Potrebbero piacerti anche
- Manual de Operacao Digi 3 Truck CenterDocumento39 pagineManual de Operacao Digi 3 Truck Centeralcimar de limaNessuna valutazione finora
- Mop Digipratic Rev03-2 EletronicoDocumento37 pagineMop Digipratic Rev03-2 EletronicoGraziani ZansavioNessuna valutazione finora
- Manual Rem 615 - AbbDocumento104 pagineManual Rem 615 - AbbBrandon HonmaNessuna valutazione finora
- Manual SPMMDocumento45 pagineManual SPMMAlfa TacografosNessuna valutazione finora
- Jungheinrich ETV-320Documento241 pagineJungheinrich ETV-320Claudio Rafael Deola Sada100% (1)
- Manual MPC6006 ATOS PDFDocumento149 pagineManual MPC6006 ATOS PDFEdilsonMatiasdeCastroNessuna valutazione finora
- RET630 Appl 757796 PTaDocumento88 pagineRET630 Appl 757796 PTaVictor CarvalhoNessuna valutazione finora
- Komander 36 C - SÉRIE E (Atual)Documento50 pagineKomander 36 C - SÉRIE E (Atual)helijunior67151Nessuna valutazione finora
- Relatorio Final RoboticaDocumento91 pagineRelatorio Final RoboticaWillian Alves100% (1)
- Manual Central de Alarme Vidam SiriusDocumento102 pagineManual Central de Alarme Vidam Siriusgrupoi9.contatoNessuna valutazione finora
- Manual VHD 1220 DB G6 01-21 SiteDocumento15 pagineManual VHD 1220 DB G6 01-21 SiteFernando ArataqueNessuna valutazione finora
- Manual Mpc6006 AtosDocumento149 pagineManual Mpc6006 AtosLierton PinheiroNessuna valutazione finora
- Track MotionDocumento46 pagineTrack MotionRicardo RicoNessuna valutazione finora
- Manual Cx27Documento242 pagineManual Cx27Victor AlanNessuna valutazione finora
- Manual Usuario New Holland L175Documento166 pagineManual Usuario New Holland L175carlos.acea80% (5)
- Manual de Operação 6SE31 em PortuguêsDocumento59 pagineManual de Operação 6SE31 em Portuguêsmilpaula100% (1)
- Transformador A Seco: Manual de Instalação, Operação e ManutençãoDocumento40 pagineTransformador A Seco: Manual de Instalação, Operação e ManutençãoMarcos CalegariNessuna valutazione finora
- Manual Ref615Documento788 pagineManual Ref615Andresa Lemes100% (1)
- Manual E32Documento186 pagineManual E32Wanderley Fonseca83% (6)
- ICRUDocumento44 pagineICRU25bpmi telecomNessuna valutazione finora
- Man PT de Spectra 01.04 - 23Documento87 pagineMan PT de Spectra 01.04 - 23Evando PereiraNessuna valutazione finora
- Manual Motorredutores Weg-Cestari 11-2020Documento34 pagineManual Motorredutores Weg-Cestari 11-2020pedroben1122Nessuna valutazione finora
- Manual SLEX-60 A 200HA (Solaris S9200 - 24vcc)Documento30 pagineManual SLEX-60 A 200HA (Solaris S9200 - 24vcc)Paulo Alexandre - Supervisor Manutenção HCTCO100% (1)
- DeviceNet IRC5 PortuguesDocumento108 pagineDeviceNet IRC5 PortuguesVinicius BarretoNessuna valutazione finora
- Instruções de Operação: Movitrac BDocumento128 pagineInstruções de Operação: Movitrac Bfabio cunhaNessuna valutazione finora
- Manual Tombador Versao Final 140208Documento75 pagineManual Tombador Versao Final 140208Lucas Issamu Nakasone PauloNessuna valutazione finora
- Catalogo TempoDocumento59 pagineCatalogo TempoVo SantosNessuna valutazione finora
- Manual de Instruções Britador HP - PDF PDF Barulho MáquinasDocumento1 paginaManual de Instruções Britador HP - PDF PDF Barulho Máquinashcm9650Nessuna valutazione finora
- Novo Beauty Shape Duo Somente Aparelho HTM 1Documento60 pagineNovo Beauty Shape Duo Somente Aparelho HTM 1joseNessuna valutazione finora
- WEG Weg Motor Scan Manual Geral de Instalacao e Operacao 14603136 Manual English Portuguese Spanish WebDocumento92 pagineWEG Weg Motor Scan Manual Geral de Instalacao e Operacao 14603136 Manual English Portuguese Spanish WebPaulo ShikoyNessuna valutazione finora
