Principles 3 Checkbook: The Checkbook SeriesNessuna valutazione finora
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkDa EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNessuna valutazione finora
- NTA Based JEE Main Practice Question Bank PHYSICSDocumento476 pagineNTA Based JEE Main Practice Question Bank PHYSICStwin mastersNessuna valutazione finora
- SET Motion in A: CircleDocumento11 pagineSET Motion in A: Circle臧华运Nessuna valutazione finora
- Analysis 2 IDocumento15 pagineAnalysis 2 IMiliyon TilahunNessuna valutazione finora
- Sistem PuliDocumento31 pagineSistem Pulimega rahayuNessuna valutazione finora
- Test Papers 176476Documento29 pagineTest Papers 176476Gaurav SarkarNessuna valutazione finora
- Soalan Kbat Add Math Form 5Documento8 pagineSoalan Kbat Add Math Form 5Eric Mooi50% (2)
- Access Answers of Science NCERT Class 9 Chapter 9: Force and Laws of Motion (All Intext and Exercise Questions Solved)Documento3 pagineAccess Answers of Science NCERT Class 9 Chapter 9: Force and Laws of Motion (All Intext and Exercise Questions Solved)VijayNessuna valutazione finora
- Chapter 21 Sound Wave REVISIONDocumento4 pagineChapter 21 Sound Wave REVISIONYilea1111111Nessuna valutazione finora
- Cdna02187enc 001Documento56 pagineCdna02187enc 001Michael BenhamouNessuna valutazione finora
- PHYS 1220 Coulomb's Law and Electric Fields SolutionsDocumento20 paginePHYS 1220 Coulomb's Law and Electric Fields SolutionsHüthâifâ AbdérahmânNessuna valutazione finora
- Some Friedel-Crafts Reactions of Y-ButyrolactoneDocumento6 pagineSome Friedel-Crafts Reactions of Y-ButyrolactonedntwntNessuna valutazione finora
- Jeemainonline2019 PDFDocumento257 pagineJeemainonline2019 PDFHarshit KhareNessuna valutazione finora
- Channel Lining and Pier Scour Design ManualDocumento53 pagineChannel Lining and Pier Scour Design ManualAdeRatihIspandiariNessuna valutazione finora
- 4th Preliminary Exam in Science 9Documento4 pagine4th Preliminary Exam in Science 9Loreyn LoridoNessuna valutazione finora
- 1950 - Colthup - J Opt Soc Am - Spectra-Structure Correlations in The Infra-Red RegionDocumento4 pagine1950 - Colthup - J Opt Soc Am - Spectra-Structure Correlations in The Infra-Red Regionvitoribeiro90Nessuna valutazione finora
- Cs SsDocumento15 pagineCs SsYuniaYayukNessuna valutazione finora
- Electromagnetism N: Alan MurrayDocumento23 pagineElectromagnetism N: Alan MurrayCocis PeTrisorNessuna valutazione finora
- Brassylic Acid PVCDocumento4 pagineBrassylic Acid PVCSudha Raman-ShadakshariNessuna valutazione finora
- What Nuclear Physics Is All About - ICT-WikiDocumento5 pagineWhat Nuclear Physics Is All About - ICT-WikiSaisamckNessuna valutazione finora
- Fluid Flow Operation - 130502Documento2 pagineFluid Flow Operation - 130502sanjayNessuna valutazione finora
- The Plane Stress ProblemDocumento14 pagineThe Plane Stress ProblemSaif RahmanNessuna valutazione finora
- Assignment On LASER (PH:102) : All The Problems Are From "Optics - Ajoy Ghatak"Documento2 pagineAssignment On LASER (PH:102) : All The Problems Are From "Optics - Ajoy Ghatak"nickky_agrawal52Nessuna valutazione finora
- Generator ExcitationDocumento68 pagineGenerator ExcitationRavish Singh89% (9)
- + 2 Chemistry 1 Mark Repeated Qs EM Upto Sept - 2016Documento38 pagine+ 2 Chemistry 1 Mark Repeated Qs EM Upto Sept - 2016Raison ThomasNessuna valutazione finora
- Electric Charges and Fields WS2Documento3 pagineElectric Charges and Fields WS2Ananthakrishnan Tinneveli VNessuna valutazione finora
- Chapter 1 Functions of Several VariablesDocumento78 pagineChapter 1 Functions of Several VariablesChhaviNessuna valutazione finora
- Transport Phenomena in Biological Systems, Second Edition: George A. Truskey, Fan Yuan, and David F. KatzDocumento28 pagineTransport Phenomena in Biological Systems, Second Edition: George A. Truskey, Fan Yuan, and David F. KatzValaMelkorNessuna valutazione finora
- MTD 12 3Documento2 pagineMTD 12 3arifi_civilNessuna valutazione finora
- Chemistry of Transition MetalsDocumento44 pagineChemistry of Transition MetalsAqilah MahabirNessuna valutazione finora
- Lab Report 5Documento19 pagineLab Report 5Cherif ChokeirNessuna valutazione finora