Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Diap 5 - Diseño de Circuitos Neumaticos PDF
Caricato da
María AlejandraTitolo originale
Copyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Diap 5 - Diseño de Circuitos Neumaticos PDF
Caricato da
María AlejandraCopyright:
Formati disponibili
Syllabus Automatización
TEMA CONTENIDO
Antecedentes históricos, fundamentos de la automatización, automatismo secuencial/discreto, modelo
1 INTRODUCCIÓN AUTOMATIZACIÓN estructural de un sistema automatizado, clasificación tecnológica, lógica cableada, lógica programada, niveles de
automatización
NEUMÁTICA/HIDRÁULICA, FUNDAMENTOS
2 FÍSICOS Y PRODUCCIÓN/TRATAMIENTO DE Ecuación de Bernoulli, presión, fuerza, caudal, velocidad, área, volumen
FLUIDO DE TRABAJO
VÁLVULAS REGULADORAS, DIRECCIONALES Y
3 Tipos principales de válvulas, esquema, uso y método de conexión.
ESPECIALES
ACTUADORES NEUMÁTICOS/HIDRÁULICOS, Tipos principales de cilindros, esquema, uso y método de conexión. Simbología normalizada e Interpretación de
4
SIMBOLOGÍA E INTERPRETACIÓN DE PLANOS planos
DISEÑO INTUITIVO Y SISTEMÁTICO DE Introducción al software FluidSIM-P, Técnicas de solución de problemas de automatización discreta/secuencial.
5
CIRCUITOS NEUMÁTICOS/HIDRÁULICOS Solución de problemas en automatización y calculo de dimensionamiento
Aplicación de señales eléctricas para el control de sistemas hidráulicos o neumáticos. Técnicas de diseño
6 ELECTRO-NEUMÁTICA/HIDRÁULICA
sistemático.
Estructura interna de los controladores lógicos programables. Lenguajes de programación. Solución de problemas
7 INTRODUCCIÓN A LOS PLC Y PROGRAMACIÓN:
de automatización mediante PLC y programación Ladder.
8 INSTRUMENTACIÓN Introducción a sensores. Características dinámicas y estáticas. Clasificación básica. Método de selección.
INTRODUCCIÓN CONTROL CONTINUO DE
Procesos de manufactura continuos en la industria. Sistemas dinámicos lineales y su modelamiento matemático.
9 PROCESOS Y MODELAMIENTO DE SISTEMAS
Simulación de sistemas dinámicos con MatLAB/Octave.
DINÁMICOS
10 CONTROL POR PROCESOS DE REALIMENTACIÓN Sistemas de control por lazos de realimentación. Respuesta de sistemas de lazo cerrado. Estabilidad de sistemas.
SINTONIZACIÓN DE SISTEMAS DE CONTROL
11 Control con realimentación PID, caracterización de respuestas, sintonización de reguladores
CONTINUO
Aplicación de las técnicas de control continuo o discreto/secuencial, en un problema de automatización
12 PROYECTO FINAL DE AUTOMATIZACIÓN
planteado por el profesor
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Diseño de circuitos neumáticos
JULIAN ALFONSO TRISTANCHO ORTIZ
Universidad Distrital
Francisco José de Caldas
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Gobierno de actuadores
Neumáticos
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Gobierno de actuadores Neumáticos
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Gobierno de actuadores Neumáticos
Control manual de accionamiento de cilindros
Cilindro de simple efecto (CSE) Cilindro de doble efecto (CDE)
Neumática (Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Gobierno de actuadores Neumáticos
Control manual de accionamiento de cilindros
Objetivo hacer que un sistema de potencia (cilindro) sea administrado por una
pequeña presión "piloteada". Con el pilotaje es posible hacer que las señales
puedan ser administradas por circuitos especializados independientes
Mando pilotado con retorno Mando pilotado con retorno
por muelle CDE por muelle CDE
Neumática (Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Gobierno de actuadores Neumáticos
Control manual de accionamiento de cilindros
Objetivo hacer que un sistema de potencia (cilindro) sea administrado por una
pequeña presión "piloteada". Con el pilotaje es posible hacer que las señales
puedan ser administradas por circuitos especializados independientes
Mando pilotado con retorno Mando pilotado con retorno
por muelle CDE por muelle CDE
Neumática (Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Gobierno de actuadores Neumáticos
Regulación de velocidad
Regulación de velocidad Regulación de velocidad Regulación en ambos
en salida en entrada sentidos
Neumática (Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Gobierno de actuadores Neumáticos
Mando simultaneo
Mando en serie Mando con válvula de
simultaneidad
Neumática (Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Gobierno de actuadores Neumáticos
Mando desde diferentes puntos
Mando desde dos puntos Mando desde cuatro
puntos
Neumática (Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Gobierno de actuadores Neumáticos
Control de fuerza y mando por presión
Control de fuerza Mando por válvula de
sobrepresión o de secuencia
Neumática (Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Gobierno de actuadores Neumáticos
Control de fuerza y mando por presión
Neumática (Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Gobierno de actuadores Neumáticos
Temporización de señales
12
4 2
60% 3
1
5 3
2 1
1 3
Neumática (Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Diseño circuitos
neumáticos
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Diseño circuitos neumáticos
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Diseño circuitos neumáticos
Fundamentos de neumática(FESTO, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Diseño circuitos neumáticos
Fundamentos de neumática(FESTO, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Diseño circuitos neumáticos
Denominación de los componentes
Número del equipo:
• Empezando con 1
• Sólo se utiliza cuando el circuito de conmutación
completo comprende más de
un equipo
Número circuito:
• 0: Componentes de la alimentación de energía,
accesorios
• 1, 2, ...: Circuito de conmutación de fluidos;
asignación de números por cada cilindro empleando
letras
Marca de componentes:
• Elementos de trabajo A
• Compresores P
• Captadores de señales S
• Válvulas V La numeración se efectúa de izquierda a derecha y
• Otros componentes Z de abajo hacia arriba
Número de componentes Elementos de entrada accionados: señalados por
medio de una leva sombreada
• Comenzando con 1
• Numeración consecutiva para elementos iguales Fundamentos de neumática(FESTO, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Diseño circuitos neumáticos
Representación esquemática de
mecanismos
EJEMPLO: B. Cilindro de
Descripción: Máquina automática de conformado
conformado de chapa delgada.