- Manual Bray SiemensDocumento140 pagineManual Bray SiemensMirianNessuna valutazione finora
- SAGA2000 - 1640 - Manual Do Usuário Rev3Documento41 pagineSAGA2000 - 1640 - Manual Do Usuário Rev3guest444433% (9)
- Fagor PDFDocumento360 pagineFagor PDFNatalia PauloNessuna valutazione finora
- Inversor de Frequencia Power FLX 700s Fase 2 Carca As 9-13 20d-qs004 - PT-P PDFDocumento76 pagineInversor de Frequencia Power FLX 700s Fase 2 Carca As 9-13 20d-qs004 - PT-P PDFObsol EtoNessuna valutazione finora
- Catalogo Motor BoschDocumento56 pagineCatalogo Motor BoschFabianoNessuna valutazione finora
- BMD Br000004ce1Documento73 pagineBMD Br000004ce1ALEXIA WAN DER HAAGEN100% (1)
- 02 PI PROFINET System Description Brazil 2014Documento41 pagine02 PI PROFINET System Description Brazil 2014Francisco PinheiroNessuna valutazione finora
- Portoghese Rev15 Cod01Documento64 paginePortoghese Rev15 Cod01Assistencia Tecnica MSNessuna valutazione finora
- Catálogo Truck Center WEB CompletoDocumento44 pagineCatálogo Truck Center WEB CompletoMarcos LeandroNessuna valutazione finora
- Manual CamerasDocumento13 pagineManual CamerasHungria EngenhariaNessuna valutazione finora
- Implementando Um Inversor De Frequência Com Dspic Escalar Programado No Dspic30f E Mikroc Com Driver Para Motor De Até 3 CvDa EverandImplementando Um Inversor De Frequência Com Dspic Escalar Programado No Dspic30f E Mikroc Com Driver Para Motor De Até 3 CvNessuna valutazione finora
- Manual Rede Devicenet PowerFlex 753Documento148 pagineManual Rede Devicenet PowerFlex 753Artur Henrique100% (1)
- Operator Manual Vario Terminal PTDocumento220 pagineOperator Manual Vario Terminal PTLeandro AraújoNessuna valutazione finora
- Manual Inversor - MD200A - 2022Documento200 pagineManual Inversor - MD200A - 2022Vagner SilvaNessuna valutazione finora
- Powerflex520 032905Documento172 paginePowerflex520 032905Pedro CarvalhoNessuna valutazione finora
- Delta Manual DVP Portugues PDF Parte1Documento100 pagineDelta Manual DVP Portugues PDF Parte1Maria JosefaNessuna valutazione finora
- AlinhadorPortatilDigital JMDocumento57 pagineAlinhadorPortatilDigital JMAlinhart EquipamentosNessuna valutazione finora
- Manual de Operação e Manutenção - Central TransportavelDocumento142 pagineManual de Operação e Manutenção - Central TransportavelluanabarrosNessuna valutazione finora
- Instramed - Cardiomax8 - Manual Do Usuário Rev17Documento195 pagineInstramed - Cardiomax8 - Manual Do Usuário Rev17Patricia SouzaNessuna valutazione finora
- Ecafix MDF03Documento34 pagineEcafix MDF03Jeosafá Pereira89% (9)
- Manual Clic02Documento99 pagineManual Clic02Senhor Das MaquinasNessuna valutazione finora
- PFC Eduardo - Guilherme - Victor Ac-19557Documento56 paginePFC Eduardo - Guilherme - Victor Ac-19557Idamara Lobo DiasNessuna valutazione finora
- Manual Nobreak SMS Sinus Double II Black NTDocumento48 pagineManual Nobreak SMS Sinus Double II Black NTteodorojrNessuna valutazione finora
- BMD Br000002ce1Documento68 pagineBMD Br000002ce1Vitor Opatski100% (2)
- Manual Ec PDFDocumento40 pagineManual Ec PDFFelipe Antunes100% (1)
- HTM - Light Pulse (Fisioterapia)Documento50 pagineHTM - Light Pulse (Fisioterapia)Pedro Augusto MeloNessuna valutazione finora
- Gerando Onda Dente De Serra No Dspic30f E MikrocDa EverandGerando Onda Dente De Serra No Dspic30f E MikrocNessuna valutazione finora
- BOSCH Manual de Garantia Autopeças 3 Edição 2009Documento159 pagineBOSCH Manual de Garantia Autopeças 3 Edição 2009Gilberto JuniorNessuna valutazione finora
