Potrebbero piacerti anche
- A Complete Introduction to Mountain Biking: Survival FitnessDa EverandA Complete Introduction to Mountain Biking: Survival FitnessNessuna valutazione finora
- Handbook of Practical Gear Design (Mechanical Engineering Series)Documento3 pagineHandbook of Practical Gear Design (Mechanical Engineering Series)Kefli KhooNessuna valutazione finora
- Assembly of Mechanical Components: Prepared by Approved byDocumento33 pagineAssembly of Mechanical Components: Prepared by Approved bySadashiva sahooNessuna valutazione finora
- Spur Gear - : Spur Gears or Straight-Cut Gears Are The Simplest TypeDocumento5 pagineSpur Gear - : Spur Gears or Straight-Cut Gears Are The Simplest TyperaviNessuna valutazione finora
- Chapter 3: Power Transmission: Djj6153 Mechanical Components & MaintenanceDocumento76 pagineChapter 3: Power Transmission: Djj6153 Mechanical Components & MaintenanceAfiq FahmiNessuna valutazione finora
- Kinematics of GearsDocumento4 pagineKinematics of GearsSABEASNNessuna valutazione finora
- Chapter 2-Gear SystemDocumento26 pagineChapter 2-Gear SystemNui Yuhu KuwNessuna valutazione finora
- Document 2 TDe9 12082018Documento8 pagineDocument 2 TDe9 12082018RoshanNessuna valutazione finora
- Gear EnggDocumento109 pagineGear EnggPratyansh AcharyaNessuna valutazione finora
- Gear MechanismsDocumento4 pagineGear MechanismsNaftali OmuhandeNessuna valutazione finora
- GEARSDocumento23 pagineGEARSranjith747483Nessuna valutazione finora
- 4.0 Gears: Introduction: The Slip and Creep in The Belt or Rope Drives Is A Common Phenomenon, in TheDocumento50 pagine4.0 Gears: Introduction: The Slip and Creep in The Belt or Rope Drives Is A Common Phenomenon, in TheSham SundarNessuna valutazione finora
- Design, Modelling and Structural Analysis of Helical Gear For Ceramic and Steel Material by Using ANSYSDocumento5 pagineDesign, Modelling and Structural Analysis of Helical Gear For Ceramic and Steel Material by Using ANSYSyair Enrique Romero OspinoNessuna valutazione finora
- Bda20303 Chapter 1-Gear SystemDocumento27 pagineBda20303 Chapter 1-Gear SystemWan SamiraNessuna valutazione finora
- Gyroscopic Effect (Theory of Machines E-Note 10122015 030631AM)Documento18 pagineGyroscopic Effect (Theory of Machines E-Note 10122015 030631AM)Vasudev GuptaNessuna valutazione finora
- GearDocumento14 pagineGearstarNessuna valutazione finora
- Type of GearsDocumento6 pagineType of Gearskamalezwan100% (1)
- CH 08Documento77 pagineCH 08abdallah ghannamNessuna valutazione finora
- Gear BoxDocumento60 pagineGear Boxkgupta27100% (2)
- Gears: Rolling Contact: The Members That Having Rolling Contact Can Be Used To TransmitDocumento51 pagineGears: Rolling Contact: The Members That Having Rolling Contact Can Be Used To Transmittech officeNessuna valutazione finora
- Training ReportDocumento34 pagineTraining ReportVarun AggarwalNessuna valutazione finora
- Types of Gear (19 RAFIA)Documento10 pagineTypes of Gear (19 RAFIA)RafiaNessuna valutazione finora
- Ijirt154739 Paper PDFDocumento4 pagineIjirt154739 Paper PDFAnuka VarshaNessuna valutazione finora
- Thesis ReportDocumento72 pagineThesis ReportMayur ShetNessuna valutazione finora
- Types of GearDocumento6 pagineTypes of GearMira EvaNessuna valutazione finora
- Chalk and Talk Presentation On Gear'Documento26 pagineChalk and Talk Presentation On Gear'Darshan HarsoraNessuna valutazione finora
- Power Transmission Gear Types of Gears Nomenclature Applications of Gears Velocity Ratio Gear Trains Example Problems and QuestionsDocumento28 paginePower Transmission Gear Types of Gears Nomenclature Applications of Gears Velocity Ratio Gear Trains Example Problems and QuestionsVaibhav Vithoba NaikNessuna valutazione finora