Operación:
1. El operador deposita la chapa
metálica sobre el molde y oprime un
botón de marcha.
A .Cilindro de acomodación
2. El cilindro de acomodación ubica el
modelo con la chapa en la ubicación
de conformado.
3. Cilindro de conformado baja y
deforma la lamina.
4. El cilindro de acomodación retorna a
C. Cilindro
su posición inicial.
de expulsión
5. El cilindro de expulsión retira la
chapa deformada del molde.
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Diseño circuitos neumáticos
Representación esquemática de
mecanismos
B. Cilindro de
TABLA DE SECUENCIAS DE MOVIMIENTOS conformado
Los movimientos de cada actuador se señalizan
con + si el cilindro esta activado y – si no esta
activado.
A .Cilindro de acomodación
C. Cilindro
de expulsión
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Diseño circuitos neumáticos
Representación esquemática de
mecanismos
B. Cilindro de
DIAGRAMA ESPACIO-FASE: conformado
Muestra el estado de cada uno de los
componentes en función de la fase o tiempo.
A .Cilindro de acomodación
C. Cilindro
de expulsión
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Diseño circuitos neumáticos
Representación esquemática de
mecanismos
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Diseño circuitos neumáticos
GRAFSET – GRÁFica de Control de
Etapas de Transición
Ver simulación FLUIDSIM
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Diseño circuitos neumáticos
ACCIONAMIENTO CONTINUO DE UN CILINDRO
Ver simulación FLUIDSIM
Realizar este circuito
en FluidSIM
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Diseño circuitos neumáticos
SISTEMA DE ACTIVACIÓN DE COMPUERTA
• Realizar este
circuito en FluidSIM
Ver simulación FLUIDSIM
• Incluir un sistema
de control por
atrapamiento.
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Gobierno de actuadores Neumáticos
• Decapado de piezas
El decapado es un tratamiento superficial de
metales que se utiliza para eliminar
impurezas, tales como manchas,
contaminantes inorgánicos, herrumbre o
escoria, de aleaciones de metales ferrosos,
cobre, y aluminio
• Procedimiento
El proceso debe ser realizado de tal manera
que un actuador baje a una baja velocidad
hasta entrar en contacto con el acido de
decapado.
Debe permanecer un tiempo configurable y
retroceder a alta velocidad y con ello
permitir que el operario retire las piezas y
reinicie el sistema. Neumática (Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Gobierno de actuadores Neumáticos
Decapado de piezas
70%
1S2
70%
4 2
Ver simulación FLUIDSIM
1 3
12
2
70% 3
2
1 3 1
1 3
2
1S2
60%
1 3
Neumática (Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Métodos sistemáticos
de diseño
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Métodos sistemáticos de diseño
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Métodos sistemáticos de diseño (Método intuitivo)
2. Cilindro de
conformado
Actuador
Etapa
1A 2A 3A
1 +
2 +
3 -
4 -
Ver simulación FLUIDSIM
5 +
6 -
1 .Cilindro de
acomodación
3. Cilindro
de expulsión
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Métodos sistemáticos de diseño
DEFINICIÓN:
A1 A2
Sistema que garantice que toda señal proveniente
1A
de captores de señales, sean distribuidas de una
forma metódica y eficaz. Impedir interferencias
entre pilotajes.
4 2
Basado en la creación de Grupos de señales que a
una única señal de entrada se presenta una única
señal de salida. 1 V1 1 3
MÉTODOS:
1. Conexión de memorias en cascada: Uso
preferente de Válvulas 4/2 o 5/2
2. Conexión de memorias paso a paso: Uso
preferente de Válvulas 3/2
OBJETIVOS:
•Limitar el uso de microválvulas de ruleta
abatible
•Limitar el uso de temporarizadores
anuladores de señal Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Métodos sistemáticos de diseño
GRUPOS DE SEÑAL NEUMÁTICA:
Agrupación de estados de la secuencia de
funcionamiento de tal manera que un cilindro
TABLA DE ESTADOS
no tenga dos estados diferentes en un mismo Actuador
Etapa
grupo. 1A 2A 3A
1 +
EJEMPLOS: 2 +
-
• 2 Actuadores: 3
4 -
1A+ 2A+ 1A- 2A- (2) 5 +
1A+ 1A- 2A+ 2A- (3) 6 -
• 3 Actuadores:
1A+ 2A+ 3A+ 1A- 2A- 3A- (2) Grupo 1 Grupo 2 Grupo 3
1A+ 2A+ 2A- 1A- 3A+ 3A-
1A+ 1A- 2A+ 2A- 3A+ 3A- (4) 1S2 2S2 2S1 1S1 3S2 3S1
• 4 Actuadores:
1A+ 1A- 2A+ 2A- 4A+ 4A- 3A+ 3C- (5)
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Métodos sistemáticos de diseño
MEMORIA
Una válvula biestable se puede considerar que
tiene capacidad de memoria, pues almacena
(o recuerda) el último estado así se elimine la
presión de aplicación. Solo cambia su estado si
se aplica una señal contraria así sea solamente
de manera instantánea.
