Potrebbero piacerti anche
- Profit From Your Forecasting Software: A Best Practice Guide for Sales ForecastersDa EverandProfit From Your Forecasting Software: A Best Practice Guide for Sales ForecastersNessuna valutazione finora
- Pulp Documentation: Release 1.4.6Documento58 paginePulp Documentation: Release 1.4.6David Esteban Meneses RendicNessuna valutazione finora
- Integrated Business Planning A Complete Guide - 2020 EditionDa EverandIntegrated Business Planning A Complete Guide - 2020 EditionNessuna valutazione finora
- PulpDocumento12 paginePulpfacebookNessuna valutazione finora
- Supply Chain Execution Predictive Analytics Second EditionDa EverandSupply Chain Execution Predictive Analytics Second EditionNessuna valutazione finora
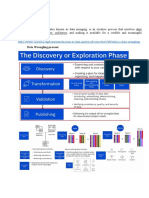
- Data Wrangling, Also Known As Data Munging, Is An Iterative Process That Involves DataDocumento9 pagineData Wrangling, Also Known As Data Munging, Is An Iterative Process That Involves DataAlexandrina LikovaNessuna valutazione finora
- Introduction to Machine Learning in the Cloud with Python: Concepts and PracticesDa EverandIntroduction to Machine Learning in the Cloud with Python: Concepts and PracticesNessuna valutazione finora
- Data Quality Administration GuideDocumento210 pagineData Quality Administration GuideVictoria TovbinaNessuna valutazione finora
- Production Activity ControlDocumento73 pagineProduction Activity Controltwinkz007Nessuna valutazione finora
- (Excerpts From) Investigating Performance: Design and Outcomes With XapiDa Everand(Excerpts From) Investigating Performance: Design and Outcomes With XapiNessuna valutazione finora
- Programming Paradigms For Dummies: What Every Programmer Should KnowDocumento39 pagineProgramming Paradigms For Dummies: What Every Programmer Should Knowakj504100% (1)
- Name: Reena Kale Te Comps Roll No: 23 DWM Experiment No: 1 Title: Designing A Data Warehouse Schema For A Case Study and PerformingDocumento7 pagineName: Reena Kale Te Comps Roll No: 23 DWM Experiment No: 1 Title: Designing A Data Warehouse Schema For A Case Study and PerformingReena KaleNessuna valutazione finora
- Anylogistix ALX TrainingDocumento273 pagineAnylogistix ALX Trainingdesp100% (1)
- Introduction To Materials Management, 8e Introduction To Materials Management, 8eDocumento48 pagineIntroduction To Materials Management, 8e Introduction To Materials Management, 8eShahadNessuna valutazione finora
- Software Architecture For Developers SampleDocumento29 pagineSoftware Architecture For Developers SampleDironNessuna valutazione finora
- Sparx Design PatternsDocumento32 pagineSparx Design PatternsMatthew LawlerNessuna valutazione finora
- Monte Carlo MethodDocumento23 pagineMonte Carlo MethodCHINGZU212Nessuna valutazione finora
- SAS High-Perfom ForecastingDocumento492 pagineSAS High-Perfom ForecastingJuliaZRNessuna valutazione finora
- An Operational Application of System Dynamics in The Automotive Industry: Inventory Management at BMWDocumento10 pagineAn Operational Application of System Dynamics in The Automotive Industry: Inventory Management at BMWGourav DebNessuna valutazione finora
- Introduction To Materials ManagementDocumento24 pagineIntroduction To Materials ManagementJonathan GonzálezNessuna valutazione finora
- Complex Event Processing With Apache Flink PresentationDocumento49 pagineComplex Event Processing With Apache Flink Presentationanibal.vmezaNessuna valutazione finora
- Best Practices Writing Production-Grade PySpark JobsDocumento11 pagineBest Practices Writing Production-Grade PySpark JobsRahul DasNessuna valutazione finora
- Beginners Guide To Data Science - A Twics Guide 1Documento41 pagineBeginners Guide To Data Science - A Twics Guide 1Jeffin VargheseNessuna valutazione finora
- Connecting To Data SourcesDocumento394 pagineConnecting To Data SourceskhaleelapNessuna valutazione finora
- Big Data Analytics Options On AWSDocumento55 pagineBig Data Analytics Options On AWSmanaskanukurthi100% (1)
- Marketsn WhitepaperDocumento26 pagineMarketsn WhitepaperRohan Gulati100% (1)
- Project Report PDFDocumento11 pagineProject Report PDFBingoNessuna valutazione finora
- Supply Chain ManagementDocumento9 pagineSupply Chain Managementseff ongcaNessuna valutazione finora
- Data Wrangling PDFDocumento14 pagineData Wrangling PDFEdgar GuerreroNessuna valutazione finora
