Potrebbero piacerti anche
- Modulo 2Documento22 pagineModulo 2Israel GonzalesNessuna valutazione finora
- Lab 3 MecatronicaDocumento27 pagineLab 3 MecatronicaChristian Pereira100% (1)
- L6 - Generador Síncrono Con CargaDocumento13 pagineL6 - Generador Síncrono Con CargaNilson RamosNessuna valutazione finora
- Guia 2.1. Laboratorio Comunicacion Profibus DPDocumento5 pagineGuia 2.1. Laboratorio Comunicacion Profibus DPpatrick corcueraNessuna valutazione finora
- VF Altivar 28Documento14 pagineVF Altivar 28migblagonNessuna valutazione finora
- Informe Partidor SuaveDocumento11 pagineInforme Partidor SuaveMagdiel AriasNessuna valutazione finora
- TECSUPDocumento23 pagineTECSUPJhonatan Cano DominguezNessuna valutazione finora
- S03. Pantalla HMIDocumento33 pagineS03. Pantalla HMIHenry Sullca CcorahuaNessuna valutazione finora
- Cicloconvertidor ComercialDocumento25 pagineCicloconvertidor ComercialCarlos Asem100% (1)
- Lab 01 - ASiDocumento22 pagineLab 01 - ASiArturoNessuna valutazione finora
- Clasificación de Sensores DigitalesDocumento6 pagineClasificación de Sensores Digitalespablo calderon huamanNessuna valutazione finora
- Laboratorio 7Documento14 pagineLaboratorio 7Ramonmanuel Portocarrero CardenasNessuna valutazione finora
- Arrancadores SuavesDocumento14 pagineArrancadores SuavesDavid MiseNessuna valutazione finora
- Semana 3 Produccion Maquinas Giratorias CalculosDocumento35 pagineSemana 3 Produccion Maquinas Giratorias CalculosOmar DSNessuna valutazione finora
- Reporte de Práctica 1 - PLCDocumento7 pagineReporte de Práctica 1 - PLCOscarNessuna valutazione finora
- Curso Controles Operacion Componentes Cargador l2350 LetourneauDocumento35 pagineCurso Controles Operacion Componentes Cargador l2350 LetourneauAlexis Piñones CantoNessuna valutazione finora
- PLC ExposicionDocumento39 paginePLC ExposicionLuis Justo100% (1)
- Perdidas en El TransformadorDocumento86 paginePerdidas en El TransformadorChris M. Vilchez JesusNessuna valutazione finora
- LAB 07 - Electrónica de PotenciaDocumento23 pagineLAB 07 - Electrónica de PotenciaChristian FernandoNessuna valutazione finora
- Diagrama de Bloques de FuncionesDocumento3 pagineDiagrama de Bloques de FuncionesMarco V. ModumbaNessuna valutazione finora
- 01 - Sensores e Identificación de Un Sistema MecatrónicoDocumento20 pagine01 - Sensores e Identificación de Un Sistema MecatrónicoOrdoñez M FrankNessuna valutazione finora
- Control On-OfDocumento11 pagineControl On-OfClau Ri CaNessuna valutazione finora
- Tutor Tribologia 2Documento19 pagineTutor Tribologia 2SEAHORSE79Nessuna valutazione finora
- Lab05-Control On-Off y FT de 2 OrdenDocumento14 pagineLab05-Control On-Off y FT de 2 OrdenRodrigo HerreraNessuna valutazione finora
- Trabajo Final - Selección de MotoresDocumento1 paginaTrabajo Final - Selección de MotoresNelson Larry CcamaqueNessuna valutazione finora
- Pull Up - Pull DownDocumento6 paginePull Up - Pull DownJOSE ALFREDO AMARO OLAYANessuna valutazione finora
- 6 RX 17000 Ad 78Documento714 pagine6 RX 17000 Ad 78Jilber HernandezNessuna valutazione finora
- Variador de Frecuencia IG5ADocumento9 pagineVariador de Frecuencia IG5AMery MorNessuna valutazione finora
- Clasificacion y Definicion de Subestaciones ElectricasDocumento10 pagineClasificacion y Definicion de Subestaciones ElectricasJesus Manuel GonzalezNessuna valutazione finora
- Arranque de MotoresDocumento14 pagineArranque de MotoresFrancisco ZuñigaNessuna valutazione finora