- Mech Transmissions v1Documento12 pagineMech Transmissions v1Alessio ScarabelliNessuna valutazione finora
- Lecture 09 PDFDocumento35 pagineLecture 09 PDFGabriel IulianNessuna valutazione finora
- Lecture 09 PDFDocumento35 pagineLecture 09 PDFGabriel IulianNessuna valutazione finora
- Types of GearsDocumento5 pagineTypes of GearsKarthikNessuna valutazione finora
- Types of Gears - Definition, Materials, Gear Trains, ApplicationsDocumento15 pagineTypes of Gears - Definition, Materials, Gear Trains, Applicationsshubhradiproy2003Nessuna valutazione finora
- GearsDocumento21 pagineGearsabduallah rabahNessuna valutazione finora
- Bevel Gear PraveenDocumento23 pagineBevel Gear Praveen18WJ1A03F4 Shashank reddyNessuna valutazione finora
- Types of GearsDocumento10 pagineTypes of GearsJohnn DoeNessuna valutazione finora
- 4.0 Gear 4.1 Kinematics of GearsDocumento6 pagine4.0 Gear 4.1 Kinematics of Gearsnabil foadNessuna valutazione finora
- Spur Gear: GearsDocumento6 pagineSpur Gear: GearsJayson cheekNessuna valutazione finora
- Gear Drive, Belt and Chain Drive - Lecture NotesDocumento26 pagineGear Drive, Belt and Chain Drive - Lecture NotesVarun KavvampalliNessuna valutazione finora
- Topic1-Introduction To Gears PDFDocumento55 pagineTopic1-Introduction To Gears PDFimranNessuna valutazione finora
- GearDocumento25 pagineGearamit singhNessuna valutazione finora
- Unidad 2 - Guia 3 GEARSDocumento1 paginaUnidad 2 - Guia 3 GEARSCamilo UrrutiaNessuna valutazione finora
- Parkinson Gear Tester ReportDocumento35 pagineParkinson Gear Tester Reportkirubason100% (3)
- Transmissions: Easa B1.1: Module 6.9Documento28 pagineTransmissions: Easa B1.1: Module 6.9crye shotNessuna valutazione finora
- Kinematic of Machines - Gear 1Documento8 pagineKinematic of Machines - Gear 1Safdar Ali NiaziNessuna valutazione finora
- Comparison With Drive Mechanisms: Cogs, Which Mesh With Another Toothed Part in Order To Transmit TorqueDocumento23 pagineComparison With Drive Mechanisms: Cogs, Which Mesh With Another Toothed Part in Order To Transmit TorqueAshish DeotaleNessuna valutazione finora
- GearsDocumento58 pagineGearsapi-238832008100% (3)
- Type of GearDocumento3 pagineType of GearAshish Kumar JhaNessuna valutazione finora
- Gears Presentation (29.10.15)Documento20 pagineGears Presentation (29.10.15)Jitendra GahalotNessuna valutazione finora
- Gear& Gear Trains PDFDocumento55 pagineGear& Gear Trains PDFSumit SumanNessuna valutazione finora
- Chapter 1-Gear SystemDocumento28 pagineChapter 1-Gear Systemazim100% (1)
- HelicalDocumento1 paginaHelicalvbNessuna valutazione finora
- GearsDocumento20 pagineGearsFarhad Noruzi100% (14)
- Drive Shaft PDFDocumento14 pagineDrive Shaft PDFnamduong368Nessuna valutazione finora
- Gear Measurement and Basic ConceptsDocumento34 pagineGear Measurement and Basic Conceptskajavarun100% (1)
- GEARS Types and UsesDocumento9 pagineGEARS Types and UsesAllia TuboroNessuna valutazione finora
- Double E - Safety ChucksDocumento6 pagineDouble E - Safety ChucksYanci JhoeNessuna valutazione finora
- The Mechanics of Clockwork - Lever Escapements, Cylinder Escapements, Verge Escapements, Shockproof Escapements, and Their Maintenance and RepairDa EverandThe Mechanics of Clockwork - Lever Escapements, Cylinder Escapements, Verge Escapements, Shockproof Escapements, and Their Maintenance and RepairValutazione: 5 su 5 stelle5/5 (1)
- The Perfect Corner 2: A Driver's Step-by-Step Guide to Optimizing Complex Sections Through the Physics of RacingDa EverandThe Perfect Corner 2: A Driver's Step-by-Step Guide to Optimizing Complex Sections Through the Physics of RacingNessuna valutazione finora
- Fast Tracking An FCC RevampDocumento8 pagineFast Tracking An FCC RevampAlessio ScarabelliNessuna valutazione finora
