Potrebbero piacerti anche
- Resumen de Algebra Lineal PDFDocumento41 pagineResumen de Algebra Lineal PDFMario MostroNessuna valutazione finora
- Ejercicios Resueltos de ShaumDocumento9 pagineEjercicios Resueltos de ShaumJorge Luis LópezNessuna valutazione finora
- Funciones Reales de Variable VectorialDocumento8 pagineFunciones Reales de Variable VectorialGeylli FernandezNessuna valutazione finora
- Ejercicios Propuestos3d Desarrollados en AUTOCADDocumento15 pagineEjercicios Propuestos3d Desarrollados en AUTOCADJorge Luis LópezNessuna valutazione finora
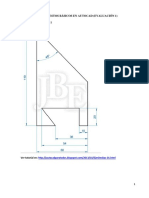
- Ejercicios Propuestos Básicos en AUTOCADDocumento11 pagineEjercicios Propuestos Básicos en AUTOCADJorge Luis LópezNessuna valutazione finora
- Ecuaciones DiferencialesDocumento13 pagineEcuaciones DiferencialesJorge Luis LópezNessuna valutazione finora
- Árbol de ProblemasDocumento1 paginaÁrbol de ProblemasJorge Luis LópezNessuna valutazione finora
- Libro de Ejercicio Trigonom ADocumento15 pagineLibro de Ejercicio Trigonom AJorge Luis LópezNessuna valutazione finora
- TEMA03 - Termoplasticos y TermoestablesDocumento65 pagineTEMA03 - Termoplasticos y TermoestablesJorge Luis LópezNessuna valutazione finora
- Ejercicios Texto CientíficoDocumento2 pagineEjercicios Texto CientíficoJorge Luis López88% (8)
- La Minería y Sus Residuos TóxicosDocumento2 pagineLa Minería y Sus Residuos TóxicosJorge Luis LópezNessuna valutazione finora
- Fuersas Armadas y Policia NacionalDocumento12 pagineFuersas Armadas y Policia NacionalJorge Luis LópezNessuna valutazione finora
- Árbol de Problemas Aeropuerto DesperdicioDocumento1 paginaÁrbol de Problemas Aeropuerto DesperdicioJorge Luis LópezNessuna valutazione finora
- Lengua Aprendizaje SignificativoDocumento4 pagineLengua Aprendizaje SignificativoJorge Luis LópezNessuna valutazione finora
- Intavenoso FDocumento9 pagineIntavenoso FJorge Luis LópezNessuna valutazione finora
- Corregido Uta Proyecto Integrador de Saberes Formato FISEI FINAL 2Documento44 pagineCorregido Uta Proyecto Integrador de Saberes Formato FISEI FINAL 2Jorge Luis LópezNessuna valutazione finora
- de Práctica Semana 01Documento17 paginede Práctica Semana 01Vargas.Nessuna valutazione finora
- FG1 Práctica 02 VectoresDocumento10 pagineFG1 Práctica 02 VectoresDenis Monge MolinaNessuna valutazione finora
- Diapositivas - Metodos para El Calculo de Valores y Vectores Propios y Gradiante, Divergencia y Rotacion-Rodriguez GleyserDocumento21 pagineDiapositivas - Metodos para El Calculo de Valores y Vectores Propios y Gradiante, Divergencia y Rotacion-Rodriguez Gleyseryetter moralesNessuna valutazione finora
- Trabajo2 MN RafaelPadillaDocumento21 pagineTrabajo2 MN RafaelPadillaRafael PadillaNessuna valutazione finora
- AL Is Actividad S4Documento7 pagineAL Is Actividad S4JHON FRANCISCO LOPEZNessuna valutazione finora
- Integración Por Cambio de VariableDocumento6 pagineIntegración Por Cambio de VariableVega Martinez KevinNessuna valutazione finora
- Lab Fisica 1 Riel de AireDocumento7 pagineLab Fisica 1 Riel de AireRODRIGUEZ CRUZ ANDREANessuna valutazione finora
- Matrices: Trabajo Práctico #3Documento6 pagineMatrices: Trabajo Práctico #3Ornella Salinas (8824)Nessuna valutazione finora
- Proyección Ortogonal, Ángulo Entre VectoresDocumento9 pagineProyección Ortogonal, Ángulo Entre Vectoresalex :vNessuna valutazione finora
- MATRICESDocumento7 pagineMATRICESEsther GonzalesNessuna valutazione finora
- Aplicaciones en FisicaDocumento8 pagineAplicaciones en FisicaAlvaro RoblesNessuna valutazione finora
- 1.4 Forma Polar y Exponencial de Un Numero ComplejoDocumento6 pagine1.4 Forma Polar y Exponencial de Un Numero ComplejoMaya PeruciniNessuna valutazione finora
- Física 01 CNDocumento4 pagineFísica 01 CNJose Pérez PalominoNessuna valutazione finora
- Autovalores y AutovectoresDocumento3 pagineAutovalores y AutovectoresCarlos EscobarNessuna valutazione finora
- Sistema de Ecuaciones LinealDocumento2 pagineSistema de Ecuaciones LinealAlejandro FernandezNessuna valutazione finora
- Algebra LinealDocumento15 pagineAlgebra LinealJorge Portugal ZvNessuna valutazione finora
- Taller02 Alineal semII 22Documento2 pagineTaller02 Alineal semII 22ISABELLA ARMENDARIZ MIRANDANessuna valutazione finora
- 1394 - 1021512614 - Daniel CastroDocumento17 pagine1394 - 1021512614 - Daniel CastroThe Big BossNessuna valutazione finora
- Luis Rivero MatematicaDocumento6 pagineLuis Rivero MatematicahaylethNessuna valutazione finora
- Organigrama VectoresDocumento1 paginaOrganigrama VectoresFlavio QuirozNessuna valutazione finora
- Clase 2 Cap4AVDocumento9 pagineClase 2 Cap4AVJeidi QuinteroNessuna valutazione finora
- Matrices y Determinantes - Geometria AnaliticaDocumento12 pagineMatrices y Determinantes - Geometria AnaliticaAlvaro Reducindo AlvarezNessuna valutazione finora
- Álegra Lineal Taller ResueltoDocumento4 pagineÁlegra Lineal Taller ResueltosebastianNessuna valutazione finora
- Examen Escrito-Gaa MecatronicaDocumento2 pagineExamen Escrito-Gaa Mecatronicacristhian aaron vigo villarNessuna valutazione finora
- Apunte Rectas en R2Documento7 pagineApunte Rectas en R2Alex TevezNessuna valutazione finora
- 01 - Transforcaciones LinealesDocumento6 pagine01 - Transforcaciones LinealesMiguel SánchezNessuna valutazione finora
- Exposicion AlgebraDocumento25 pagineExposicion AlgebrajoseNessuna valutazione finora
- PP3 BAIN075+pauta 20202Documento9 paginePP3 BAIN075+pauta 20202Gabriel IgnacioNessuna valutazione finora