- Catalogo Linha Pesada 2018-87 - Bepo PDFDocumento106 pagineCatalogo Linha Pesada 2018-87 - Bepo PDFInformaçõesNessuna valutazione finora
- Apresent Diag Falhas 2 24-Ago-09 02Documento141 pagineApresent Diag Falhas 2 24-Ago-09 02Filipe Borges Marra91% (22)
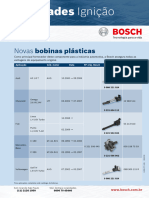
- BOSCH Novidades - Bobinaplastica - 2010Documento1 paginaBOSCH Novidades - Bobinaplastica - 2010Gilberto JuniorNessuna valutazione finora
- Centauro Catálogo PesadaDocumento60 pagineCentauro Catálogo PesadaGilberto JuniorNessuna valutazione finora
- Catalogo Axios 2017Documento259 pagineCatalogo Axios 2017Rogerio EduardoNessuna valutazione finora
- BOSCH Novidades - Cabos - IgnicaoDocumento2 pagineBOSCH Novidades - Cabos - IgnicaoGilberto JuniorNessuna valutazione finora
- BOSCH Manual de Garantia Autopeças 3 Edição 2009Documento159 pagineBOSCH Manual de Garantia Autopeças 3 Edição 2009Gilberto JuniorNessuna valutazione finora
- Tabela 4 3 11 Versao 1.24 Atualizada 30.05.2018Documento51 pagineTabela 4 3 11 Versao 1.24 Atualizada 30.05.2018Rosana ValérioNessuna valutazione finora
- Tabela de Preços EffaDocumento456 pagineTabela de Preços EffaGilberto JuniorNessuna valutazione finora
- Tempos Plataforma-DieselDocumento16 pagineTempos Plataforma-DieselGilberto JuniorNessuna valutazione finora
- Ald Tabela Revisao Preco Fixo BCSDocumento6 pagineAld Tabela Revisao Preco Fixo BCSGilberto JuniorNessuna valutazione finora
- VW Carroceria Conforto 3Documento3 pagineVW Carroceria Conforto 3Gilberto JuniorNessuna valutazione finora
- VW AirBag Airbag VWDocumento6 pagineVW AirBag Airbag VWGilberto JuniorNessuna valutazione finora
- Cat Leve Spaal FORDDocumento11 pagineCat Leve Spaal FORDDiógenes Ferreira BatistaNessuna valutazione finora
- 5s 2Documento17 pagine5s 2api-3704990100% (1)
- Catalogo Granero Linha Leve 2014 PDFDocumento40 pagineCatalogo Granero Linha Leve 2014 PDFCristtian Eduardo RovedaNessuna valutazione finora
- VW Transmissão IMotion C348VDocumento3 pagineVW Transmissão IMotion C348VGilberto JuniorNessuna valutazione finora
- Catalogo - Injecao Eletrônica - 2008 - 2009 BOSCH PDFDocumento246 pagineCatalogo - Injecao Eletrônica - 2008 - 2009 BOSCH PDFRaphael BatistaNessuna valutazione finora
- Moto Pecas Catálogo Março 17Documento62 pagineMoto Pecas Catálogo Março 17Gilberto Junior100% (1)
- Perguntas Respostas NFCeDocumento13 paginePerguntas Respostas NFCeAbelMouraNessuna valutazione finora
- 5s 2Documento17 pagine5s 2api-3704990100% (1)
- Apostila Treinamento de 5'SDocumento19 pagineApostila Treinamento de 5'Srgfalima100% (2)
- Teoria Da AdministraçãoDocumento31 pagineTeoria Da AdministraçãoGilberto JuniorNessuna valutazione finora
- Diga Adeus À Poupança - Parte 1Documento20 pagineDiga Adeus À Poupança - Parte 1robsilvasonNessuna valutazione finora
- Salvador Antiga em Imagens PDFDocumento62 pagineSalvador Antiga em Imagens PDFLeo RudáNessuna valutazione finora
- Empresa Familiar e As Dificuldades Enfrentadas Pelos Membros Da Terceira Geração PDFDocumento27 pagineEmpresa Familiar e As Dificuldades Enfrentadas Pelos Membros Da Terceira Geração PDFGilberto JuniorNessuna valutazione finora
- Negociando Com o BancoDocumento12 pagineNegociando Com o BancoGilberto JuniorNessuna valutazione finora
- Diretrizes Sobre Sistemas de Gestão Da Segurança e Saúde No TrabalhoDocumento50 pagineDiretrizes Sobre Sistemas de Gestão Da Segurança e Saúde No TrabalhoFelipe MenegonNessuna valutazione finora
