Potrebbero piacerti anche
- Method of For Machinery: Efficient Vibration A DecisionDocumento11 pagineMethod of For Machinery: Efficient Vibration A DecisionfaisalNessuna valutazione finora
- ED009 - Approved Training CoursesDocumento3 pagineED009 - Approved Training CoursesJay PatelNessuna valutazione finora
- What Is ResonanceDocumento5 pagineWhat Is ResonancecatraioNessuna valutazione finora
- PDM in Action-eBookDocumento24 paginePDM in Action-eBookFELIX VALERANessuna valutazione finora
- Oil Whirl and Whip Instabilities - Within Journal BearingsDocumento3 pagineOil Whirl and Whip Instabilities - Within Journal BearingsChristopher GarciaNessuna valutazione finora
- Betavib Vibworks Data Collector, Analyzer, and Balancer - Information BrochureDocumento16 pagineBetavib Vibworks Data Collector, Analyzer, and Balancer - Information BrochureManoj KumarNessuna valutazione finora
- TDI Indicator For Mobile PDFDocumento2 pagineTDI Indicator For Mobile PDFSidibe MoctarNessuna valutazione finora
- FRF VibrationDocumento29 pagineFRF VibrationTheerayootNessuna valutazione finora
- Handbook of Reliability Prediction Procedures For Mechanical Equipment 15 May 2011 PP 235Documento1 paginaHandbook of Reliability Prediction Procedures For Mechanical Equipment 15 May 2011 PP 235VILLANUEVA_DANIEL2064Nessuna valutazione finora
- Surge Testing DC MotorsDocumento16 pagineSurge Testing DC MotorskirkbmbNessuna valutazione finora
- Oil WhirlDocumento10 pagineOil WhirlAftabNessuna valutazione finora
- Kanakpura Planning Authority CompiledDocumento64 pagineKanakpura Planning Authority CompiledJohnNessuna valutazione finora
- OceanEng ResumesDocumento84 pagineOceanEng ResumesChristoper NavaNessuna valutazione finora
- 2 - Slow Speed Vibration Signal AnalysisDocumento9 pagine2 - Slow Speed Vibration Signal AnalysisSasi NimmakayalaNessuna valutazione finora
- Vib - AccelerometerDocumento16 pagineVib - AccelerometerMahmoud SobhyNessuna valutazione finora
- Motor Current Signature AnalysisDocumento25 pagineMotor Current Signature Analysismayur dhandeNessuna valutazione finora
- LG-6001 Lead Gage: Operation ManualDocumento24 pagineLG-6001 Lead Gage: Operation ManualSukumarNessuna valutazione finora
- Sgs Ind NDT Guided Wave A4 en 10Documento2 pagineSgs Ind NDT Guided Wave A4 en 10Mohamed Zied ChaariNessuna valutazione finora
- Thermography Glossary TermsDocumento14 pagineThermography Glossary TermsMohamed Al-OdatNessuna valutazione finora
- Falcon OneprodDocumento18 pagineFalcon OneprodGiova ToaNessuna valutazione finora
- "Soybean Volatile Week Ends in Red: Analyst SpeaksDocumento10 pagine"Soybean Volatile Week Ends in Red: Analyst Speaksapi-234732356Nessuna valutazione finora
- Modal Testing Theory and PracticeDocumento166 pagineModal Testing Theory and PracticeGianluca FacchiniNessuna valutazione finora
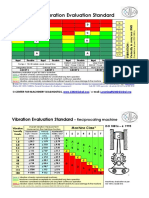
- Vibration SeverityDocumento19 pagineVibration Severityanon_900141394Nessuna valutazione finora
- Paper InspectingSeamlessPipeWeldsofVariableWallThic PDFDocumento14 paginePaper InspectingSeamlessPipeWeldsofVariableWallThic PDFbrocolinoNessuna valutazione finora
- Inspection Unit Technical Services Department Fatima Fertilizers Company LimitedDocumento8 pagineInspection Unit Technical Services Department Fatima Fertilizers Company LimitedAnonymous gWKgdUBNessuna valutazione finora
- Vib ExpertDocumento4 pagineVib ExpertGigih PrasetiyoNessuna valutazione finora
- @ptitude AnalysistDocumento295 pagine@ptitude AnalysistHần Phạm VănNessuna valutazione finora
- Using PeakVue Plus Technology For Detecting Anti Friction Bearing FaultsDocumento11 pagineUsing PeakVue Plus Technology For Detecting Anti Friction Bearing Faultseko bagus sunaryo100% (1)