- Data Wrangling Cheatsheet PDFDocumento2 pagineData Wrangling Cheatsheet PDFsreedharNessuna valutazione finora
- Summer Intern Project Submitted By: Manindra Konda IIM Calcutta (PGP 2014 - 2016)Documento23 pagineSummer Intern Project Submitted By: Manindra Konda IIM Calcutta (PGP 2014 - 2016)manindra1kondaNessuna valutazione finora
- Datawarehousing FAQDocumento4 pagineDatawarehousing FAQTamil VananNessuna valutazione finora
- Data Analysis With PandasDocumento7 pagineData Analysis With PandasAppalaNaidu YNessuna valutazione finora
- Midsem Regular QPDocumento2 pagineMidsem Regular QPsrirams007Nessuna valutazione finora
- Lenovo PCF StrategyDocumento6 pagineLenovo PCF StrategysantoshkohliNessuna valutazione finora
- NEODBDocumento30 pagineNEODBMichel MüllerNessuna valutazione finora
- A Data Warehouse SumDocumento23 pagineA Data Warehouse SumwanderaNessuna valutazione finora
- MSBIDocumento30 pagineMSBISuresh MupparajuNessuna valutazione finora
- Message Distributed SystemDocumento57 pagineMessage Distributed SystemJagan YallaNessuna valutazione finora
- Cell2Cell Data DocumentationDocumento2 pagineCell2Cell Data DocumentationJayesh PatilNessuna valutazione finora
- BistrmDocumento1.128 pagineBistrmBayu Aji SukmaNessuna valutazione finora
- Writing Effective Use Cases - Alistair CockburnDocumento4 pagineWriting Effective Use Cases - Alistair CockburnjuxuwifyNessuna valutazione finora
- Neo 4 JDocumento16 pagineNeo 4 JsrinivasNessuna valutazione finora
- Exercise Book Level 3 - Update 2023 FULLDocumento62 pagineExercise Book Level 3 - Update 2023 FULLCrazzyguy ForuNessuna valutazione finora
- Quiz 1 DW II SEM 09022017 Ver 3Documento3 pagineQuiz 1 DW II SEM 09022017 Ver 3Smita Srivastava67% (3)
- BDC Call Tran - xd01Documento5 pagineBDC Call Tran - xd01Sanjay PNessuna valutazione finora
- A Machine Learning Approach For Forecasting Hierarchical Time Series PDFDocumento28 pagineA Machine Learning Approach For Forecasting Hierarchical Time Series PDFmehdiNessuna valutazione finora
- Introduction To Big Data PDFDocumento16 pagineIntroduction To Big Data PDFAurelle KTNessuna valutazione finora
- Avoiding The Alignment Trap in ITDocumento9 pagineAvoiding The Alignment Trap in ITSaptarshi RayNessuna valutazione finora
- 3 - Big Data Insight V.2019 PDFDocumento28 pagine3 - Big Data Insight V.2019 PDFInnayah MadaniaNessuna valutazione finora
- Lesson 1 - Hadoop and Big Data OverviewDocumento57 pagineLesson 1 - Hadoop and Big Data OverviewconyeeNessuna valutazione finora
- BPRDocumento34 pagineBPRAndrew WamaeNessuna valutazione finora
- Sarkar, DR Tirthajyoti - Roychowdhury, Shubhadeep - Data Wrangling With Python - Creating Actionable Data From Raw Sources-Packt Publishing (2019)Documento538 pagineSarkar, DR Tirthajyoti - Roychowdhury, Shubhadeep - Data Wrangling With Python - Creating Actionable Data From Raw Sources-Packt Publishing (2019)Việt Anh ĐoànNessuna valutazione finora
- New Challenges in Data Integration: Large Scale Automatic Schema MatchingDocumento8 pagineNew Challenges in Data Integration: Large Scale Automatic Schema MatchingGJESRNessuna valutazione finora
- Mastering Unlabeled Data Meap v06Documento352 pagineMastering Unlabeled Data Meap v06Chetan ChaudhariNessuna valutazione finora
- MDM 104HF3 ConfigurationGuide enDocumento700 pagineMDM 104HF3 ConfigurationGuide enManoj YanalaNessuna valutazione finora
- Analysis PDFDocumento16 pagineAnalysis PDFRachelJosefNessuna valutazione finora
- SPIN-Energy Efficiency & Urban Development PlanningDocumento45 pagineSPIN-Energy Efficiency & Urban Development PlanningEvropski Projekti Savski VenacNessuna valutazione finora
- Assignment Concurrent ProgrammingDocumento7 pagineAssignment Concurrent ProgrammingKien HawNessuna valutazione finora
- User Manual SteadyControlDocumento57 pagineUser Manual SteadyControlrobiny100% (2)
- VMware VSphere Troubleshooting 5.5Documento224 pagineVMware VSphere Troubleshooting 5.5Eugen-Florian NegruNessuna valutazione finora
- Sap BarcodesDocumento59 pagineSap BarcodesDarmin MemiševićNessuna valutazione finora
- Tutorial 9Documento4 pagineTutorial 9fawwazfauzi2004Nessuna valutazione finora
- 3M Scotchkote - Custom Coating GuideDocumento16 pagine3M Scotchkote - Custom Coating GuideUgoRibeiroNessuna valutazione finora
- Profile Measurement Full ReportDocumento16 pagineProfile Measurement Full ReportAman RedhaNessuna valutazione finora
