Potrebbero piacerti anche
- Motion 2000 Hydraulic V9 42-02-1P21 A9Documento294 pagineMotion 2000 Hydraulic V9 42-02-1P21 A9ElputoAmo XDNessuna valutazione finora
- Motion 2000 Hydraulic v8 42-02-1P20 B7Documento248 pagineMotion 2000 Hydraulic v8 42-02-1P20 B7ElputoAmo XD100% (1)
- Motion 4000 Traction v9 42-02-2P25 A6Documento480 pagineMotion 4000 Traction v9 42-02-2P25 A6ElputoAmo XDNessuna valutazione finora
- Installing D3000 Door OperatorDocumento6 pagineInstalling D3000 Door OperatorSyed iliyasNessuna valutazione finora
- VFMC-PTC Series M 42-02-2p22 Rev b9Documento367 pagineVFMC-PTC Series M 42-02-2p22 Rev b9ElputoAmo XDNessuna valutazione finora
- Smartrise Fault Table Troubleshooting Guide PDFDocumento94 pagineSmartrise Fault Table Troubleshooting Guide PDFAhmedNessuna valutazione finora
- VF-3000 Traction User Manual PDFDocumento138 pagineVF-3000 Traction User Manual PDFfreddyjoertyNessuna valutazione finora
- FCU Safescreen: Installation ManualDocumento13 pagineFCU Safescreen: Installation ManualChien liang LiuNessuna valutazione finora
- L1000A Supplement s7017 EZZ022073Documento20 pagineL1000A Supplement s7017 EZZ022073habibulla100% (1)
- Controller With EMIDocumento11 pagineController With EMIMohammed Qaid AlathwaryNessuna valutazione finora
- VVMC-SCR Series M (Asme 2000) (42!02!4022 Rev A1)Documento254 pagineVVMC-SCR Series M (Asme 2000) (42!02!4022 Rev A1)ElputoAmo XDNessuna valutazione finora
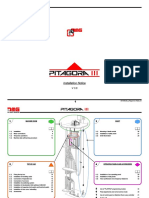
- Eco+ Augusta: Instruction HandbookDocumento48 pagineEco+ Augusta: Instruction HandbookTaimoor AhmedNessuna valutazione finora
- Ultra 2000Documento216 pagineUltra 2000ElputoAmo XDNessuna valutazione finora
- Mce Product Specs All SectionsDocumento186 pagineMce Product Specs All SectionsSunilkumar100% (1)
- MCE IMC-SCRRevE8 42027200E PDFDocumento449 pagineMCE IMC-SCRRevE8 42027200E PDFken100% (1)
- Traction Type ElevatorDocumento472 pagineTraction Type ElevatorMarcial NasiNessuna valutazione finora
- MAG Explorer Instructions TM7304 - R4Documento39 pagineMAG Explorer Instructions TM7304 - R4Robert AguilarNessuna valutazione finora
- Hidra CRONO - EN81-72 AS1735 - 1-2003 - Configuration Guide - enDocumento8 pagineHidra CRONO - EN81-72 AS1735 - 1-2003 - Configuration Guide - engianfrancoNessuna valutazione finora
- Elevator Mechanic: Passbooks Study GuideDa EverandElevator Mechanic: Passbooks Study GuideNessuna valutazione finora
- 7502.9028 Manual Dover DMC I For 32bit Windows Rev11Documento87 pagine7502.9028 Manual Dover DMC I For 32bit Windows Rev11jamesNessuna valutazione finora
- Operador PDFDocumento39 pagineOperador PDFMohammed Hammad100% (1)
- TAC32 1 Op Ptas 6300pa3 y Pa4 Parcial PDFDocumento14 pagineTAC32 1 Op Ptas 6300pa3 y Pa4 Parcial PDFViệt Thảo TrầnNessuna valutazione finora
- QKS16-VF Hxdoor2Documento24 pagineQKS16-VF Hxdoor2Curt NeilsonNessuna valutazione finora
- MPHDocumento148 pagineMPHscariggy100% (1)
- Installation Notice: All Right ReservedDocumento46 pagineInstallation Notice: All Right ReservedPaul CollinsNessuna valutazione finora
- Dover I2i3 ValveDocumento62 pagineDover I2i3 Valveken100% (2)