- FINAL Revised USFD Manual 2012Documento135 pagineFINAL Revised USFD Manual 2012Mitesh KumarNessuna valutazione finora
- TN 7 VibxpertDocumento1 paginaTN 7 VibxpertBahtiar YudhistiraNessuna valutazione finora
- Ijbgm - Corporate Social Responsibility A Contribution by Indian Banks - Puneet KaurDocumento18 pagineIjbgm - Corporate Social Responsibility A Contribution by Indian Banks - Puneet Kauriaset123Nessuna valutazione finora
- Pitfalls in The Analysis of Machinery Vibration MeasurementsDocumento7 paginePitfalls in The Analysis of Machinery Vibration MeasurementsTheerayoot PoomchaiNessuna valutazione finora
- Vehicle and Driver Vibration - PPTDocumento16 pagineVehicle and Driver Vibration - PPTAnirban MitraNessuna valutazione finora
- Bill Overview: Jlb9Frg6Bpfgxfivcivc Ykpfi9Rhekywktxmvc4Vivcmtgap 7FDocumento5 pagineBill Overview: Jlb9Frg6Bpfgxfivcivc Ykpfi9Rhekywktxmvc4Vivcmtgap 7FamirfaridNessuna valutazione finora
- GF300 GF320 Datasheet USDocumento2 pagineGF300 GF320 Datasheet USingdimitriospino_110Nessuna valutazione finora
- 4.VA For NVEDocumento4 pagine4.VA For NVESanjeevi Kumar SpNessuna valutazione finora
- 8 9 EMEC Polyphase Induction Machines Part I&IIDocumento52 pagine8 9 EMEC Polyphase Induction Machines Part I&IIOruc MusayevNessuna valutazione finora
- Harmonics Training May 2012 WebinarDocumento35 pagineHarmonics Training May 2012 WebinarMarvin TejerinaNessuna valutazione finora
- Iso 10816 Vibration StandardDocumento2 pagineIso 10816 Vibration StandardDarío IbarraNessuna valutazione finora
- Petroskills Cat: (Competency Analysis Tool)Documento2 paginePetroskills Cat: (Competency Analysis Tool)profmkc2001Nessuna valutazione finora
- Bearing TestersDocumento6 pagineBearing TestersAshwani KansaraNessuna valutazione finora
- Basic-Engineering - Electrical EngineeringDocumento227 pagineBasic-Engineering - Electrical EngineeringE-m FunaNessuna valutazione finora
- Gear WhineDocumento12 pagineGear WhineZhengNessuna valutazione finora
- Field Alignment Kit: Hardware ManualDocumento12 pagineField Alignment Kit: Hardware ManualAnonymous dPyHoLNessuna valutazione finora
- User Manual: PF0.9 1K/1.5K/2K/3K Online UPSDocumento19 pagineUser Manual: PF0.9 1K/1.5K/2K/3K Online UPSDuvan VacaNessuna valutazione finora
- BearingFaultDetectionTechniques AReviewDocumento19 pagineBearingFaultDetectionTechniques AReviewFaisal DilbaghNessuna valutazione finora
- Theory of Machines II Lab ManualDocumento25 pagineTheory of Machines II Lab ManualMIKE LESIBA CHOKOENessuna valutazione finora
- Epe 1999 12 PDFDocumento5 pagineEpe 1999 12 PDFLeonard GržetićNessuna valutazione finora
- A Study On The Effectiveness of Active F PDFDocumento6 pagineA Study On The Effectiveness of Active F PDFphantom29Nessuna valutazione finora
- Tackling A Heavy Issue: Understanding Correct Placement of Trial WeightsDocumento4 pagineTackling A Heavy Issue: Understanding Correct Placement of Trial WeightsSreekanthMylavarapuNessuna valutazione finora
- Theory of Machines Lab ManualDocumento26 pagineTheory of Machines Lab Manualvamsi krishna balagaNessuna valutazione finora
- Theoryof Machines Lab ManualDocumento26 pagineTheoryof Machines Lab ManualatikmkaziNessuna valutazione finora
- Universal Governor Apparatus ManualDocumento17 pagineUniversal Governor Apparatus Manual2020 83 Harshvardhan PatilNessuna valutazione finora
- Tom-Ii Lab ManualDocumento26 pagineTom-Ii Lab ManualTochi Krishna AbhishekNessuna valutazione finora
- E106 Uniform Circular MotionDocumento6 pagineE106 Uniform Circular MotionNeilIsidoreReyesAlentonNessuna valutazione finora
- Lab5a Fa10Documento4 pagineLab5a Fa10alexlenevez_12130% (1)
- CE361 Lab - 5more - Jet - Impact - ApparatusDocumento4 pagineCE361 Lab - 5more - Jet - Impact - ApparatusZainab FarooqNessuna valutazione finora