- Comparative Analysis of Wear Rate of Coated Hss Tool and Non-Coated Hss Tool by Using Cr-Zn-NiDocumento21 pagineComparative Analysis of Wear Rate of Coated Hss Tool and Non-Coated Hss Tool by Using Cr-Zn-Nithai avvaiNessuna valutazione finora
- Lowry Hill East Residential Historic DistrictDocumento14 pagineLowry Hill East Residential Historic DistrictWedgeLIVENessuna valutazione finora
- ERPtips SAP Training Manual SAMPLE CHAPTER From Basic PayrollDocumento20 pagineERPtips SAP Training Manual SAMPLE CHAPTER From Basic Payrollravibabu1620Nessuna valutazione finora
- Asme b16.5Documento246 pagineAsme b16.5hugo_siqueira_11Nessuna valutazione finora
- Esna CatalogDocumento12 pagineEsna Catalogbalaji_jayadeva9546Nessuna valutazione finora
- BPO Ricario2Documento2 pagineBPO Ricario2Jalen RossNessuna valutazione finora
- Three-Phase Induction Motor Dynamic Mathematical ModelDocumento3 pagineThree-Phase Induction Motor Dynamic Mathematical Modelsajs201100% (3)
- Session 2A JonkerDocumento15 pagineSession 2A JonkerD_D_ANessuna valutazione finora
- Task 3.a-WordDocumento22 pagineTask 3.a-WordVenkata jahnavi PunatiNessuna valutazione finora
- Identify Challenges in Relationship Development Final AhahhaDocumento2 pagineIdentify Challenges in Relationship Development Final AhahhaKylaNessuna valutazione finora
- TA - 031 - en General Information For Diaphragm SealsDocumento5 pagineTA - 031 - en General Information For Diaphragm Sealstudonghoa tmpNessuna valutazione finora
- Contoh Ringkasan Mengajar Bahasa Inggeris Tahun 2 Dan 3Documento2 pagineContoh Ringkasan Mengajar Bahasa Inggeris Tahun 2 Dan 3Izla MajidNessuna valutazione finora
- 1169a AopDocumento12 pagine1169a AopBAYARD BernardNessuna valutazione finora
- Vatufeku Longman Writing Academic English Xufex PDFDocumento4 pagineVatufeku Longman Writing Academic English Xufex PDFNZAR AREFNessuna valutazione finora
- SB658Documento3 pagineSB658ricardo novoa saraviaNessuna valutazione finora
- About Indian Institute of Technology KanpurDocumento54 pagineAbout Indian Institute of Technology KanpurPooja PundeerNessuna valutazione finora
- Diff BW CBO and RBODocumento2 pagineDiff BW CBO and RBORamreddy BollaNessuna valutazione finora
- Optical Fiber Communication 06EC7 2: Citstudents - inDocumento4 pagineOptical Fiber Communication 06EC7 2: Citstudents - inShailaja UdtewarNessuna valutazione finora
- Oscilloscope Lab Manual11Documento16 pagineOscilloscope Lab Manual11DM RafiunNessuna valutazione finora
- AcaDocumento3 pagineAcasweetunannuNessuna valutazione finora
- ASH ReportDocumento3 pagineASH ReportChandra SekharNessuna valutazione finora
- Assessing The Impact of Premier Information Systems Research OverDocumento20 pagineAssessing The Impact of Premier Information Systems Research OvergasibuteaNessuna valutazione finora
- Calculus Workbook For Dummies with Online PracticeDa EverandCalculus Workbook For Dummies with Online PracticeValutazione: 3.5 su 5 stelle3.5/5 (8)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeDa EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeValutazione: 4 su 5 stelle4/5 (2)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsDa EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsValutazione: 4.5 su 5 stelle4.5/5 (3)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingDa EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingValutazione: 4.5 su 5 stelle4.5/5 (21)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Da EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Nessuna valutazione finora
- Mental Math Secrets - How To Be a Human CalculatorDa EverandMental Math Secrets - How To Be a Human CalculatorValutazione: 5 su 5 stelle5/5 (3)
- Images of Mathematics Viewed Through Number, Algebra, and GeometryDa EverandImages of Mathematics Viewed Through Number, Algebra, and GeometryNessuna valutazione finora
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Da EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Valutazione: 5 su 5 stelle5/5 (1)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsDa EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsValutazione: 3.5 su 5 stelle3.5/5 (9)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormDa EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormValutazione: 5 su 5 stelle5/5 (5)
- A Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathDa EverandA Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathValutazione: 5 su 5 stelle5/5 (1)