- IMC - SCR - Rev - E8 (42-02-7200E)Documento449 pagineIMC - SCR - Rev - E8 (42-02-7200E)ElputoAmo XDNessuna valutazione finora
- User Manual. Automatic Horizontal Sliding Car Door. Component: VF7 Relay Electronic Module. V7.01.06-00Documento32 pagineUser Manual. Automatic Horizontal Sliding Car Door. Component: VF7 Relay Electronic Module. V7.01.06-00Adriano FlorencioNessuna valutazione finora
- IMC-MG (42-02-6202 Rev B3)Documento332 pagineIMC-MG (42-02-6202 Rev B3)ElputoAmo XDNessuna valutazione finora
- Lift Control System: ManualDocumento180 pagineLift Control System: ManualAfsar HussainNessuna valutazione finora
- 9 - Overspeed Valve - Written Procedure From Manufacturer - TKE I2 - I3 - ValveDocumento62 pagine9 - Overspeed Valve - Written Procedure From Manufacturer - TKE I2 - I3 - ValveNickNessuna valutazione finora
- QuattroDocumento146 pagineQuattrorusty shacklefordNessuna valutazione finora
- TroubleshootingDocumento34 pagineTroubleshootingEagle MayNessuna valutazione finora
- 078-0183-01B Intro To LonWorks Rev 2Documento98 pagine078-0183-01B Intro To LonWorks Rev 2bradalbiNessuna valutazione finora
- 05-1. Standard IO MapDocumento5 pagine05-1. Standard IO MapБахтияр ЮмачиковNessuna valutazione finora
- 思迈特 零件Documento78 pagine思迈特 零件Jeremy LinNessuna valutazione finora
- 104 Door Control Board PM-SSCDocumento16 pagine104 Door Control Board PM-SSCKevin SilvaNessuna valutazione finora
- Modu-Tool Basic Operating Instructions PDFDocumento2 pagineModu-Tool Basic Operating Instructions PDFAliRouyouNessuna valutazione finora
- HD 98 Door Operator With UitDocumento46 pagineHD 98 Door Operator With UitKerly ZapataNessuna valutazione finora
- ElevatorsDocumento6 pagineElevatorssenthilNessuna valutazione finora
- 100-170 ManualDocumento59 pagine100-170 ManualReza KühnNessuna valutazione finora
- NG Hoistway Door System: 25-AAA23101PDocumento25 pagineNG Hoistway Door System: 25-AAA23101PTolgahan Karadag100% (1)
- Cegard3D Operation Manual en 100713Documento56 pagineCegard3D Operation Manual en 100713bahaNessuna valutazione finora
- Tac 32 ICON 32 ManualDocumento220 pagineTac 32 ICON 32 ManualOnebigunicorn100% (1)
- Schindler 3300 Ca Product Family Brochure PDFDocumento32 pagineSchindler 3300 Ca Product Family Brochure PDFjorge barrerNessuna valutazione finora
- g400 en PDFDocumento13 pagineg400 en PDFReynold SuarezNessuna valutazione finora
- 984-0110FS Full Size - R020212Documento17 pagine984-0110FS Full Size - R020212Anonymous zSpR5jUdNessuna valutazione finora
- DC81091Q00 Program Manual EngDocumento52 pagineDC81091Q00 Program Manual EngJose Vicente Alvarez FernándezNessuna valutazione finora
- PLC Based ElevatorDocumento10 paginePLC Based ElevatorShisir KandelNessuna valutazione finora
- Elevator DrivesDocumento41 pagineElevator DrivesNuraimi Hamid100% (1)
- CPSI - Safe and Efficient Inspection: Core Module Trainer Manual T181 Edition 2012-02Documento13 pagineCPSI - Safe and Efficient Inspection: Core Module Trainer Manual T181 Edition 2012-02Ali DiabNessuna valutazione finora
- Saturn DriveDocumento21 pagineSaturn DrivefreddyjoertyNessuna valutazione finora