- Oscilloscope For Circuits 2Documento39 pagineOscilloscope For Circuits 2John GutierrezNessuna valutazione finora
- Dynamics Lab MANUAL New PrintDocumento56 pagineDynamics Lab MANUAL New PrintMartin De Boras PragashNessuna valutazione finora
- Lab 4: Phase Shift OscillatorDocumento2 pagineLab 4: Phase Shift OscillatorIrvan ReynaldiNessuna valutazione finora
- Emisivity Table PDFDocumento16 pagineEmisivity Table PDFAditya ChandraNessuna valutazione finora
- Surge in A Centrifugal CompressorDocumento33 pagineSurge in A Centrifugal CompressorTheerayoot100% (1)
- Neale Consulting Engineers WWW - Tribology.co - UkDocumento20 pagineNeale Consulting Engineers WWW - Tribology.co - UkTheerayootNessuna valutazione finora
- Generator RotorDocumento1 paginaGenerator RotorAnkur SahariaNessuna valutazione finora
- MSD Multi-Stage Dual Volute PumpsDocumento24 pagineMSD Multi-Stage Dual Volute PumpsTheerayootNessuna valutazione finora
- Diagnosing Rotor Bar Issues With Torque and Current Signature AnalysisDocumento11 pagineDiagnosing Rotor Bar Issues With Torque and Current Signature AnalysisJose Alejandro Mansutti G100% (1)
- GA Airend Disassembly2 PDFDocumento5 pagineGA Airend Disassembly2 PDFTheerayoot100% (1)
- Coatings For Abrasive Service: Courtesy of Sulzer Metco Coating ServicesDocumento4 pagineCoatings For Abrasive Service: Courtesy of Sulzer Metco Coating ServicesTheerayootNessuna valutazione finora
- Sulzer PresentationDocumento52 pagineSulzer PresentationAnil_Nambiaruveetil100% (10)
- SKF Handbook Bearings in Twin CompressorsDocumento60 pagineSKF Handbook Bearings in Twin CompressorsAlvaro Munoz100% (2)
- SealsDocumento5 pagineSealsU0U0INessuna valutazione finora
- Rotating Stall PDFDocumento22 pagineRotating Stall PDFTheerayootNessuna valutazione finora
- 400 Don 4Documento9 pagine400 Don 4DarioNessuna valutazione finora
- Evaluating Induction Motor Rotor BarsDocumento10 pagineEvaluating Induction Motor Rotor BarsBurhan Syah PutraNessuna valutazione finora
- Gas Engine - Cat INTRODUCTION-final-2Documento15 pagineGas Engine - Cat INTRODUCTION-final-2TheerayootNessuna valutazione finora
- Gas Engines Oils TechPaperDocumento15 pagineGas Engines Oils TechPaperZamani Mahdi100% (1)
- Reduce Fan Noise & Vibration with Proper DesignDocumento6 pagineReduce Fan Noise & Vibration with Proper Designsnappish1Nessuna valutazione finora
- How Much Grease is Needed for BearingsDocumento3 pagineHow Much Grease is Needed for BearingsTheerayootNessuna valutazione finora
- Bearing AnalysisDocumento42 pagineBearing AnalysisTheerayoot100% (2)
- 237219Documento10 pagine237219Nor Azman SaaidNessuna valutazione finora
- Impact Hammer PDFDocumento4 pagineImpact Hammer PDFTheerayootNessuna valutazione finora
- Reba ViDocumento13 pagineReba ViJaques ValleNessuna valutazione finora
- Gea31062 Orbitv34n2 2014apr HRDocumento32 pagineGea31062 Orbitv34n2 2014apr HRAnil Pahuja100% (1)
- Checking Bearing AlignmentDocumento4 pagineChecking Bearing AlignmentTheerayootNessuna valutazione finora
- FRF VibrationDocumento29 pagineFRF VibrationTheerayootNessuna valutazione finora
- Gsi 124Documento5 pagineGsi 124TheerayootNessuna valutazione finora
- FRF InstructionsDocumento2 pagineFRF InstructionsTheerayootNessuna valutazione finora
- EpsDocumento1 paginaEpsTheerayootNessuna valutazione finora
- Gsi 122 & 130Documento2 pagineGsi 122 & 130TheerayootNessuna valutazione finora
- 3500 Galvanic Isolator Interface: ManualDocumento36 pagine3500 Galvanic Isolator Interface: ManualTheerayootNessuna valutazione finora
- Laying Out A Compound Curve: Engineering SurveysDocumento7 pagineLaying Out A Compound Curve: Engineering SurveysLara GatbontonNessuna valutazione finora