- Sistemas Mecatronicos Industriales Lab N 1Documento10 pagineSistemas Mecatronicos Industriales Lab N 1Hector Martin Inca SuycoNessuna valutazione finora
- S09. Circuitos Electrohidráulicos y ElectroneumáticosDocumento57 pagineS09. Circuitos Electrohidráulicos y ElectroneumáticosJosé Andrés ConchaNessuna valutazione finora
- Fallas en Sistema de Refrigeracion & Aire AcondicionadoDocumento5 pagineFallas en Sistema de Refrigeracion & Aire AcondicionadoJaimeRodrigzdeZNessuna valutazione finora
- Laboratorio 1 y 2Documento32 pagineLaboratorio 1 y 2AlbertoVega0% (1)
- Práctica 7 Control de Motores Eléctricos Cme Práctica 7 (Recuperado Automáticamente)Documento19 paginePráctica 7 Control de Motores Eléctricos Cme Práctica 7 (Recuperado Automáticamente)Angélica Bahena BahenaNessuna valutazione finora
- Circuitos ElectricosDocumento22 pagineCircuitos ElectricosChristian Paul Pelinco SucapucaNessuna valutazione finora
- Ejercicio Tipos de MantenimientoDocumento2 pagineEjercicio Tipos de MantenimientoAlbert Martinez OsorioNessuna valutazione finora
- Informe de Sensores NTC y PTCDocumento27 pagineInforme de Sensores NTC y PTCJunior GYNessuna valutazione finora
- Arranque Por FotoceldaDocumento11 pagineArranque Por FotoceldaJunior StevenNessuna valutazione finora
- SevomotoresDocumento31 pagineSevomotoresUlises QuintanillaNessuna valutazione finora
- Diapositiva #15 QuedaDocumento47 pagineDiapositiva #15 QuedaWalter Raul Valentin AlvarezNessuna valutazione finora
- Guía de Laboratorio 9Documento2 pagineGuía de Laboratorio 9Lusmila FloresNessuna valutazione finora
- Lincoln Centromatic p653sDocumento44 pagineLincoln Centromatic p653sRonald esquivelNessuna valutazione finora
- Lab 03 - Enlace Entre Un PLC y Un HMIDocumento16 pagineLab 03 - Enlace Entre Un PLC y Un HMIRodrigo Cabrera EspinozaNessuna valutazione finora
- Guía de Laboratorio N°2 Sensores de ProximidadDocumento5 pagineGuía de Laboratorio N°2 Sensores de ProximidadArturo72Nessuna valutazione finora
- DiagramaChancado InstrumentalDocumento14 pagineDiagramaChancado InstrumentalEymi Gianella Layza EscobarNessuna valutazione finora
- TermostatoDocumento4 pagineTermostatoAnonymous 7goCzstshyNessuna valutazione finora
- Laboratorio #1 - Motor HidraulicoDocumento17 pagineLaboratorio #1 - Motor Hidraulicozafra25100% (1)
- Informe Tecnico SwitchDocumento6 pagineInforme Tecnico Switchross89Nessuna valutazione finora
- Lab 06 - Sensor de Posición y VelocidadDocumento11 pagineLab 06 - Sensor de Posición y VelocidadOlger Aragon BerlangaNessuna valutazione finora
- 6RA70 DCM Instrucciones de Servicio FW2.2 - 2005Documento734 pagine6RA70 DCM Instrucciones de Servicio FW2.2 - 2005danielzanNessuna valutazione finora
- Laboratorio #2 Estudio de Mercado: Determinación Del Mercado ObjetivoDocumento3 pagineLaboratorio #2 Estudio de Mercado: Determinación Del Mercado ObjetivoMedina Diaz EduardoNessuna valutazione finora
- S01-2 - Sensores IDocumento54 pagineS01-2 - Sensores IJOEL APONTE ORTIZNessuna valutazione finora
- TECSUP: Transformadores Lab 6 Fundamento TeoricoDocumento10 pagineTECSUP: Transformadores Lab 6 Fundamento Teoricojuan0% (1)
- Pruebas ElectricasDocumento40 paginePruebas ElectricasJose Enrique MunguiaNessuna valutazione finora
- Tiristor GCT e IgctDocumento16 pagineTiristor GCT e Igctdany0% (1)
- Lab 3Documento14 pagineLab 3williamNessuna valutazione finora
