Potrebbero piacerti anche
- Resumen Ana MariaDocumento3 pagineResumen Ana MariaYeffer Puma MesccoNessuna valutazione finora
- Resumen San Judas TadeoDocumento2 pagineResumen San Judas TadeoYeffer Puma MesccoNessuna valutazione finora
- Oficio IntiDocumento1 paginaOficio IntiYeffer Puma MesccoNessuna valutazione finora
- Ver-Resumen INAMBARI CARMENDocumento3 pagineVer-Resumen INAMBARI CARMENYeffer Puma MesccoNessuna valutazione finora
- Ver-Resumen DRAGON DORADO IDocumento2 pagineVer-Resumen DRAGON DORADO IYeffer Puma MesccoNessuna valutazione finora
- Ver ResumenDocumento2 pagineVer ResumenYeffer Puma MesccoNessuna valutazione finora
- Resumen SAN BENITO DE PALERMODocumento2 pagineResumen SAN BENITO DE PALERMOYeffer Puma MesccoNessuna valutazione finora
- Instrucciones para Del Llenado de Formulario #U00c3#U0161nico de Edificaci#U00c3#U00b3n PDFDocumento6 pagineInstrucciones para Del Llenado de Formulario #U00c3#U0161nico de Edificaci#U00c3#U00b3n PDFRaineiro Esteban Sanchez CuzcanoNessuna valutazione finora
- Cerebro PartesDocumento15 pagineCerebro PartesmaopelsaNessuna valutazione finora
- 1er Examen de Tec Del Concreto2Documento2 pagine1er Examen de Tec Del Concreto2Yeffer Puma MesccoNessuna valutazione finora
- A.jurado Aquino Amide AlidaDocumento1 paginaA.jurado Aquino Amide AlidaYeffer Puma MesccoNessuna valutazione finora
- FichaProyecto 1812 708890Documento2 pagineFichaProyecto 1812 708890Yeffer Puma MesccoNessuna valutazione finora
- CONCESIONDocumento3 pagineCONCESIONMiguel AngelNessuna valutazione finora
- MARIA SAC SUBGTE 2 MinutaDocumento6 pagineMARIA SAC SUBGTE 2 MinutaYeffer Puma MesccoNessuna valutazione finora
- Mi Primeros Pasos BecaContinuidadEstudios2020II PDFDocumento1 paginaMi Primeros Pasos BecaContinuidadEstudios2020II PDFYeffer Puma MesccoNessuna valutazione finora
- AerobicDocumento3 pagineAerobicYeffer Puma MesccoNessuna valutazione finora
- Declaracion Jurada de Habilidad ProfesionalDocumento1 paginaDeclaracion Jurada de Habilidad ProfesionalEder Diaz FloresNessuna valutazione finora
- Solo LecDocumento6 pagineSolo LecYeffer Puma MesccoNessuna valutazione finora
- Coordenadas AurominaDocumento2 pagineCoordenadas AurominaYeffer Puma MesccoNessuna valutazione finora
- NuevoDocumento 2019-05-20Documento7 pagineNuevoDocumento 2019-05-20Yeffer Puma MesccoNessuna valutazione finora
- Regl. Compl. - 17798Documento39 pagineRegl. Compl. - 17798Freddy EspinozaNessuna valutazione finora
- Estados Financieros (PDF) 99579730 201312Documento177 pagineEstados Financieros (PDF) 99579730 201312Yeffer Puma MesccoNessuna valutazione finora
- El CerebroDocumento23 pagineEl Cerebrojuanmahm100% (1)
- Ingeniería en SacsayhuamanDocumento2 pagineIngeniería en SacsayhuamanYeffer Puma MesccoNessuna valutazione finora
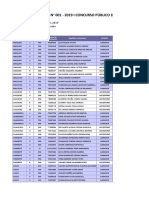
- Prac #001 - 2019 I Concurso Público de Practicantes Pre-ProfesionalesDocumento24 paginePrac #001 - 2019 I Concurso Público de Practicantes Pre-ProfesionalesCarlos NavarreteNessuna valutazione finora
- Información Importante!Documento1 paginaInformación Importante!Steven RamosNessuna valutazione finora
- Curriculum Vitae Modelo1 Azul WordDocumento2 pagineCurriculum Vitae Modelo1 Azul WordgabrielNessuna valutazione finora
- DocumentDocumento3 pagineDocumentYeffer Puma MesccoNessuna valutazione finora
- Laboratorio Fisica EscaneadoDocumento7 pagineLaboratorio Fisica EscaneadoYeffer Puma MesccoNessuna valutazione finora