- Como Identificar e Definir Os Processos Da Sua EmpresaDocumento17 pagineComo Identificar e Definir Os Processos Da Sua EmpresasjpioNessuna valutazione finora
- John Deer 9lDocumento37 pagineJohn Deer 9lHamid Essarbouti100% (6)
- Tabela de Torque de Motores-1Documento4 pagineTabela de Torque de Motores-1Barra Nova Ferreira100% (1)
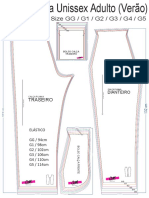
- Calça de Pijama Unissex Verão (GG Ao G5)Documento1 paginaCalça de Pijama Unissex Verão (GG Ao G5)jean christophe de massiaNessuna valutazione finora
- pss5100 510 CDocumento36 paginepss5100 510 CRodrigo CaldeiraNessuna valutazione finora
- Exercicio ABC 21-05Documento5 pagineExercicio ABC 21-05Alex Sandro Dos Santos100% (3)
- Tutorial Do chipRESETER - MGE141107Documento8 pagineTutorial Do chipRESETER - MGE141107Rubenildo AcioleNessuna valutazione finora
- Exercícios Resolvidos GrafoDocumento14 pagineExercícios Resolvidos GrafoMaykel De Souza MariaNessuna valutazione finora
- VSC - Cadastro de Nova Operadora - V1.02 - PTDocumento11 pagineVSC - Cadastro de Nova Operadora - V1.02 - PTPeganet Miguel PereiraNessuna valutazione finora
- 234 LinuxDocumento64 pagine234 Linux3sss.turismoNessuna valutazione finora
- Hp-9s-pt ManualDocumento2 pagineHp-9s-pt ManualthannyNessuna valutazione finora
- Manual de Servi o XVS 650Documento315 pagineManual de Servi o XVS 650Alex Franco70% (10)
- Item 01 - CPM - Multimedição - Rev.00Documento27 pagineItem 01 - CPM - Multimedição - Rev.00Ricardo LemesNessuna valutazione finora
- Apostilas Senior - Manual Listagens e Relatórios OperacionaisDocumento28 pagineApostilas Senior - Manual Listagens e Relatórios OperacionaisFabio OliveiraNessuna valutazione finora
- Gabarito - para Estudo!Documento34 pagineGabarito - para Estudo!Priscila DahmerNessuna valutazione finora
- Apostila Do Kit Eletrônica Digital XD101 - RevCDocumento162 pagineApostila Do Kit Eletrônica Digital XD101 - RevCIdílio CasimiroNessuna valutazione finora
- Manual de Serviço D 461 - A3Documento9 pagineManual de Serviço D 461 - A3Elebrane Honorato dos SantosNessuna valutazione finora
- Adolfo Do Nascimento Castilho: Indústria de VideogamesDocumento47 pagineAdolfo Do Nascimento Castilho: Indústria de VideogamesRonald LoppesNessuna valutazione finora
- ps3 ErrosDocumento3 pagineps3 ErrosTHIRO10Nessuna valutazione finora
- Nossos Robôs - Arduino Com MATLAB! Mini TutorialDocumento7 pagineNossos Robôs - Arduino Com MATLAB! Mini TutorialSarah Silveira MendesNessuna valutazione finora
- Manual PositronDocumento2 pagineManual PositronMariana NunesNessuna valutazione finora
- Tutorial de Matlab (UFMS) 3Documento4 pagineTutorial de Matlab (UFMS) 3Claudio CavalcanteNessuna valutazione finora
- Manual Honda City 2014 PDFDocumento228 pagineManual Honda City 2014 PDFMarcelo100% (1)
- Sistemas Operacionais WindowsDocumento68 pagineSistemas Operacionais WindowsManoel MessiasNessuna valutazione finora
- Proforma MateriaisDocumento4 pagineProforma MateriaisHelder RamadãoNessuna valutazione finora
- Laboratorio de HardwareDocumento2 pagineLaboratorio de HardwareCesar FreitasNessuna valutazione finora
- GE M-Pact PDFDocumento20 pagineGE M-Pact PDFMohamed Saber100% (1)
- Apostila 89S52Documento19 pagineApostila 89S52Valdenir_DuarteNessuna valutazione finora
- Manual PR Electronics - 5333V111 - BRDocumento27 pagineManual PR Electronics - 5333V111 - BRg3qwsfNessuna valutazione finora
- A Evolução Dos MicroprocessadoresDocumento18 pagineA Evolução Dos MicroprocessadoresTiãoBento100% (1)
- Divisor SLR 504aDocumento1 paginaDivisor SLR 504afranciscoNessuna valutazione finora