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Métodos sistemáticos de diseño
CONEXIÓN DE MEMORIAS EN CASCADA Conexión en cascada de dos grupos
Sistema mas usado descendiente de los
sistemas de control por contactares eléctricos.
• Se emplean válvulas 4/2 o 5/2
• Número de memorias necesarias = Número
de grupos – 1
• Conexiones en cascada de cada uno los
Conexión en cascada de tres grupos
grupos que al ser activados por una señal
Ver simulación FLUIDSIM
garantizan la activación de solo un grupo.
• Cada una de las señales se obtiene de
manera ordenada.
• Siempre el último grupo esta activo al inicio
y al final del ciclo.
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Métodos sistemáticos de diseño
ALIMENTACIÓN DE MEMORIAS EN Conexión en cascada de cuatro
CASCADA grupos, con alimentación de
Se debe garantizar la conexión memorias en serie
secuencial de cada uno de los grupos.
Existen dos métodos para lograr eso:
• Montaje en serie de captores: Menor
número de elementos, limitaciones en
distancia de captores por perdidas de
Ver simulación FLUIDSIM
presión
• Uso de válvulas de simultaneidad
(válvula AND/Y): Mayor número de
componentes pero sin limitaciones
importantes en la distancia de
captores.
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Métodos sistemáticos de diseño
ALIMENTACIÓN DE MEMORIAS EN Conexión en cascada de cuatro grupos,
CASCADA con alimentación de memorias con
Se debe garantizar la conexión válvulas de simultaneidad
secuencial de cada uno de los grupos.
Existen dos métodos para lograr eso:
• Montaje en serie de captores: Menor
número de elementos, limitaciones en
Ver simulación FLUIDSIM
distancia de captores por perdidas de
presión
• Uso de válvulas de simultaneidad
(válvula AND/Y): Mayor número de
componentes pero sin limitaciones
importantes en la distancia de
captores.
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Métodos sistemáticos de diseño
CONEXIÓN DE MEMORIAS PASO A Conexión paso a paso de tres grupos
PASO
Método secundario de diseño
sistemático.
• Se emplean válvulas 3/2
• Número de memorias necesarias =
Número de grupos
Conexión paso a paso de cuatros grupos
• Conexiones en cascada de cada uno
Ver simulación FLUIDSIM
los grupos que al ser activados por
una señal garantizan la activación de
solo un grupo.
• Cada una de las señales se obtiene
de manera ordenada.
• NO ES POSIBLE USARLO PARA DOS
GRUPOS. POR QUE?
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Métodos sistemáticos de diseño
ALIMENTACIÓN DE MEMORIAS PASO A PASO
Ver simulación FLUIDSIM
Conexión paso a paso de
memorias con
alimentación por válvulas
en serie
Conexión paso a paso de
memorias con
alimentación por válvulas
de simultaneidad
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Métodos sistemáticos de diseño
COMPARACIÓN DE MÉTODOS
Conexión en cascada Conexión paso a paso
Método relativamente de incorporación mas
Método tradicional
reciente
Conexión de memorias de
Conexión de memorias de forma independiente
forma dependiente e
y directa
indirecta
Funciona sin problemas en
No funciona para sistemas de 2 grupos
sistemas de 2 grupos
No usar cuando existan
muchos grupos. Máximo 4 o 5 No hay límite superior en el número de grupos
Grupos
Menor número de memorias Mayor número de memorias
Uso necesario de memorias o
Uso de memorias o válvulas 3/2 de menor costo
válvulas 4/2 de mayor costo
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Métodos sistemáticos de diseño
MÉTODO GENÉRICO DE DISEÑO:
1. Análisis del problema y creación de la tabla de estados.
2. Determinar el número de grupos y selección del método sistemático
de diseño de acuerdo a las limitantes de cada método.
3. Conectar cada actuador con una válvula pilotada biestable.
4. Crear la estructura de grupos y válvulas de acuerdo al método
seleccionado (Siempre es igual para el método y número de grupos).
5. Conectar directamente el estado 1 de cada grupo al actuador.
6. Crear la relación de captores para los cambios de grupos (válvulas de
secuenciación).
7. Adicionar los captores necesarios para el cambio de estado de los
actuadores.
8. Verificar cada estado interior de los grupos para asociar la señal de
activación de las válvulas captoras y conectar la entrada a cada grupo
en estudio.
9. Terminar el diseño con las funciones adicionales necesarias.
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Métodos sistemáticos de diseño
EJEMPLO DE APLICACIÓN:
Descripción: Máquina
automática de conformado de 2. Cilindro de
chapa delgada. conformado
Operación:
TABLA DE ESTADOS
1. El operador deposita la Actuador
Etapa
chapa metálica sobre el 1A 2A 3A
molde y oprime un botón de 1 +
marcha. 2 +
2. El cilindro de acomodación 3 -
4 -
ubica el modelo con la
5 +
chapa en la ubicación de 6 -
conformado.
3. Cilindro de conformado baja 1 .Cilindro de Grupo 1 Grupo 2 Grupo 3
y deforma la lamina. acomodación 1A+ 2A+ 2A- 1A- 3A+ 3A-
1S2 2S2 2S1 1S1 3S2 3S1
4. El cilindro de acomodación
retorna a su posición inicial.
