Potrebbero piacerti anche
- Sensors Distance Measurement Using ArduinoDocumento6 pagineSensors Distance Measurement Using Arduinonikna100% (2)
- Ultrasonic SensorDocumento7 pagineUltrasonic SensorCLAS COACHINGNessuna valutazione finora
- Distance Measurement Using Ultrasonic Sensor and ArduinoDocumento2 pagineDistance Measurement Using Ultrasonic Sensor and ArduinoAwais Zulfiqar75% (4)
- Automatic Hand Sanitizer MachineDocumento6 pagineAutomatic Hand Sanitizer MachineBhumika J PawarNessuna valutazione finora
- Speaking System For Mute PeopleDocumento3 pagineSpeaking System For Mute PeopleBitasta BardhanNessuna valutazione finora
- 1.speed Synchronization of Multiple MotorsDocumento89 pagine1.speed Synchronization of Multiple MotorsBhanu TummalapalliNessuna valutazione finora
- Ir Remote Based Stepper Motor Control PDFDocumento70 pagineIr Remote Based Stepper Motor Control PDFsanoopmk100% (1)
- Controlling of AC Lamp Dimmer Through Mobile Phone: FeaturesDocumento2 pagineControlling of AC Lamp Dimmer Through Mobile Phone: FeaturesHari KishorNessuna valutazione finora
- Project Presentation PDFDocumento22 pagineProject Presentation PDFARIF KANONNessuna valutazione finora
- EEE 3210 Final Project ReportDocumento19 pagineEEE 3210 Final Project ReportDerrick ThamNessuna valutazione finora
- Automatic Room Light Controller With Visitor CounterDocumento2 pagineAutomatic Room Light Controller With Visitor CounterdiwakarlpuNessuna valutazione finora
- Design & Construction of A 220V Voltage StabilizerDocumento49 pagineDesign & Construction of A 220V Voltage StabilizerHassan Shahid67% (3)
- Control and Notification Automatic Water Pump With Arduino and SMS GatewayDocumento6 pagineControl and Notification Automatic Water Pump With Arduino and SMS Gatewaylena cpaNessuna valutazione finora
- Final Project Report of LabDocumento7 pagineFinal Project Report of LabDuniya ANessuna valutazione finora
- BuzzerDocumento6 pagineBuzzerpunna pushpakNessuna valutazione finora
- Human Robot InteractionDocumento30 pagineHuman Robot InteractionUmasree A K100% (1)
- Home Automation System Using ArduinoDocumento5 pagineHome Automation System Using ArduinoKayeNessuna valutazione finora
- Iotbased HomeautomationDocumento13 pagineIotbased HomeautomationFahad aliNessuna valutazione finora
- Voice Controlled RobotDocumento62 pagineVoice Controlled RobotSami Zama100% (1)
- Burglar Alarm Using Arduino and PIR SensorDocumento7 pagineBurglar Alarm Using Arduino and PIR SensorShahrim MohdNessuna valutazione finora
- IoT Based Robot ArmDocumento39 pagineIoT Based Robot ArmJayashree R100% (1)
- On "GSM BASED E-NOTICE BOARD"Documento28 pagineOn "GSM BASED E-NOTICE BOARD"Rahul Garg75% (4)
- Catalogue 2Documento30 pagineCatalogue 2Radhakrishna YenuguNessuna valutazione finora
- Live Human Being Detection Wireless Remote Controlled RobotDocumento59 pagineLive Human Being Detection Wireless Remote Controlled RobotAnand Cool90% (10)
- Alarm System For Medicine Reminder Based On MicrocontrollerDocumento4 pagineAlarm System For Medicine Reminder Based On MicrocontrollerEditor IJTSRD100% (1)
- Wireless Mobile ChargerDocumento33 pagineWireless Mobile ChargerAditya MahajanNessuna valutazione finora
- Automatic Visitor Counter and Light SwitchingDocumento57 pagineAutomatic Visitor Counter and Light SwitchingLea Jean ConsigoNessuna valutazione finora
- Project ReportDocumento7 pagineProject ReportAnkit SinghalNessuna valutazione finora
