Potrebbero piacerti anche
- Check SauceDocumento2 pagineCheck Saucebig boss90% (10)
- Service Manual JLG 1055 S-N01600727600Documento566 pagineService Manual JLG 1055 S-N01600727600RAPID EQUIPMENT RENTAL67% (6)
- Enabling Emulation and Evaluation of IEC 61850 Networks With TITANDocumento18 pagineEnabling Emulation and Evaluation of IEC 61850 Networks With TITANEdward EdwardNessuna valutazione finora
- LINDE Spare Parts ListDocumento2 pagineLINDE Spare Parts Listsharafudheen_s100% (2)
- Industrial Networks For Communication and ControlDocumento49 pagineIndustrial Networks For Communication and ControlanubstephenNessuna valutazione finora
- 802.1.4 and 802.15.6 PDFDocumento5 pagine802.1.4 and 802.15.6 PDFjayavenu12094Nessuna valutazione finora
- Hydrostatic Pressure Test Safety ChecklistDocumento3 pagineHydrostatic Pressure Test Safety ChecklistJerry Faria60% (5)
- VTP Renault 6.14.1 Web Version - Pdf.pagespeed - Ce.c T5zGltXA PDFDocumento176 pagineVTP Renault 6.14.1 Web Version - Pdf.pagespeed - Ce.c T5zGltXA PDFIbrahim AwadNessuna valutazione finora
- Plant Intelligent Automation and Digital Transformation: Volume I: Process and Factory AutomationDa EverandPlant Intelligent Automation and Digital Transformation: Volume I: Process and Factory AutomationNessuna valutazione finora
- Philippine Phoenix Surety & Insurance, Inc. Vs Woodworks, Inc Digest - MungcalDocumento1 paginaPhilippine Phoenix Surety & Insurance, Inc. Vs Woodworks, Inc Digest - Mungcalc2_charishmungcalNessuna valutazione finora
- Implementation of BS 8500 2006 Concrete Minimum Cover PDFDocumento13 pagineImplementation of BS 8500 2006 Concrete Minimum Cover PDFJimmy Lopez100% (1)
- The IEC 61850 Standard - Communication Networks and Automation Systems From An Electrical Engineering Point of ViewDocumento4 pagineThe IEC 61850 Standard - Communication Networks and Automation Systems From An Electrical Engineering Point of ViewAngelica Escobar MorenoNessuna valutazione finora
- Modeling Distribution Automation SystemDocumento6 pagineModeling Distribution Automation SystemAlanMolinaNessuna valutazione finora
- NMIMS Offer LetterDocumento4 pagineNMIMS Offer LetterSUBHAJITNessuna valutazione finora
- System Description For Use With DESIGO XWORKS 17285 HQ enDocumento48 pagineSystem Description For Use With DESIGO XWORKS 17285 HQ enAnonymous US9AFTR02100% (1)
- ScadaDocumento3 pagineScadaAkira SatoNessuna valutazione finora
- A WSN Solution For Light Aircraft Pilot Health MonitoringDocumento6 pagineA WSN Solution For Light Aircraft Pilot Health MonitoringAshwani SinghNessuna valutazione finora
- A Hardware Software WSN Platform Rojas Barrett Issc 2017 PDFDocumento6 pagineA Hardware Software WSN Platform Rojas Barrett Issc 2017 PDFRamsha KhanNessuna valutazione finora
- A Hardware Software WSN Platform Rojas Barrett Issc 2017Documento6 pagineA Hardware Software WSN Platform Rojas Barrett Issc 2017ajaz ahmedNessuna valutazione finora
- Sensors: A Wireless Sensor System For Real-Time Monitoring and Fault Detection of Motor ArraysDocumento5 pagineSensors: A Wireless Sensor System For Real-Time Monitoring and Fault Detection of Motor ArraysAbhijeet KeerNessuna valutazione finora
- Gas Leakage Detection and Monitoring PDFDocumento5 pagineGas Leakage Detection and Monitoring PDFNationalinstituteDsnrNessuna valutazione finora
- This Is My DocumentDocumento14 pagineThis Is My DocumentSyed Mian Fahim KakakhailNessuna valutazione finora
- Sensors 17 00469Documento21 pagineSensors 17 00469TejaNessuna valutazione finora
- Performance Evaluation of Aodv Protocol For Energy Consumption and Qos in Ieee 802.15.4 Based Wireless Sensor Network Using Qualnet SimulatorDocumento11 paginePerformance Evaluation of Aodv Protocol For Energy Consumption and Qos in Ieee 802.15.4 Based Wireless Sensor Network Using Qualnet Simulatorambie tubeNessuna valutazione finora
- Edge Processing and Enterprise Integration Closing The Gap On Sensor NetworksDocumento11 pagineEdge Processing and Enterprise Integration Closing The Gap On Sensor NetworksSrioNessuna valutazione finora