3. Cilindro
5. El cilindro de expulsión
de expulsión
retira la chapa deformada
del molde.
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Métodos sistemáticos de diseño
EJEMPLO DE APLICACIÓN: Grupo 1 Grupo 2 Grupo 3
Crear la configuración básica de accionamiento de actuadores 1A+ 2A+ 2A- 1A- 3A+ 3A-
1S2 2S2 2S1 1S1 3S2 3S1
1S1 1S2 2S1 2S2 3S1 3S2
1A 2A 3A
1. Instalar cada actuador con
su válvula de control
4 2 4 2 4 2
piloteada biestable.
1 3 1 3 1 3
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Métodos sistemáticos de diseño
EJEMPLO DE APLICACIÓN: Grupo 1 Grupo 2 Grupo 3
1A+ 2A+ 2A- 1A- 3A+ 3A-
1S1 1S2 2S1 2S2 3S1 3S2
1S2 2S2 2S1 1S1 3S2 3S1
1A 2A 3A
4 2 4 2 4 2
2. Crear la conexión en
1 3 1 3 1 3
cascada asociada para los
grupos necesarios para la
solución del problema.
G1
G2
G3
4 2
2
1 3
4 2
1 3
2
1 3
1 3
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Métodos sistemáticos de diseño
EJEMPLO DE APLICACIÓN: Grupo 1 Grupo 2 Grupo 3
1A+ 2A+ 2A- 1A- 3A+ 3A-
1S1 1S2 2S1 2S2 3S1 3S2
1S2 2S2 2S1 1S1 3S2 3S1
1A 2A 3A
4 2 4 2 4 2
1 3 1 3 1 3 3. Conectar directo a cada
grupo, los actuadores que
están en la posición 1 de
G1
cada grupo.
G2
G3
• 1A con Grupo 1 (Avance)
4 2
• 2A con Grupo 2 (Retroceso)
2
• 3A con Grupo 3 (Retroceso)
1 3
4 2
1 3
2
1 3
2
1 3
1 3
1 3
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Métodos sistemáticos de diseño
EJEMPLO DE APLICACIÓN: Grupo 1 Grupo 2 Grupo 3
1A+ 2A+ 2A- 1A- 3A+ 3A-
1S1 1S2 2S1 2S2 3S1 3S2
1S2 2S2 2S1 1S1 3S2 3S1
1A 2A 3A
4 2 4 2 4 2
1 3 1 3 1 3 4. Asociar la señal que
cambia de grupo con las
válvulas secuenciación.
G1
G2 • 2S2 Cambio Grupo 1 a
G3
Grupo 2
4 2
• 3S2 Cambio Grupo 2 a
2
Grupo 3
• 3S1 Cambio Grupo 3 a
1 3
2S2
4 2
2
1 3
Grupo 1
1 3
3S2 2
1 3 3S1
1 3
1 3
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Métodos sistemáticos de diseño
EJEMPLO DE APLICACIÓN: Grupo 1 Grupo 2 Grupo 3
1A+ 2A+ 2A- 1A- 3A+ 3A-
1S1 1S2 2S1 2S2 3S1 3S2
1S2 2S2 2S1 1S1 3S2 3S1
1A 2A 3A
4 2 4 2 4 2
1 3 1 3 1 3 5. Crear los captores
2 2
2 intermedios necesarios para
1 3 1 3
1 3
cambio de estado de los
G1
actuadores.
G2
G3
4 2
2
1 3
2S2
4 2
1 3
2
1 3
3S2 2
1 3 3S1
1 3
1 3
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Métodos sistemáticos de diseño
EJEMPLO DE APLICACIÓN: Grupo 1 Grupo 2 Grupo 3
1A+ 2A+ 2A- 1A- 3A+ 3A-
1S1 1S2 2S1 2S2 3S1 3S2
1S2 2S2 2S1 1S1 3S2 3S1
1A 2A 3A
4 2 4 2 4 2
1 3 1 3 1 3 6. Revisar grupo a grupo los
2 2
2 estados intermedios para
1S1
2S1
1 3
1S2
1 3
1 3
determinar actuador, estado
G1
y captor asociado. Cada
G2 captor debe ser conectado a
G3
su grupo.
4 2
2
• Grupo 1: Avance 2A
1 3
2S2
4 2
asociado con 1S2.
2
1 3
• Grupo 2: Retroceso 1A
1 3
3S2 2 asociado con 2S1. Avance 3A
asociado con 1S1.