- Maximizing Gas Plant CapacityDocumento6 pagineMaximizing Gas Plant CapacityAlessio ScarabelliNessuna valutazione finora
- Approaching The RevampDocumento6 pagineApproaching The RevampAlessio ScarabelliNessuna valutazione finora
- Crude Unit Startup Consequences of High Liquid LevelDocumento4 pagineCrude Unit Startup Consequences of High Liquid LevelAlessio ScarabelliNessuna valutazione finora
- Correct FCC Tower RevampDocumento8 pagineCorrect FCC Tower RevampAlessio ScarabelliNessuna valutazione finora
- Fluid Dynamics (N.2) : A. Vania, Politecnico Di Milano, Dept. of Mechanical Engineering, Milan, ItalyDocumento12 pagineFluid Dynamics (N.2) : A. Vania, Politecnico Di Milano, Dept. of Mechanical Engineering, Milan, ItalyAlessio ScarabelliNessuna valutazione finora
- Lessons From Three Mile Island Visual Design in A High Stakes EnvironmentDocumento28 pagineLessons From Three Mile Island Visual Design in A High Stakes EnvironmentAlessio ScarabelliNessuna valutazione finora
- Mech Transmissions v1Documento12 pagineMech Transmissions v1Alessio ScarabelliNessuna valutazione finora
- Diesel and VGO RecoveryDocumento4 pagineDiesel and VGO RecoveryAlessio ScarabelliNessuna valutazione finora
- Efficiency Coefficient of Mechanical TransmissionsDocumento4 pagineEfficiency Coefficient of Mechanical TransmissionsAlessio ScarabelliNessuna valutazione finora
- Virtual Work and Power BalanceDocumento5 pagineVirtual Work and Power BalanceAlessio ScarabelliNessuna valutazione finora
- Mass Moment InertiaDocumento7 pagineMass Moment InertiaAlessio ScarabelliNessuna valutazione finora
- Dynamic Analysis of A Point MassDocumento7 pagineDynamic Analysis of A Point MassAlessio ScarabelliNessuna valutazione finora
- Su27 Eng 1Documento103 pagineSu27 Eng 1Alessio ScarabelliNessuna valutazione finora
- Transmissions: A. Vania Politecnico Di Milano, Dept. of Mechanical Engineering, Milan, ItalyDocumento8 pagineTransmissions: A. Vania Politecnico Di Milano, Dept. of Mechanical Engineering, Milan, ItalyAlessio ScarabelliNessuna valutazione finora
- Kinematics v1Documento23 pagineKinematics v1Alessio ScarabelliNessuna valutazione finora
- Joints and Linkages: A. Vania Politecnico Di Milano, Dept. of Mechanical Engineering, Milan, ItalyDocumento10 pagineJoints and Linkages: A. Vania Politecnico Di Milano, Dept. of Mechanical Engineering, Milan, ItalyAlessio ScarabelliNessuna valutazione finora
- Dynamics of A Rigid Body: DM D D DM DFDocumento3 pagineDynamics of A Rigid Body: DM D D DM DFAlessio ScarabelliNessuna valutazione finora
- Articolo PDFDocumento8 pagineArticolo PDFAlessio ScarabelliNessuna valutazione finora
- Induction Motors PPT v1Documento10 pagineInduction Motors PPT v1Alessio ScarabelliNessuna valutazione finora
- Honda V8 F1 EngineDocumento5 pagineHonda V8 F1 EngineAlessio Scarabelli100% (2)
- Using Displacement As Level MeasurementDocumento11 pagineUsing Displacement As Level MeasurementAlessio ScarabelliNessuna valutazione finora
- Fogler Examples IsothermalDocumento36 pagineFogler Examples IsothermalAlessio ScarabelliNessuna valutazione finora
- ICE PPT v1Documento16 pagineICE PPT v1Alessio ScarabelliNessuna valutazione finora
- ICE - Internal Combustion EngineDocumento12 pagineICE - Internal Combustion EngineAlessio ScarabelliNessuna valutazione finora
- Pneumatic Instrumentation AllDocumento29 paginePneumatic Instrumentation AllAlessio ScarabelliNessuna valutazione finora
- Thermocouple 2Documento22 pagineThermocouple 2Alessio Scarabelli100% (1)
- 12 - Materials For Sour Service PDFDocumento50 pagine12 - Materials For Sour Service PDFAlessio Scarabelli67% (3)