- Ijesat 2012 02 Si 01 07Documento4 pagineIjesat 2012 02 Si 01 07Ijesat JournalNessuna valutazione finora
- Ar2004-1107-1120 Domdouzis Anumba and ThorpeDocumento11 pagineAr2004-1107-1120 Domdouzis Anumba and ThorpeUnknownNessuna valutazione finora
- IO-Link Wireless Enhanced Sensors and Actuators For Industry 4.0 NetworksDocumento5 pagineIO-Link Wireless Enhanced Sensors and Actuators For Industry 4.0 NetworksJonathan HopkinsNessuna valutazione finora
- Role of IEC 61850 & GOOSE in Substation Automation: A ReviewDocumento4 pagineRole of IEC 61850 & GOOSE in Substation Automation: A ReviewInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Go Mac PapDocumento5 pagineGo Mac Papsyedsalman1984Nessuna valutazione finora
- CommsSubstationC R Ozansoy1Documento7 pagineCommsSubstationC R Ozansoy1Fernando RojasNessuna valutazione finora
- Wireless Sensor Networks: A Survey On The State of The Art and The 802.15.4 and Zigbee StandardsDocumento41 pagineWireless Sensor Networks: A Survey On The State of The Art and The 802.15.4 and Zigbee StandardsluckyboythongNessuna valutazione finora
- The IEEE 802.15.4 For Wireless Sensor NetworkDocumento3 pagineThe IEEE 802.15.4 For Wireless Sensor NetworkIJIRSTNessuna valutazione finora
- Applied Sciences: Building Wireless Control Applications With Xbee and LabviewDocumento20 pagineApplied Sciences: Building Wireless Control Applications With Xbee and LabviewPablo Andres Gomez MonsalveNessuna valutazione finora
- RSRC TEL Making Substations PaperDocumento9 pagineRSRC TEL Making Substations PaperCrit TandNessuna valutazione finora
- Performance Analysis of Short Distance Wireless Sensor Networks Using MoteviewDocumento6 paginePerformance Analysis of Short Distance Wireless Sensor Networks Using MoteviewMehboob Ul HaqNessuna valutazione finora
- thuật toán thông số phần cứng...Documento9 paginethuật toán thông số phần cứng...larvaNessuna valutazione finora
- Sensors: Industrial Iot Monitoring: Technologies and Architecture ProposalDocumento32 pagineSensors: Industrial Iot Monitoring: Technologies and Architecture ProposalDrakzNessuna valutazione finora
- With Cover Page v2Documento11 pagineWith Cover Page v2Cường Dương QuốcNessuna valutazione finora
- Railway Traffic ControlDocumento4 pagineRailway Traffic ControlJournalNX - a Multidisciplinary Peer Reviewed JournalNessuna valutazione finora
- A Review On Ieee 1451 Family of Standards and Iot Stack LayersDocumento5 pagineA Review On Ieee 1451 Family of Standards and Iot Stack LayersSyed ZakirNessuna valutazione finora
- Wireless Sensor NetworkDocumento13 pagineWireless Sensor NetworkArchuRajanNessuna valutazione finora
- 1.1 Need of Project: Fig. 1.1: Infrastructured of SensorDocumento12 pagine1.1 Need of Project: Fig. 1.1: Infrastructured of SensorRam KrishnaNessuna valutazione finora
- Wearable Sensor Network For Lower Limb Angle Estimation in Robotics ApplicationsDocumento10 pagineWearable Sensor Network For Lower Limb Angle Estimation in Robotics ApplicationsTELKOMNIKANessuna valutazione finora
- Analysis of Communication Network Challenges For Synchrophasor-Based Wide-Area ApplicationsDocumento12 pagineAnalysis of Communication Network Challenges For Synchrophasor-Based Wide-Area ApplicationsMohan ThakreNessuna valutazione finora
- IJRECE-A Review of IEEE 1451 24.06.2018 PDFDocumento5 pagineIJRECE-A Review of IEEE 1451 24.06.2018 PDFSyed ZakirNessuna valutazione finora
- Towards IEEE 802.22 Based SCADA System For Future Distributed SystemDocumento7 pagineTowards IEEE 802.22 Based SCADA System For Future Distributed SystemkayakurbanoNessuna valutazione finora
- Wide-Area Long-Range Unidirectional Sensor (WALRUS) Network: Mitsubishi Electric Research Laboratories, Inc., 2006Documento10 pagineWide-Area Long-Range Unidirectional Sensor (WALRUS) Network: Mitsubishi Electric Research Laboratories, Inc., 2006Kiran ChakravarthulaNessuna valutazione finora