1 3 3S1
1 3
1 3
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Métodos sistemáticos de diseño
EJEMPLO DE APLICACIÓN: Grupo 1 Grupo 2 Grupo 3
Diseño final. 1A+ 2A+ 2A- 1A- 3A+ 3A-
1S2 2S2 2S1 1S1 3S2 3S1
1S1 1S2 2S1 2S2 3S1 3S2
1A 2A 3A
4 2 4 2 4 2
1 3 1 3 1 3 Método Método de Método
intuitivo cascada por pasos
2
2 2
Actuadores 3 3 3
1S1
2S1 1S2
1 3
Válvulas 3/2 6 7 10
1 3 1 3
G1 Válvulas 4/2 3 5 3
G2
Ver simulación FLUIDSIM
G3
4 2
2
1 3
2S2
4 2
1 3
2
1 3
3S2 2
1 3 3S1
1 3
1 3
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Métodos sistemáticos de diseño
EJEMPLO DE APLICACIÓN: Grupo 1 Grupo 2 Grupo 3
Crear la configuración de memorias por cascada (serie) 1A+ 2A+ 2A- 1A- 3A+ 3A-
1S2 2S2 2S1 1S1 3S2 3S1
1S1 1S2 2S1 2S2 3S1 3S2
1A 2A 3A
4 2 4 2 4 2
1 3 1 3 1 3
2
2 2
1S1
2S1 1S2
1 3
1 3 1 3
G1
Ver simulación FLUIDSIM
G2
G3
2 2 2
1 3 1 3 1 3
3S1 2 2
1 3 2S2 3S2 Método Método de Método
1 3 1 3 intuitivo cascada por pasos
2
Actuadores 3 3 3
Válvulas 3/2 6 7 10
1 3
Válvulas 4/2 3 5 3
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Métodos sistemáticos de diseño
EJEMPLO DE APLICACIÓN: Grupo 1 Grupo 2 Grupo 3
Crear la configuración de memorias por cascada (serie) 1A+ 2A+ 2A- 1A- 3A+ 3A-
1S2 2S2 2S1 1S1 3S2 3S1
1S1 1S2 2S1 2S2 3S1 3S2
1A 2A 3A
4 2 4 2 4 2
1 3 1 3 1 3
2
2 2
1S1
2S1 1S2
1 3
1 3 1 3
G1
Ver simulación FLUIDSIM
G2
G3
2 2 2
1 3 1 3 1 3
3S1 2 2
1 3 2S2 3S2 Método Método de Método
1 3 1 3 intuitivo cascada por pasos
2
Actuadores 3 3 3
Válvulas 3/2 6 7 10
1 3
Válvulas 4/2 3 5 3
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Ejercicio Método Sistemático de
Diseño
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Ejercicio Método Sistemático de Diseño
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Ejercicio Método Sistemático de Diseño
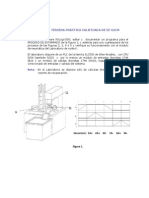
CURVADORA DE TUBOS DE COBRE
Un brazo curvado (1) con eje central (2), donde se monta la matriz de conformado
(3) con el radio que quiere darse a la curvatura del tubo; esta matriz circular
permite que se aloje el tubo (6). El proceso consiste en cerrar el cilindro A sobre
el tubo (acción de agarre o apriete), luego el cilindro B asegura el tubo. El
actuador rotativo C gira el ángulo configurado a baja velocidad. El proceso final
consiste en soltar el tubo del agarre principal (Actuador A), luego del actuador
secundario (B). Luego debe esperar 20 seg para ser retirado el tubo
manualmente, el actuador rotativo debe retornar a su posición inicial.
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Ejercicio Método Sistemático de Diseño
CURVADORA DE TUBOS DE COBRE
1. Análisis del problema y determinación de la tabla de
Actuador
estados. Etapa
1A 2A 3A
2. Determinación del número de grupos y selección del 1 +
método sistemático de diseño de acuerdo a las 2 +
3 +
limitantes de cada método.
4 -
MÉTODO DE CASCADA 5 -
6 -
Grupo 1 Grupo 2
1A+ 2A+ 3A+ 1A- 2A- 3A-
1S2 2S2 3S2 1S1 2S1 3S1
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Ejercicio Método Sistemático de Diseño
CURVADORA DE TUBOS DE COBRE 1S1 1S2 2S1 2S2
3S1
3S2
1A 2A 3A
3. Dibujo de cada uno de los
actuadores con su válvula de
actuación pilotada biestable. 4 2
4 2 4 2
5 3
5 3 5 3
1
1 1
Grupo 1 Grupo 2
1A+ 2A+ 3A+ 1A- 2A- 3A-
1S2 2S2 3S2 1S1 2S1 3S1
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Ejercicio Método Sistemático de Diseño
CURVADORA DE TUBOS DE COBRE 1S1 1S2 2S1 2S2
4. Dibujo de la estructura de
3S1
3S2
1A 2A 3A
grupos y válvulas de acuerdo al
método seleccionado (Siempre
4 2
es igual para el método y 4 2 4 2
número de grupos). 5
1
3
5 3 5 3
1 1
G1
G2
4 2
2
5 3 2
1
Grupo 1 Grupo 2 S2 1 3
S1 1 3
1A+ 2A+ 3A+ 1A- 2A- 3A-
1S2 2S2 3S2 1S1 2S1 3S1
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Ejercicio Método Sistemático de Diseño
CURVADORA DE TUBOS DE COBRE 1S1 1S2 2S1 2S2
3S1
3S2
5. Conectar directamente el 1A 2A 3A
estado 1 de cada grupo al
actuador 4 2
4 2 4 2
5 3
5 3 5 3
1
1 1
G1
G2
4 2
2
5 3 2
1
Grupo 1 Grupo 2 S2 1 3
S1 1 3
1A+ 2A+ 3A+ 1A- 2A- 3A-
1S2 2S2 3S2 1S1 2S1 3S1
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Ejercicio Método Sistemático de Diseño
CURVADORA DE TUBOS DE COBRE
1S1 1S2 2S1 2S2
6. Crear la relación de captores
3S1
3S2
1A 2A 3A
para los cambios de grupos
(válvulas de secuenciación)
4 2
4 2 4 2
5 3
5 3 5 3
1
1 1
G1
G2
4 2
2
5 3 2
3S2 1
Grupo 1 Grupo 2 S2 1 3
3S1
S1 1 3
1A+ 2A+ 3A+ 1A- 2A- 3A-
1S2 2S2 3S2 1S1 2S1 3S1
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Ejercicio Método Sistemático de Diseño
CURVADORA DE TUBOS DE COBRE
7. Adicionar los captores 1S1 1S2 2S1 2S2
3S1
3S2
adicionales necesarios para el 1A 2A
3A
cambio de estado de los
actuadores. 4 2
4 2
4 2
5 3
5 3
5 3 1
1
1
2 2 2 2
1 3 1 3 1 3 1 3
G1
G2
4 2
2
5 3 2
3S2 1
3S1
S2 1 3
Grupo 1 Grupo 2 S1 1 3
1A+ 2A+ 3A+ 1A- 2A- 3A-
1S2 2S2 3S2 1S1 2S1 3S1
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Ejercicio Método Sistemático de Diseño
CURVADORA DE TUBOS DE COBRE
8. Verificar cada estado interior 1S1 1S2 2S1 2S2
3S1
3S2
3A
de los grupos para asociar la 1A 2A
señal de activación de las
válvulas captoras y conectar la 4 2
4 2
4 2
entrada a cada grupo en 5 3
5 3
5
1
3
estudio.
