Potrebbero piacerti anche
- Darcy's Law - Darcy ExperimentDocumento5 pagineDarcy's Law - Darcy ExperimentImam WijayaNessuna valutazione finora
- VC Notes PDFDocumento98 pagineVC Notes PDFJuan TamadNessuna valutazione finora
- Review of Basic Steps in Derivation of Flow Equations: AuthorDocumento20 pagineReview of Basic Steps in Derivation of Flow Equations: AuthorJai Krishna SahithNessuna valutazione finora
- Darcy's Law - Darcy ExperimentDocumento5 pagineDarcy's Law - Darcy ExperimentImam WijayaNessuna valutazione finora
- What Is Geothermal Energy?Documento2 pagineWhat Is Geothermal Energy?sedisch_2Nessuna valutazione finora
- Level Set Framework, Signed Distance Function, and Various ToolsDocumento1 paginaLevel Set Framework, Signed Distance Function, and Various ToolsImam WijayaNessuna valutazione finora
- PMEDocumento149 paginePMEImam WijayaNessuna valutazione finora
- Leakage CurrentDocumento5 pagineLeakage CurrentImam WijayaNessuna valutazione finora
- Tahapan Eksplorasi GeothermalDocumento9 pagineTahapan Eksplorasi GeothermalImam Wijaya100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
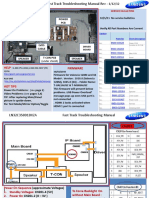
- Samsung LN55C610N1FXZA Fast Track Guide (SM)Documento4 pagineSamsung LN55C610N1FXZA Fast Track Guide (SM)Carlos OdilonNessuna valutazione finora
- Arithmetic Mean PDFDocumento29 pagineArithmetic Mean PDFDivya Gothi100% (1)
- Andre Bazin, The Ontology of The Photographic Image From His Book What Is Cinema Vol. IDocumento8 pagineAndre Bazin, The Ontology of The Photographic Image From His Book What Is Cinema Vol. IAnkit LadiaNessuna valutazione finora
- Hatchery Practice: InternationalDocumento40 pagineHatchery Practice: Internationalabhe prasetyaNessuna valutazione finora
- 3.6 A 40Nm Cmos Highly Linear 0.4-To-6Ghz Receiver Resilient To 0Dbm Out-Of-Band BlockersDocumento3 pagine3.6 A 40Nm Cmos Highly Linear 0.4-To-6Ghz Receiver Resilient To 0Dbm Out-Of-Band Blockershaoyue huangNessuna valutazione finora
- Determining Load Ratios For Technical Rescue Systems and EquipmentDocumento2 pagineDetermining Load Ratios For Technical Rescue Systems and EquipmentAhmad Zubair Rasuly0% (1)
- IRremote Library, Send & Receive Infrared Remote ControlDocumento4 pagineIRremote Library, Send & Receive Infrared Remote ControlJayant SwamiNessuna valutazione finora
- Tle10 Cookery DLL Q1-Week1 Sy2022-2023Documento4 pagineTle10 Cookery DLL Q1-Week1 Sy2022-2023Edmar S AguilarNessuna valutazione finora
- Cultivation and Horticulture of SandalwoodDocumento2 pagineCultivation and Horticulture of SandalwoodAnkitha goriNessuna valutazione finora
- FPA 03-A.01 Permohonan Akreditasi LP LK LI LM PUP PBADocumento595 pagineFPA 03-A.01 Permohonan Akreditasi LP LK LI LM PUP PBAabimanyubawonoNessuna valutazione finora
- Impact of Technology On Our LivesDocumento3 pagineImpact of Technology On Our LivesKim ErandioNessuna valutazione finora
- Doyennés Et Granges de L'abbaye de Cluny (A. Guerreau)Documento45 pagineDoyennés Et Granges de L'abbaye de Cluny (A. Guerreau)theseus11Nessuna valutazione finora
- Glorious Mysteries 1Documento5 pagineGlorious Mysteries 1Vincent safariNessuna valutazione finora
- Helena HelsenDocumento2 pagineHelena HelsenragastrmaNessuna valutazione finora
- Structure of An Atom Revision PaperDocumento5 pagineStructure of An Atom Revision PaperZoe Kim ChinguwaNessuna valutazione finora
- Scan 03-Jan-2020 PDFDocumento2 pagineScan 03-Jan-2020 PDFPavanSharmaNessuna valutazione finora
- Sap Business Objects Edge Series 3.1 Install Windows enDocumento104 pagineSap Business Objects Edge Series 3.1 Install Windows enGerardoNessuna valutazione finora
- Lab 4 SimulationDocumento8 pagineLab 4 SimulationaziziNessuna valutazione finora
- Final Project Part-3 Marketing PlanDocumento8 pagineFinal Project Part-3 Marketing PlanIam TwinStormsNessuna valutazione finora
- List of ErpDocumento2 pagineList of Erpnavyug vidyapeeth trust mahadNessuna valutazione finora
- UW Mathematics Professor Evaluations For Fall 2011Documento241 pagineUW Mathematics Professor Evaluations For Fall 2011DPNessuna valutazione finora
- Altium Designer Training For Schematic Capture and PCB EditingDocumento248 pagineAltium Designer Training For Schematic Capture and PCB EditingAntonio Dx80% (5)
- UntitledDocumento45 pagineUntitledjemNessuna valutazione finora
- TM GUIDE (Basic Competencies)Documento19 pagineTM GUIDE (Basic Competencies)Emelito T. ColentumNessuna valutazione finora
- Pset 2Documento13 paginePset 2rishiko aquinoNessuna valutazione finora
- Blaine Ray HandoutDocumento24 pagineBlaine Ray Handoutaquilesanchez100% (1)
- Combustion FundamentalsDocumento30 pagineCombustion FundamentalsPrem SagarNessuna valutazione finora
- 1 Kane Equations - Example 1Documento8 pagine1 Kane Equations - Example 1Khisbullah HudhaNessuna valutazione finora
- Exercise Chapter 4 This Is How You Do ItDocumento10 pagineExercise Chapter 4 This Is How You Do ItAgustina WidiyantiNessuna valutazione finora
- ns2 LectureDocumento34 paginens2 LecturedhurgadeviNessuna valutazione finora