- SPECTROPHOTOMETER INSTRUCTIONSDocumento2 pagineSPECTROPHOTOMETER INSTRUCTIONSItzel H. ArmentaNessuna valutazione finora
- Module 4 Pre-assessment: Reference Angles, ConversionsDocumento3 pagineModule 4 Pre-assessment: Reference Angles, ConversionsMarcus Ceazar SisonNessuna valutazione finora
- Straw Rocket LabDocumento4 pagineStraw Rocket Labaaguiar1Nessuna valutazione finora
- Aiag Gage R&R Part Number Average & Range MethodDocumento30 pagineAiag Gage R&R Part Number Average & Range Methodpeter25munchenNessuna valutazione finora
- Guidelines On The Calibration of Digital Multimeters: EURAMET cg-15Documento18 pagineGuidelines On The Calibration of Digital Multimeters: EURAMET cg-15pankrasius herbudiNessuna valutazione finora
- Physical QuantitiesDocumento16 paginePhysical QuantitiesLuis AndersonNessuna valutazione finora
- (I) Direct Method of MeasurementDocumento7 pagine(I) Direct Method of MeasurementAakib alamNessuna valutazione finora
- Industrial Pressure Measurement GuideDocumento49 pagineIndustrial Pressure Measurement GuideArjay T. EspinoNessuna valutazione finora
- MSL - TG12 - Calidad de Medición MasasDocumento3 pagineMSL - TG12 - Calidad de Medición MasasDANIEL FELIPE ROSAS GARNICANessuna valutazione finora
- 6200 User ManualDocumento10 pagine6200 User ManualLuis Alfonso Prada LeonNessuna valutazione finora
- Blip 1Documento10 pagineBlip 1Dilusha SilvaNessuna valutazione finora
- Conversion Table (Similar in Values) - Example: Pecaha N No - Bulat (JUTA) Perpuluha N % JAM Jisim Panjang IsipaduDocumento6 pagineConversion Table (Similar in Values) - Example: Pecaha N No - Bulat (JUTA) Perpuluha N % JAM Jisim Panjang IsipaduJPN MELAKANessuna valutazione finora
- Leveling notes for road project determine elevationsDocumento4 pagineLeveling notes for road project determine elevationsNeilyn Bongalan100% (1)
- Cheat Sheet CIDocumento1 paginaCheat Sheet CIPatricia RoblesNessuna valutazione finora
- 01 Data Handling & MeasurementDocumento17 pagine01 Data Handling & Measurementjgd2080Nessuna valutazione finora
- Detection Limits of Chemical Sensors: Applications and MisapplicationsDocumento7 pagineDetection Limits of Chemical Sensors: Applications and MisapplicationsElbahi DjaalabNessuna valutazione finora
- Lab 5 - Thermocouple Temperature Calibration (PRTS)Documento7 pagineLab 5 - Thermocouple Temperature Calibration (PRTS)Slim ShaddysNessuna valutazione finora
- Sextant by MR - CharisDocumento4 pagineSextant by MR - CharisCharis Israel AnchaNessuna valutazione finora
- 2-4 Calibration2Documento8 pagine2-4 Calibration2Ganesh DongreNessuna valutazione finora
- 0517calibration MultipleDocumento7 pagine0517calibration MultiplepchakkrapaniNessuna valutazione finora
- Mathematics: Self-Learning Module 1Documento18 pagineMathematics: Self-Learning Module 1Dann LumayagNessuna valutazione finora
- Advanced Surveying Using Total Station (Repaired) PDFDocumento141 pagineAdvanced Surveying Using Total Station (Repaired) PDFpradeep singh100% (1)
- Accurate Pune.C0052Documento12 pagineAccurate Pune.C0052Ravichandran DNessuna valutazione finora
- AMCA 500 D 07 Damper TestingDocumento74 pagineAMCA 500 D 07 Damper TestingMMMOH200100% (1)
- Advance - Surveying ASSIGNMENTDocumento8 pagineAdvance - Surveying ASSIGNMENTAmmar VanankNessuna valutazione finora
- Rapp - Geom - Geod - Vol - II - Rev PDFDocumento225 pagineRapp - Geom - Geod - Vol - II - Rev PDFFelipe Carvajal RodríguezNessuna valutazione finora
- Sextant CalculationDocumento12 pagineSextant Calculationtanerkpt100% (1)
- Price List Lab Nano ITBDocumento6 paginePrice List Lab Nano ITBsatryo wibowoNessuna valutazione finora
- 01 Engineering Surveys PDFDocumento58 pagine01 Engineering Surveys PDFRey Christopher Castillo100% (1)