1
1
2 2 2 2
1S2 1S1 2S2 2S1
1 3 1 3 1 3 1 3
G1
G2
4 2
2
5 3 2
3S2 1
3S1
S2 1 3
S1 1 3
Grupo 1 Grupo 2
1A+ 2A+ 3A+ 1A- 2A- 3A-
1S2 2S2 3S2 1S1 2S1 3S1
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Ejercicio Método Sistemático de Diseño
CURVADORA DE TUBOS DE COBRE
9. Terminar el diseño con las
funciones adicionales 1S1 1S2 2S1 2S2
3S1
3S2
3A
necesarias. 1A 2A
40%
Ver simulación FLUIDSIM
4 2
4 2
4 2
5 3
5 3
5 3 1
1 2
1
12
2 2 2
1S2 1S1 2S2
20% 3
1 3 1 3 1 3 1
2
G1
2S1
1 3
G2
4 2
2
5 3 2
Grupo 1 Grupo 2 3S2 1
3S1
1A+ 2A+ 3A+ 1A- 2A- 3A- S2 1 3
S1 1 3
1S2 2S2 3S2 1S1 2S1 3S1
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Métodos sistemáticos de diseño
EJERCICIO EN CLASE:
Realizar los siguientes diseños de montaje, por cualquiera de los dos métodos (Cascada o
Paso a Paso).
1. Secuencia:
1A+ 1A- 2A+ 2A-
Captores
1S2 1S1 2S2 2S1
Secuencia:
1A+ 1A- 2A+ 2A- 3A+ 3A-
Captores
1S2 1S1 2S2 2S1 3S2 3S1
2. Secuencia:
1A+ 2A+ 2A- 1A-
Captores
1S2 2S2 2S1 1S1
Secuencia:
1A+ 2A+ 2A- 1A- 3A+ 3A- 4A+ 4A-
Captores
1S2 2S2 2S1 1S1 3S2 3S1 4S2 4S1
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Métodos sistemáticos de diseño
EJERCICIO EN CLASE:
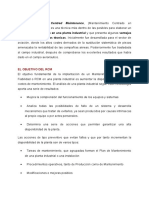
Una línea transportadora salva una altura con el montaje de la figura. El cilindro (B) sujeta las
cajas que vienen por la cinta 1 cuando el (C) está elevado. A continuación el (D) impulsa las
cajas a la cinta 2. Se debe hacer de forma continua.
Neumática(Serrano, 1999)
J. A. Tristancho, UNIVERSIDAD DISTRITAL BOGOTÁ Automatización
Potrebbero piacerti anche
- Ejercicios Programación Lineal - Metodo Gráfico y GusekDocumento3 pagineEjercicios Programación Lineal - Metodo Gráfico y GusekDaniel GutierrezNessuna valutazione finora
- PLCDocumento5 paginePLCkrlossnNessuna valutazione finora
- Termo I IUPSM 1er Corte 20% 2021-2Documento5 pagineTermo I IUPSM 1er Corte 20% 2021-2jean carlosNessuna valutazione finora
- Act Apren3 JHLDocumento9 pagineAct Apren3 JHLJESSICA HURTADO LOZANONessuna valutazione finora
- SUERO COSTEÑO Proyecto BumDocumento15 pagineSUERO COSTEÑO Proyecto BumGladys DaguerNessuna valutazione finora
- Reglamento PGEISPDMDocumento8 pagineReglamento PGEISPDMRuddy Ral100% (1)
- Actividad Matriz de GananciaDocumento7 pagineActividad Matriz de GananciaErika SanchezNessuna valutazione finora
- Capitulo 6Documento6 pagineCapitulo 6elmauri123Nessuna valutazione finora
- Aplicación Método RULADocumento11 pagineAplicación Método RULAKevin DiazNessuna valutazione finora
- Diseño de Estrategias Motivacionales para Un Caso de Su OrganizaciónDocumento9 pagineDiseño de Estrategias Motivacionales para Un Caso de Su OrganizaciónMOISES ANTONIO ALTAMIRANO NU�ONessuna valutazione finora
- Ensayo IODocumento3 pagineEnsayo IOVictor Gustavo Ortiz Del AngelNessuna valutazione finora
- TermodinamicaDocumento6 pagineTermodinamicajair ibarraNessuna valutazione finora
- Tarea 2 Ex-3Documento3 pagineTarea 2 Ex-3manuchau2013123Nessuna valutazione finora
- Vicesa DFPDocumento1 paginaVicesa DFPAdrian LeivaNessuna valutazione finora
- Intercambiadores de Calor ResumenDocumento6 pagineIntercambiadores de Calor ResumenChemicalProgrammerNessuna valutazione finora
- Diagramas, Función, Simbología, Ejemplo y DefiniciónDocumento12 pagineDiagramas, Función, Simbología, Ejemplo y DefiniciónAmairami MarquezNessuna valutazione finora
- Informe Gira Tecnica UNL 2018 Ingenieria en SistemasDocumento44 pagineInforme Gira Tecnica UNL 2018 Ingenieria en SistemasreNessuna valutazione finora
- Tipos de Procesos en Las Organizaciones ProductivasDocumento10 pagineTipos de Procesos en Las Organizaciones ProductivasPiter NcNessuna valutazione finora
- Sistemas de Fabricación FlexibleDocumento8 pagineSistemas de Fabricación Flexiblejuan carlos vargas calderonNessuna valutazione finora
- Iso 37500Documento1 paginaIso 37500Oscar Fernando Guzman QuinteroNessuna valutazione finora
- Matriz Analisis FodaDocumento2 pagineMatriz Analisis FodaLili CabcaNessuna valutazione finora
- Técnicas de ControlDocumento10 pagineTécnicas de Controlingsepulveda30Nessuna valutazione finora