- ESP32 CAM Based Surveillance Robot Using Arduino IDEDocumento52 pagineESP32 CAM Based Surveillance Robot Using Arduino IDEjulio hdtNessuna valutazione finora
- BB GRP Smart BinDocumento32 pagineBB GRP Smart Binsalina khanNessuna valutazione finora
- Digital Clock With Visitor CounterDocumento52 pagineDigital Clock With Visitor Countermuddassir07100% (1)
- Intelligent Industrial Security Surveillance System With Auto SmsDocumento3 pagineIntelligent Industrial Security Surveillance System With Auto SmsMamatha MarriNessuna valutazione finora
- Obstacle Avoiding RobotDocumento17 pagineObstacle Avoiding RobotSmiley Boy Aanand100% (1)
- Distance Measurement Using Ultrasonic Sensor and ArduinoDocumento4 pagineDistance Measurement Using Ultrasonic Sensor and ArduinoAR LAPNessuna valutazione finora
- Water Level Indicator Based On IOTDocumento24 pagineWater Level Indicator Based On IOTmuskan sharmaNessuna valutazione finora
- IoT Based Smart Energy Metering With Blynk ApplicationDocumento6 pagineIoT Based Smart Energy Metering With Blynk ApplicationEditor IJTSRDNessuna valutazione finora
- Over Under Voltage ProtectionDocumento49 pagineOver Under Voltage ProtectionChandra Shekhar100% (1)
- Accident Prevention System Using Driver Drowsiness DetectionDocumento5 pagineAccident Prevention System Using Driver Drowsiness DetectionInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- PPTDocumento14 paginePPTAnil RaghuvaranNessuna valutazione finora
- Automatic Staircase LightningDocumento23 pagineAutomatic Staircase LightningAniket Pawar100% (3)
- "Smart Irrigation System Using Internet of Things": Under The Guidance ofDocumento32 pagine"Smart Irrigation System Using Internet of Things": Under The Guidance ofANKIT KUMARNessuna valutazione finora
- Human Following Robot-2 PDFDocumento7 pagineHuman Following Robot-2 PDFSUDEEPTA CHANDRA PAULNessuna valutazione finora
- Diamond Security System in A Museum With Loud 60dB SireN1Documento50 pagineDiamond Security System in A Museum With Loud 60dB SireN1Midde ShekarNessuna valutazione finora
- Chapter One: Smart City SolutionsDocumento27 pagineChapter One: Smart City Solutionssnehal sabnisNessuna valutazione finora
- Portable Mobile Charger UPSDocumento16 paginePortable Mobile Charger UPSGopiKrishnaNessuna valutazione finora
- Patient Health Monitoring System Using IOTDocumento4 paginePatient Health Monitoring System Using IOTAnonymous CUPykm6DZNessuna valutazione finora
- Iot Based Control and Monitoring of Smart Grid and Power Theft Detection by Locating AreaDocumento17 pagineIot Based Control and Monitoring of Smart Grid and Power Theft Detection by Locating AreaakashlogicNessuna valutazione finora
- Gesture RecognitionDocumento24 pagineGesture RecognitionSenthamil SelvanNessuna valutazione finora
- Distance Measuring With ULTRASONIC SENSOR WITH AURDINO ReportDocumento10 pagineDistance Measuring With ULTRASONIC SENSOR WITH AURDINO ReportHassan AliNessuna valutazione finora
- Motion Sensor For Security Light Using Pir SensorDocumento3 pagineMotion Sensor For Security Light Using Pir SensorSamaira Shahnoor Parvin100% (1)
- Automatic Room Temperature Controlled Fan Using Arduino Uno MicrocontrollerDocumento14 pagineAutomatic Room Temperature Controlled Fan Using Arduino Uno Microcontrollerkiros negash100% (1)
- Arduino FINAL Presentation... AGSDocumento33 pagineArduino FINAL Presentation... AGSGagleen RissamNessuna valutazione finora
- Smart Notice BoardDocumento42 pagineSmart Notice BoardDhiraj BhattNessuna valutazione finora