- Quick Reference Installation Guide: The Peelle CompanyDocumento62 pagineQuick Reference Installation Guide: The Peelle CompanyRodrigo Antonio100% (1)
- GeN2-Regen-HD Supplement of INSDocumento29 pagineGeN2-Regen-HD Supplement of INSAbubeker JemalNessuna valutazione finora
- H800man PDFDocumento20 pagineH800man PDFgrfm100% (1)
- Elevator Inspector: Passbooks Study GuideDa EverandElevator Inspector: Passbooks Study GuideNessuna valutazione finora
- Am-11.65.029 Kdl32-Mini InstalDocumento69 pagineAm-11.65.029 Kdl32-Mini InstalMike RusheNessuna valutazione finora
- Gen2MR 31173Documento12 pagineGen2MR 31173gtravaNessuna valutazione finora
- Contactors and Relay PartsDocumento42 pagineContactors and Relay Partswayne mcmurrayNessuna valutazione finora
- NICE3000 电梯一体化控制器用户手册 (英文详版) - V1.0 PDFDocumento232 pagineNICE3000 电梯一体化控制器用户手册 (英文详版) - V1.0 PDFAsdrubal Fredy GutierrezNessuna valutazione finora
- "Sound Innovation, On Call": EMS5 Call Director Easy Set-Up InstructionsDocumento19 pagine"Sound Innovation, On Call": EMS5 Call Director Easy Set-Up Instructionswayne mcmurrayNessuna valutazione finora
- Uv-5Atc: (Constant Down Speed Valve) Adjustment ProcedureDocumento2 pagineUv-5Atc: (Constant Down Speed Valve) Adjustment Procedurewayne mcmurrayNessuna valutazione finora
- RM5000EX: Operations ManualDocumento46 pagineRM5000EX: Operations Manualwayne mcmurrayNessuna valutazione finora
- Overspeed Valve (Pipe Rupture / Shut Off Valve) JANUARY 2009Documento3 pagineOverspeed Valve (Pipe Rupture / Shut Off Valve) JANUARY 2009wayne mcmurrayNessuna valutazione finora
- Exterior Dimensions Uc1A - : JANUARY 2009Documento20 pagineExterior Dimensions Uc1A - : JANUARY 2009wayne mcmurrayNessuna valutazione finora
- We-Mb-1959-Ml-027-021 Adj GRLS Brake ApDocumento21 pagineWe-Mb-1959-Ml-027-021 Adj GRLS Brake Apwayne mcmurrayNessuna valutazione finora
- Rescuvator Model5 ManualDocumento11 pagineRescuvator Model5 Manualwayne mcmurrayNessuna valutazione finora
- Recspareparts (42 02 Parts c3Documento72 pagineRecspareparts (42 02 Parts c3wayne mcmurrayNessuna valutazione finora
- Contactors and Relay PartsDocumento42 pagineContactors and Relay Partswayne mcmurrayNessuna valutazione finora
- EC V900-PVFmanv5 Prodigy & Standard Rev7!28!17Documento107 pagineEC V900-PVFmanv5 Prodigy & Standard Rev7!28!17wayne mcmurray100% (2)
- MP Control ManualDocumento36 pagineMP Control Manualwayne mcmurray100% (7)
- Geh 6421volii MK Vi System Guide PDFDocumento556 pagineGeh 6421volii MK Vi System Guide PDFJithin DigibaapNessuna valutazione finora
- Electrics Database QuestionsDocumento9 pagineElectrics Database Questionsoscarr1993Nessuna valutazione finora
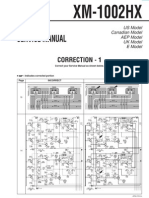
- XM 1002HXDocumento10 pagineXM 1002HXPedro Jose Lirio DiazNessuna valutazione finora
- Electronic Circuits & Applications Course Code: 4321104: Page 1 of 8Documento8 pagineElectronic Circuits & Applications Course Code: 4321104: Page 1 of 8Ashish PatelNessuna valutazione finora
- Eaton AutomationDocumento84 pagineEaton AutomationRadu Fabian FishyNessuna valutazione finora