- POO - Fila C Universidad Cesar VallejoDocumento7 paginePOO - Fila C Universidad Cesar VallejojhonNessuna valutazione finora
- Iii Actividad de Aprendizaje 3Documento3 pagineIii Actividad de Aprendizaje 3Claudio Cruz RodríguezNessuna valutazione finora
- Fundamentos Del Sistema de Gestión de La Seguridad y Salud en El TrabajoDocumento4 pagineFundamentos Del Sistema de Gestión de La Seguridad y Salud en El TrabajoBeatriz Santamaria CarrilloNessuna valutazione finora
- Pasos para El Establecimiento Del Plan Mantenimiento PlanificadoDocumento14 paginePasos para El Establecimiento Del Plan Mantenimiento PlanificadoLuis jopiNessuna valutazione finora
- Capítulo 3 PLANEACIÓNDocumento9 pagineCapítulo 3 PLANEACIÓNBryan HerediaNessuna valutazione finora
- Modernizacion Del ProcesoDocumento37 pagineModernizacion Del Procesojuan carlos delgado barretoNessuna valutazione finora
- Herramientas Administrativas de MantenimientosDocumento6 pagineHerramientas Administrativas de MantenimientosPeku Ras Kuko100% (1)
- Xpo Refri Aspectos Tecnologicos de La Congelacion de AlimentosDocumento11 pagineXpo Refri Aspectos Tecnologicos de La Congelacion de AlimentosPeleg Moreno CastilloNessuna valutazione finora
- Física - General - (PG - 577 578) PDFDocumento2 pagineFísica - General - (PG - 577 578) PDFraquelopez123Nessuna valutazione finora
- Elaboracion de Platos Desechables A Partir de La Estopa Del CocoDocumento10 pagineElaboracion de Platos Desechables A Partir de La Estopa Del Cocowilson castillo100% (1)
- Metodo RaveorDocumento14 pagineMetodo RaveorErik EscorciaNessuna valutazione finora
- Marco Legal DomóticaDocumento8 pagineMarco Legal DomóticaNIXON MEDINANessuna valutazione finora
- Control Estadístico de Procesos - David - 01Documento179 pagineControl Estadístico de Procesos - David - 01Andres Sanga TitoNessuna valutazione finora
- Programa - Analitico - Mecanica de Fluidos II G 1Documento2 paginePrograma - Analitico - Mecanica de Fluidos II G 1Julio Andrés Campos VásquezNessuna valutazione finora
- Instruccion TODDocumento3 pagineInstruccion TODjubidiai0% (1)
- Manual de Funciones AaDocumento13 pagineManual de Funciones AaSpringtrap FnafhsNessuna valutazione finora
- Cuadro Comparativo Unidad 1 - COSTOS EMPRESARIALESDocumento2 pagineCuadro Comparativo Unidad 1 - COSTOS EMPRESARIALESKenia Lizbeth Gallegos MartinezNessuna valutazione finora
- Aplicaciones de La Transformada de Laplace en La Ingeneria QuimicaDocumento4 pagineAplicaciones de La Transformada de Laplace en La Ingeneria QuimicabrankoNessuna valutazione finora
- Resumen Introducción Procesos de ManufacturaDocumento11 pagineResumen Introducción Procesos de ManufacturaJorge Luis Hernandez VNessuna valutazione finora
- Bomba de Vacio Lo de La Exposicion para YulianaDocumento9 pagineBomba de Vacio Lo de La Exposicion para Yulianatatiana castilloNessuna valutazione finora
- Sesion 12. Trans Calor Mecanismos Simultaneos TransDocumento13 pagineSesion 12. Trans Calor Mecanismos Simultaneos Transalemao cutyNessuna valutazione finora
- Planos TecnicosDocumento43 paginePlanos TecnicosolimpiaNessuna valutazione finora
- KardexDocumento31 pagineKardexAlexis SebasNessuna valutazione finora
- Deber de TurbomaquinariaDocumento49 pagineDeber de TurbomaquinariaMaikol Daniel PeruchoNessuna valutazione finora
- Comparador OpticoDocumento8 pagineComparador OpticoGuadalupe ValenciaNessuna valutazione finora
- RCM TeoriaDocumento21 pagineRCM TeoriaaleagusalexanderNessuna valutazione finora
- Act Apren3 YTJVDocumento6 pagineAct Apren3 YTJVJESSICA HURTADO LOZANONessuna valutazione finora
- Tarea C4 01Documento2 pagineTarea C4 01Felipe MosNessuna valutazione finora
- Prob. MaterialesDocumento21 pagineProb. Materialeskaneki kenNessuna valutazione finora
- Actividad de Aprendizaje 4.1. Fucniones 1Documento19 pagineActividad de Aprendizaje 4.1. Fucniones 1Mary Taty PallascoNessuna valutazione finora
- Maquinas y Herramientas en Procesos de ManufacturaDocumento13 pagineMaquinas y Herramientas en Procesos de ManufacturaHernan BarretoNessuna valutazione finora