- Substation Automation and SCADA ProtocolsDocumento6 pagineSubstation Automation and SCADA ProtocolsDrAshok Kumar TiwariNessuna valutazione finora
- Comparison Between Different Wireless Sensor Simulation ToolsDocumento7 pagineComparison Between Different Wireless Sensor Simulation ToolsInternational Organization of Scientific Research (IOSR)0% (1)
- Analysis and Comparative Study of Data Communication Protocols in Wireless Sensor NetworksDocumento4 pagineAnalysis and Comparative Study of Data Communication Protocols in Wireless Sensor NetworksMuh MuhNessuna valutazione finora
- IEEE-P1451.2 Smart Transducer Interface ModuleDocumento14 pagineIEEE-P1451.2 Smart Transducer Interface ModuleWikel_Baenk_6747Nessuna valutazione finora
- Towards IEEE 802.22 Based SCADA System For Future Distributed SystemDocumento7 pagineTowards IEEE 802.22 Based SCADA System For Future Distributed System18-208 LingaNessuna valutazione finora
- Zigbee Based Wireless Sensor Networks For Smart Campus: JournalDocumento8 pagineZigbee Based Wireless Sensor Networks For Smart Campus: JournalwissemNessuna valutazione finora
- A Smart Zigbee Based Wireless Weather Station Monitoring SystemDocumento6 pagineA Smart Zigbee Based Wireless Weather Station Monitoring SystemHachem ElyousfiNessuna valutazione finora
- IEEE P21451-1-7: Providing More Efficient Network Services Over MQTT-SNDocumento5 pagineIEEE P21451-1-7: Providing More Efficient Network Services Over MQTT-SNRafael TenfenNessuna valutazione finora
- Techniques For Minimizing Power Consumption in Low Data-Rate Wireless Sensor NetworksDocumento5 pagineTechniques For Minimizing Power Consumption in Low Data-Rate Wireless Sensor NetworksNikos ArvanitisNessuna valutazione finora
- Bluetooth Based Wireless Sensor Networks - Implementation Issues and SolutionsDocumento7 pagineBluetooth Based Wireless Sensor Networks - Implementation Issues and SolutionsSai Divya GoudNessuna valutazione finora
- Assignment No. 1Documento8 pagineAssignment No. 1Rahul RajpurohitkNessuna valutazione finora
- Introduction To Industrial Networks: Unit 3Documento31 pagineIntroduction To Industrial Networks: Unit 3Mantenimiento MendezNessuna valutazione finora
- Research Plan Proposal: The Iis University, JaipurDocumento17 pagineResearch Plan Proposal: The Iis University, JaipurchanduNessuna valutazione finora
- VDL Mode 41 Stdma A CNS Data LinkDocumento6 pagineVDL Mode 41 Stdma A CNS Data LinkPushkal Pratap SinghNessuna valutazione finora
- SDN PDFDocumento2 pagineSDN PDFAyeshaNessuna valutazione finora
- Quality of Service Support Security and OSPF InterDocumento8 pagineQuality of Service Support Security and OSPF InterDũngNessuna valutazione finora
- Unit 3 - Internet of Things - WWW - Rgpvnotes.inDocumento7 pagineUnit 3 - Internet of Things - WWW - Rgpvnotes.inShivam Pratap Singh RajawatNessuna valutazione finora
- Industrial Cybersecurity For Power System and Scada NetworksDocumento7 pagineIndustrial Cybersecurity For Power System and Scada NetworksRajib BanerjeeNessuna valutazione finora
- Rec 156 New Sep 2018 PDFDocumento8 pagineRec 156 New Sep 2018 PDFcitaccitacNessuna valutazione finora
- Oliveira 2015Documento5 pagineOliveira 2015sowande.obaloluwaNessuna valutazione finora
- Structure of A Wireless Sensor NodeDocumento3 pagineStructure of A Wireless Sensor NodeReyansh AryaNessuna valutazione finora
- Energy Aware Node Placement Algorithm For Wireless Sensor NetworkDocumento8 pagineEnergy Aware Node Placement Algorithm For Wireless Sensor NetworkAmulya AnuragNessuna valutazione finora
- Relay Node Placement in Wireless Sensor Networks Using Modified Genetic AlgorithmDocumento6 pagineRelay Node Placement in Wireless Sensor Networks Using Modified Genetic AlgorithmAmulya AnuragNessuna valutazione finora
- Particle Swarm Optimization Based Deployment For WSN With The Existence of ObstaclesDocumento5 pagineParticle Swarm Optimization Based Deployment For WSN With The Existence of ObstaclesAmulya AnuragNessuna valutazione finora