- Screw Compressor ASY (R-134) Series PDFDocumento52 pagineScrew Compressor ASY (R-134) Series PDFNajam2450% (2)
- Site Inspection and Test Record: 13.8/4.16KV UAT-14 TRAFO RTCC PANELDocumento6 pagineSite Inspection and Test Record: 13.8/4.16KV UAT-14 TRAFO RTCC PANELAshraf MohammedNessuna valutazione finora
- Anexo No.13 Manual de Usuario Transmisor de Nivel Micropilot FMR 10Documento102 pagineAnexo No.13 Manual de Usuario Transmisor de Nivel Micropilot FMR 10Carlos Alberto Castrillon AcevedoNessuna valutazione finora
- Rish CON SI-102 V-MDocumento3 pagineRish CON SI-102 V-MManoj MakholiyaNessuna valutazione finora
- Socomec DIRIS Brochure PDFDocumento6 pagineSocomec DIRIS Brochure PDFNihar RoyNessuna valutazione finora
- 149 Fusionadora OP9280Documento2 pagine149 Fusionadora OP9280Ferdinand FernandezNessuna valutazione finora
- Praxis Mini Guard 008Documento4 paginePraxis Mini Guard 008SandroCezardeAraujo50% (2)
- Understanding The Noise Cut TransformerDocumento8 pagineUnderstanding The Noise Cut TransformerIzah FriendsNessuna valutazione finora
- Fan6604 523271Documento16 pagineFan6604 523271arf faNessuna valutazione finora
- Operation Manual - YX51 Decking - FINAL PDFDocumento16 pagineOperation Manual - YX51 Decking - FINAL PDFAl Haba Ahmad Zaki Abdul HamidNessuna valutazione finora
- Multi-Component FTIR Emission Monitoring System: Abb Measurement & Analytics - Data SheetDocumento16 pagineMulti-Component FTIR Emission Monitoring System: Abb Measurement & Analytics - Data SheetRonaldo JuniorNessuna valutazione finora
- 86356-00 8Documento14 pagine86356-00 8Talha FarooqNessuna valutazione finora
- Acelerometer CTCDocumento7 pagineAcelerometer CTCJose Luis RattiaNessuna valutazione finora
- GRL200 (6F2S1914 G2a) 0.37Documento1.697 pagineGRL200 (6F2S1914 G2a) 0.37Bui PhongNessuna valutazione finora
- ABB Brochure Hydrogen A 2021 LowResDocumento10 pagineABB Brochure Hydrogen A 2021 LowResfassina01Nessuna valutazione finora
- Sigma 7 FT Indexing Manual PDFDocumento267 pagineSigma 7 FT Indexing Manual PDFIchal DafianNessuna valutazione finora
- TOP264VG-Power Integrations PDFDocumento40 pagineTOP264VG-Power Integrations PDFBoKi PoKiNessuna valutazione finora
- ION F18 6 10kVA Install ManualDocumento64 pagineION F18 6 10kVA Install ManualLuis PereiraNessuna valutazione finora
- Pilz Pnoz OverviewDocumento40 paginePilz Pnoz OverviewKushtrim MalaNessuna valutazione finora
- A30 1 PDFDocumento2 pagineA30 1 PDFscribdkhatnNessuna valutazione finora
- DC Power Supply DesignDocumento3 pagineDC Power Supply DesignDai NgoNessuna valutazione finora
- (LA25-NP) Current TransducerDocumento3 pagine(LA25-NP) Current TransducerRicardoNessuna valutazione finora
- GBSS9.0 DBS3900 Product Description V2.1 (20110228)Documento28 pagineGBSS9.0 DBS3900 Product Description V2.1 (20110228)Peyman AllahverdianNessuna valutazione finora
- Pro LH InstructionManualDocumento40 paginePro LH InstructionManualMicanan SystemsNessuna valutazione finora
- Toshiba Wac+05k 12k User+Manual 2021+ (Ing Esp Preview07) + +Bt+ModuleDocumento64 pagineToshiba Wac+05k 12k User+Manual 2021+ (Ing Esp Preview07) + +Bt+ModuleJorgeNessuna valutazione finora