- VMP 930 Veterinary Parasitology: Paragonimus KellicottiDocumento63 pagineVMP 930 Veterinary Parasitology: Paragonimus KellicottiRenien Khim BahayaNessuna valutazione finora
- Hazardous Locations: C.E.C. ClassificationsDocumento4 pagineHazardous Locations: C.E.C. ClassificationsThananuwat SuksaroNessuna valutazione finora
- Convection Transfer EquationsDocumento9 pagineConvection Transfer EquationsA.N.M. Mominul Islam MukutNessuna valutazione finora
- 1.SDH Basics PDFDocumento37 pagine1.SDH Basics PDFsafder wahabNessuna valutazione finora
- NABARD R&D Seminar FormatDocumento7 pagineNABARD R&D Seminar FormatAnupam G. RatheeNessuna valutazione finora
- Multimodal Essay FinalDocumento8 pagineMultimodal Essay Finalapi-548929971Nessuna valutazione finora
- Bcci ScandalDocumento6 pagineBcci ScandalNausaf AhmedNessuna valutazione finora
- 1.water, Acids, Bases, Buffer Solutions in BiochemistryDocumento53 pagine1.water, Acids, Bases, Buffer Solutions in BiochemistryÇağlaNessuna valutazione finora
- (Campus of Open Learning) University of Delhi Delhi-110007Documento1 pagina(Campus of Open Learning) University of Delhi Delhi-110007Sahil Singh RanaNessuna valutazione finora
- Focus Edition From GC: Phosphate Bonded Investments For C&B TechniquesDocumento35 pagineFocus Edition From GC: Phosphate Bonded Investments For C&B TechniquesAlexis De Jesus FernandezNessuna valutazione finora
- FE CH 5 AnswerDocumento12 pagineFE CH 5 AnswerAntony ChanNessuna valutazione finora
- BJAS - Volume 5 - Issue Issue 1 Part (2) - Pages 275-281Documento7 pagineBJAS - Volume 5 - Issue Issue 1 Part (2) - Pages 275-281Vengky UtamiNessuna valutazione finora
- Product Manual 26086 (Revision E) : EGCP-2 Engine Generator Control PackageDocumento152 pagineProduct Manual 26086 (Revision E) : EGCP-2 Engine Generator Control PackageErick KurodaNessuna valutazione finora
- Hand Out Fire SurpressDocumento69 pagineHand Out Fire SurpressSeptiawanWandaNessuna valutazione finora
- CORP2165D Lecture 04Documento26 pagineCORP2165D Lecture 04kinzi chesterNessuna valutazione finora
- Acc116 Dec 2022 - Q - Test 1Documento6 pagineAcc116 Dec 2022 - Q - Test 12022825274100% (1)
- Specifications (018-001) : WarningDocumento6 pagineSpecifications (018-001) : WarningRómulo Simón Lizarraga LeónNessuna valutazione finora
- Genomic Tools For Crop ImprovementDocumento41 pagineGenomic Tools For Crop ImprovementNeeru RedhuNessuna valutazione finora
- Lab Report SBK Sem 3 (Priscilla Tuyang)Documento6 pagineLab Report SBK Sem 3 (Priscilla Tuyang)Priscilla Tuyang100% (1)
- COURTESY Reception Good MannersDocumento1 paginaCOURTESY Reception Good MannersGulzina ZhumashevaNessuna valutazione finora
- DS Agile - Enm - C6pDocumento358 pagineDS Agile - Enm - C6pABDERRAHMANE JAFNessuna valutazione finora
- Sankranthi PDFDocumento39 pagineSankranthi PDFMaruthiNessuna valutazione finora
- Gaming Ports MikrotikDocumento6 pagineGaming Ports MikrotikRay OhmsNessuna valutazione finora
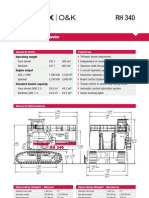
- Hydraulic Mining ExcavatorDocumento8 pagineHydraulic Mining Excavatorasditia_07100% (1)
- UM-140-D00221-07 SeaTrac Developer Guide (Firmware v2.4)Documento154 pagineUM-140-D00221-07 SeaTrac Developer Guide (Firmware v2.4)Antony Jacob AshishNessuna valutazione finora
- Chinese Paper Cutting Work SheetDocumento4 pagineChinese Paper Cutting Work Sheet黃梓Nessuna valutazione finora
- Project Management TY BSC ITDocumento57 pagineProject Management TY BSC ITdarshan130275% (12)
- 385C Waw1-Up PDFDocumento4 pagine385C Waw1-Up PDFJUNA RUSANDI SNessuna valutazione finora
- Native VLAN and Default VLANDocumento6 pagineNative VLAN and Default VLANAaliyah WinkyNessuna valutazione finora
- Iphone and Ipad Development TU GrazDocumento2 pagineIphone and Ipad Development TU GrazMartinNessuna valutazione finora