- Bidirectional Visitor Counter With Security System and Automated Room Light ControllerDocumento4 pagineBidirectional Visitor Counter With Security System and Automated Room Light ControllerInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Automatic Railway Gate ControlDocumento22 pagineAutomatic Railway Gate ControlsriramNessuna valutazione finora
- Lecture 9 USB To PIC Microcontroller InterfaceDocumento8 pagineLecture 9 USB To PIC Microcontroller Interfaceaaaa100% (1)
- The University of Faisalabad: Department of Electrical Engineering TechnologyDocumento44 pagineThe University of Faisalabad: Department of Electrical Engineering TechnologySumaira SaifNessuna valutazione finora
- C08 Rme PPT1 21221Documento45 pagineC08 Rme PPT1 21221DHANANJAY VIJAYKUMAR BILENessuna valutazione finora
- Ultrasonic SensorDocumento5 pagineUltrasonic SensorKarla VillamerNessuna valutazione finora
- HC sr04Documento4 pagineHC sr04Abdullah ZafarNessuna valutazione finora
- Industrial Elecs Lecture PDFDocumento94 pagineIndustrial Elecs Lecture PDFJaneNessuna valutazione finora
- Broadcasting Defined: Midterms Lecture 2Documento7 pagineBroadcasting Defined: Midterms Lecture 2JaneNessuna valutazione finora
- RectifiersDocumento39 pagineRectifiersJaneNessuna valutazione finora
- Fiber Optics PDFDocumento92 pagineFiber Optics PDFJaneNessuna valutazione finora
- Sound MeasurementsDocumento45 pagineSound MeasurementsJaneNessuna valutazione finora
- List of CountriesDocumento9 pagineList of CountriesJaneNessuna valutazione finora
- A Complete Chapter Quiz: Error Detection and CorrectionDocumento4 pagineA Complete Chapter Quiz: Error Detection and CorrectionJaneNessuna valutazione finora
- BITRATESDocumento4 pagineBITRATESJaneNessuna valutazione finora
- Iot and 5G History Evolution and Its Architecture Their Compatibility and FutureDocumento72 pagineIot and 5G History Evolution and Its Architecture Their Compatibility and FutureJaneNessuna valutazione finora
- 2018A FE AM Answer PDFDocumento1 pagina2018A FE AM Answer PDFJaneNessuna valutazione finora
- ThyristorDocumento2 pagineThyristorJaneNessuna valutazione finora
- Amazing Raece - Team Building Activity - Harina RelayDocumento2 pagineAmazing Raece - Team Building Activity - Harina RelayJaneNessuna valutazione finora
- Analog Transmission MCQDocumento5 pagineAnalog Transmission MCQJaneNessuna valutazione finora
- A Complete Chapter Quiz: Bandwidth Utilization: Multiplexing and SpreadingDocumento4 pagineA Complete Chapter Quiz: Bandwidth Utilization: Multiplexing and SpreadingJane100% (1)
- ModulationDocumento9 pagineModulationJaneNessuna valutazione finora
- VectorsDocumento2 pagineVectorsJaneNessuna valutazione finora
- Shunt GeneratorDocumento1 paginaShunt GeneratorJaneNessuna valutazione finora
- Oscillators: de La Salle University - Dasmariñas College of Engineering, Architecture, and Technology Engineering ProgramDocumento9 pagineOscillators: de La Salle University - Dasmariñas College of Engineering, Architecture, and Technology Engineering ProgramJaneNessuna valutazione finora
- Latches and Flip-Flop: Finals - Lecture 2Documento28 pagineLatches and Flip-Flop: Finals - Lecture 2JaneNessuna valutazione finora
- Module 25: Programming in C++: Partha Pratim DasDocumento17 pagineModule 25: Programming in C++: Partha Pratim Dasswaraj bhatnagarNessuna valutazione finora
- Departmental Models 641a UpgradeDocumento13 pagineDepartmental Models 641a UpgradeKrish NarajNessuna valutazione finora
- T2K13 SeedsDocumento16 pagineT2K13 SeedsRyan Thomas100% (8)
- CMT Eh15Documento50 pagineCMT Eh15Eletrônica Maia Comércio e ServiçosNessuna valutazione finora