- Practica EtilenglicolDocumento7 paginePractica Etilenglicolpablo Recio Avendaño100% (1)
- Definición de Tasa Interna de Retorno TirDocumento12 pagineDefinición de Tasa Interna de Retorno Tirwilliam gutierrezNessuna valutazione finora
- Tecnicas para Mejorar La CalidadDocumento59 pagineTecnicas para Mejorar La CalidadIsaias SalasNessuna valutazione finora
- Unidad #1 Presentacion Sistemas de Control 2023Documento56 pagineUnidad #1 Presentacion Sistemas de Control 2023juancruz.nova123Nessuna valutazione finora
- Practica Simulador (32h)Documento32 paginePractica Simulador (32h)Daniel MedinaNessuna valutazione finora
- Juan Malqui 6585 - Módulo de La Transmisión AutomáticaDocumento11 pagineJuan Malqui 6585 - Módulo de La Transmisión AutomáticaJuan Carlos MalquiNessuna valutazione finora
- 3.-Criterios de Gestion de AlmacenDocumento56 pagine3.-Criterios de Gestion de AlmacenKOBRINJA100% (2)
- Column AsDocumento1 paginaColumn AsFederico Omar Vilca CordovaNessuna valutazione finora
- Lipidos Quimica Organica 2Documento65 pagineLipidos Quimica Organica 2Maicol Gonzalez71% (7)
- Trabajo Final Introducción A La Ingeniería MecánicaDocumento59 pagineTrabajo Final Introducción A La Ingeniería MecánicaJairo Enrique Caballero GuzmanNessuna valutazione finora
- Clase 10Documento13 pagineClase 10Ross CastagneNessuna valutazione finora
- Propiedades de Las SeccionesDocumento4 paginePropiedades de Las SeccionesJeanNessuna valutazione finora
- Tricalc Práctica 7 Definición de Losas de Cimentación y Vigas FlotantesDocumento7 pagineTricalc Práctica 7 Definición de Losas de Cimentación y Vigas FlotantesAntonio Herrera PérezNessuna valutazione finora
- Practica 3Documento7 paginePractica 3Santiago Ayabaca LandiNessuna valutazione finora
- Policia Cientifica - Revenido Quimico - Gaston BouillonDocumento9 paginePolicia Cientifica - Revenido Quimico - Gaston BouillonMari Tolentino ZNessuna valutazione finora
- Escala Valorativa 4Documento2 pagineEscala Valorativa 4ANTONIO MANFREDI FERNANDEZ FIGUEROANessuna valutazione finora
- Practica de Distribuciones de Probabilidad-AgronomiaDocumento6 paginePractica de Distribuciones de Probabilidad-AgronomiayenderNessuna valutazione finora
- Intro A La Fisica EjerciciosDocumento4 pagineIntro A La Fisica EjerciciosFernanda CastroNessuna valutazione finora
- Equipo 2 Practica 3Documento9 pagineEquipo 2 Practica 3Adrian Alberto Delgado GalvanNessuna valutazione finora
- Modelo Atomico de BohrDocumento33 pagineModelo Atomico de BohrLorena Herrera Hernandez0% (1)
- Equipos para La Mineria SubterraneaDocumento17 pagineEquipos para La Mineria SubterraneaFabricio Agüero Marcelo100% (1)
- ManttoDocumento115 pagineManttoKatherinne SutizalNessuna valutazione finora
- Laboratorio 2 MicrobiologíaDocumento15 pagineLaboratorio 2 MicrobiologíaAlexis Puente BurgaNessuna valutazione finora
- 12Documento18 pagine12LucíaNessuna valutazione finora
- Monografia en FisicaDocumento6 pagineMonografia en FisicaDickNessuna valutazione finora
- Ciencias Naturales 8 PDFDocumento41 pagineCiencias Naturales 8 PDFAmabilis Sequera Galindez0% (1)
- Cap16 Diseño Por Fuerza CortanteDocumento62 pagineCap16 Diseño Por Fuerza CortanteSthefanny Reyes GomezNessuna valutazione finora
- Fase 1 - Conocimientos PreviosDocumento6 pagineFase 1 - Conocimientos PreviosLedherzon ContrerasNessuna valutazione finora
- Practica 1Documento14 paginePractica 1Arizbeth PachecoNessuna valutazione finora
- Practica de Laboratorio #1Documento9 paginePractica de Laboratorio #1Laura DsbNessuna valutazione finora
- Banco de Preguntas PDFDocumento14 pagineBanco de Preguntas PDFJonathanPicoNessuna valutazione finora
- Equilibrioenel PlanoDocumento4 pagineEquilibrioenel Planodeapioth50% (2)
- PROYECTOoficialDocumento24 paginePROYECTOoficialErika Mamani100% (1)
- Primer Dia 6to y 5to - 085446Documento3 paginePrimer Dia 6to y 5to - 085446vmambrin1Nessuna valutazione finora
- Márquez DJM PDFDocumento114 pagineMárquez DJM PDFSheydi Córdova GarcíaNessuna valutazione finora