- Deployment Optimization of Wireless Sensor Network - NewDocumento20 pagineDeployment Optimization of Wireless Sensor Network - NewAmulya AnuragNessuna valutazione finora
- Overview - of - Strategies - and - Metrics - of - Node Deployment PDFDocumento3 pagineOverview - of - Strategies - and - Metrics - of - Node Deployment PDFAmulya AnuragNessuna valutazione finora
- IJETA-V4I2P13 O. Deepa Dr. J. Suguna PDFDocumento6 pagineIJETA-V4I2P13 O. Deepa Dr. J. Suguna PDFAmulya AnuragNessuna valutazione finora
- 04 Sensors AircraftDocumento3 pagine04 Sensors AircraftSatishReddyNessuna valutazione finora
- A WSN Solution For Light Aircraft Pilot Health MonitoringDocumento6 pagineA WSN Solution For Light Aircraft Pilot Health MonitoringAmulya AnuragNessuna valutazione finora
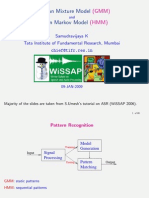
- GMMDocumento12 pagineGMMAmulya AnuragNessuna valutazione finora
- Wireless ProtocolDocumento10 pagineWireless ProtocolLina GanNessuna valutazione finora
- Security Issues in Wireless Sensor NetworksDocumento5 pagineSecurity Issues in Wireless Sensor NetworksSatyam SinghNessuna valutazione finora
- gmmHmmTutoChief Wissap09Documento61 paginegmmHmmTutoChief Wissap09Gil DobryNessuna valutazione finora
- Openness and The Market Friendly ApproachDocumento27 pagineOpenness and The Market Friendly Approachmirzatouseefahmed100% (2)
- Chapin Dance Syllabus 23-24Documento3 pagineChapin Dance Syllabus 23-24api-231581209Nessuna valutazione finora
- NV 2Documento2 pagineNV 2Joshua ApongolNessuna valutazione finora
- DL5/DL6 With CBD6S: User ManualDocumento32 pagineDL5/DL6 With CBD6S: User ManualMeOminGNessuna valutazione finora
- Prime Time 3 Workbook GrammarDocumento2 paginePrime Time 3 Workbook GrammarSourCreamNessuna valutazione finora
- PDF 24Documento8 paginePDF 24Nandan ReddyNessuna valutazione finora
- LCD Television Service Manual: Chassis MTK8222 Product TypeDocumento46 pagineLCD Television Service Manual: Chassis MTK8222 Product TypetvdenNessuna valutazione finora
- Chapter 2: Static Routing: Instructor MaterialsDocumento63 pagineChapter 2: Static Routing: Instructor MaterialsAhmad Mustafa AbimayuNessuna valutazione finora
- Dy DX: NPTEL Course Developer For Fluid Mechanics Dr. Niranjan Sahoo Module 04 Lecture 33 IIT-GuwahatiDocumento7 pagineDy DX: NPTEL Course Developer For Fluid Mechanics Dr. Niranjan Sahoo Module 04 Lecture 33 IIT-GuwahatilawanNessuna valutazione finora
- Executive Order No. 786, S. 1982Documento5 pagineExecutive Order No. 786, S. 1982Angela Igoy-Inac MoboNessuna valutazione finora
- PRANIR ProfileDocumento14 paginePRANIR ProfileManish VadanereNessuna valutazione finora
- ATH SR5BT DatasheetDocumento1 paginaATH SR5BT DatasheetspeedbeatNessuna valutazione finora
- Abhijit Auditorium Elective Sem 09Documento3 pagineAbhijit Auditorium Elective Sem 09Abhijit Kumar AroraNessuna valutazione finora
- TelekomDocumento2 pagineTelekomAnonymous eS7MLJvPZCNessuna valutazione finora
- 5d814c4d6437b300fd0e227a - Scorch Product Sheet 512GB PDFDocumento1 pagina5d814c4d6437b300fd0e227a - Scorch Product Sheet 512GB PDFBobby B. BrownNessuna valutazione finora
- BIR Form 2307Documento20 pagineBIR Form 2307Lean Isidro0% (1)
- 20091216-153551-APC Smart-UPS 1500VA USB SUA1500IDocumento4 pagine20091216-153551-APC Smart-UPS 1500VA USB SUA1500Ifietola1Nessuna valutazione finora
- Lets Talk About Food Fun Activities Games Oneonone Activities Pronuncia - 1995Documento1 paginaLets Talk About Food Fun Activities Games Oneonone Activities Pronuncia - 1995IAmDanaNessuna valutazione finora
- Nexys4-DDR RMDocumento29 pagineNexys4-DDR RMDocente Fede TecnologicoNessuna valutazione finora
- Catalogo AMF Herramientas para AtornillarDocumento76 pagineCatalogo AMF Herramientas para Atornillarabelmonte_geotecniaNessuna valutazione finora
- Unpacking and Storage Instruction-EN-0807Documento18 pagineUnpacking and Storage Instruction-EN-0807Tim ZHANGNessuna valutazione finora