- Digital IntermediateDocumento2 pagineDigital Intermediateanon_755138626Nessuna valutazione finora
- PHP MySQLDocumento85 paginePHP MySQLDevendraNessuna valutazione finora
- Data Sheet 6ES7234-4HE32-0XB0: General InformationDocumento4 pagineData Sheet 6ES7234-4HE32-0XB0: General Informationnik amirulNessuna valutazione finora
- ch19 - 2 PLC.1Documento16 paginech19 - 2 PLC.1jthanikNessuna valutazione finora
- Crush Salary Week3.28-3.30Documento6 pagineCrush Salary Week3.28-3.30Israel Leyson MillareNessuna valutazione finora
- Capstone ProjectDocumento29 pagineCapstone ProjectPrashant A UNessuna valutazione finora
- Training Calendar 2011Documento44 pagineTraining Calendar 2011riteshsamantray521383Nessuna valutazione finora
- G Is The Cop Number of G. We Present Asymptotic Results For TheDocumento16 pagineG Is The Cop Number of G. We Present Asymptotic Results For Thesaravanancseb8567Nessuna valutazione finora
- Using External Data Integration Services R12Documento89 pagineUsing External Data Integration Services R12Felipe GutiérrezNessuna valutazione finora
- Mark Scheme End of Year Exam: EDPM Paper 2 Question 1 (Copy Test) Total 10 Marks AccuracyDocumento6 pagineMark Scheme End of Year Exam: EDPM Paper 2 Question 1 (Copy Test) Total 10 Marks AccuracyJanicSmithNessuna valutazione finora
- Cmc4 Configuration Parameter List: Id Idhex Pname Llimit Ulimit Def Etext Range - enDocumento7 pagineCmc4 Configuration Parameter List: Id Idhex Pname Llimit Ulimit Def Etext Range - enSami Vehmas0% (1)
- LTspiceIV FlyerDocumento2 pagineLTspiceIV FlyerAnonymous UZ5xA8Nessuna valutazione finora
- Readme FpgaDocumento5 pagineReadme Fpgabima saktiNessuna valutazione finora
- Microsoft Excel TutorialDocumento90 pagineMicrosoft Excel Tutorialteacher.lexleo2782100% (1)
- Modern Power System Matlab Simulation, Pspice, SVC-HVDC Transmission, STATCOM, Location of Facts, Power System ME, M.tech, B.Tech, BE Final Year IEEE Projects 2011 - 2012Documento3 pagineModern Power System Matlab Simulation, Pspice, SVC-HVDC Transmission, STATCOM, Location of Facts, Power System ME, M.tech, B.Tech, BE Final Year IEEE Projects 2011 - 2012srini_792002Nessuna valutazione finora
- Case Study The Waterfall Model and The Agile MethodologiesDocumento7 pagineCase Study The Waterfall Model and The Agile MethodologiesFekadu AlemayhuNessuna valutazione finora
- Exercises 1 Systems of Linear Equations, MatricesDocumento2 pagineExercises 1 Systems of Linear Equations, MatricesNgô Anh TúNessuna valutazione finora
- DCS A-10C Keyboard LayoutDocumento7 pagineDCS A-10C Keyboard LayoutMichiel Erasmus100% (2)
- Advanced Scan I21no2Documento29 pagineAdvanced Scan I21no2Jaiber SosaNessuna valutazione finora
- Lecture Note Unit 1-4Documento54 pagineLecture Note Unit 1-4birtukan aregaNessuna valutazione finora
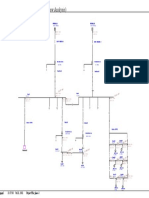
- One-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVDocumento1 paginaOne-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVhaiderNessuna valutazione finora
- Dynamodb DGDocumento771 pagineDynamodb DGashishojha1980Nessuna valutazione finora
- User Authentication-Passwords, Biometrics and AlternativesDocumento36 pagineUser Authentication-Passwords, Biometrics and AlternativesReza EsnaashariNessuna valutazione finora
- Anaya BachilleratoDocumento24 pagineAnaya Bachilleratogabriel simunovic0% (5)
- VTAM 4R2 Early User ExperiencesDocumento248 pagineVTAM 4R2 Early User Experiencesgborja8881331Nessuna valutazione finora