- Practica 1Documento22 paginePractica 1Sickma KaobaNessuna valutazione finora
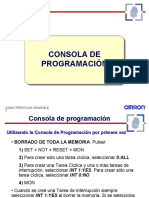
- Omron 05Documento46 pagineOmron 05Felipe VargasNessuna valutazione finora
- Clase 2 SistemasEmbebidosDocumento38 pagineClase 2 SistemasEmbebidosAnonymous TFLtpxuWZNessuna valutazione finora
- Ppss-500-Op-E-002 - Er Instalación de Bandeja Portacable y Tuberia ConduitDocumento8 paginePpss-500-Op-E-002 - Er Instalación de Bandeja Portacable y Tuberia ConduitAndrei Ponce WongNessuna valutazione finora
- Curso - Foundation Fieldbus - PEEP PDFDocumento62 pagineCurso - Foundation Fieldbus - PEEP PDFAndrei Ponce WongNessuna valutazione finora
- Ppss-500-Op-E-002 - Instalacion de Bandejas Portacable y Tuberia ConduitDocumento17 paginePpss-500-Op-E-002 - Instalacion de Bandejas Portacable y Tuberia ConduitAndrei Ponce WongNessuna valutazione finora
- Brochure Electroriso PDFDocumento10 pagineBrochure Electroriso PDFAndrei Ponce WongNessuna valutazione finora
- Manual CCS EspañolDocumento70 pagineManual CCS Españoljkfran50% (4)
- Pic16 ComparaDocumento5 paginePic16 ComparaAndrei Ponce WongNessuna valutazione finora
- Fundamentos de SensoricaDocumento64 pagineFundamentos de SensoricaAndrei Ponce WongNessuna valutazione finora
- 01 - 2 RS485Documento20 pagine01 - 2 RS485Jorge Núñez Melgar ChirinosNessuna valutazione finora
- Tipos de Programación PLCDocumento17 pagineTipos de Programación PLCAndrei Ponce WongNessuna valutazione finora
- Getting StartedDocumento35 pagineGetting StartedAndrei Ponce WongNessuna valutazione finora
- Fundamentos de SensoricaDocumento67 pagineFundamentos de SensoricaAndrei Ponce WongNessuna valutazione finora
- 01 - 1 RS232Documento15 pagine01 - 1 RS232Jorge Núñez Melgar ChirinosNessuna valutazione finora
- Clase 2 Lógica CombinacionalDocumento10 pagineClase 2 Lógica CombinacionalAndrei Ponce WongNessuna valutazione finora
- Introducción Al PLC PDFDocumento20 pagineIntroducción Al PLC PDFAndrei Ponce WongNessuna valutazione finora
- Transistores BJT, Darlington, Mosfet, IgbtDocumento8 pagineTransistores BJT, Darlington, Mosfet, IgbtAndrei Ponce WongNessuna valutazione finora
- Protocolos IndustrialesDocumento3 pagineProtocolos IndustrialesjalbeiromorenoNessuna valutazione finora
- Pic16 ComparaDocumento5 paginePic16 ComparaAndrei Ponce WongNessuna valutazione finora
- Sensores Fotoeléctricos IIDocumento82 pagineSensores Fotoeléctricos IIAndrei Ponce WongNessuna valutazione finora
- Fundamentos de SensoricaDocumento67 pagineFundamentos de SensoricaAndrei Ponce WongNessuna valutazione finora
- Redes SiemensDocumento34 pagineRedes SiemensAndrei Ponce WongNessuna valutazione finora
- Convertidor TEIP11Documento12 pagineConvertidor TEIP11Dennis Espinoza RospigliosiNessuna valutazione finora
- Automatismo y Cuadros ElectricosDocumento46 pagineAutomatismo y Cuadros Electricostuarek75% (8)
- Actuadores NeumaticosDocumento6 pagineActuadores NeumaticosAndrei Ponce WongNessuna valutazione finora
- Transistores BJT, Darlington, Mosfet, IgbtDocumento8 pagineTransistores BJT, Darlington, Mosfet, IgbtAndrei Ponce WongNessuna valutazione finora
- Sensores de Temperatura 2014 1Documento59 pagineSensores de Temperatura 2014 1Andrei Ponce WongNessuna valutazione finora
- Automatismo y Cuadros ElectricosDocumento46 pagineAutomatismo y Cuadros Electricostuarek75% (8)
- Sesion 2 Tecnologia de La Automatizacion y Del ControlDocumento15 pagineSesion 2 Tecnologia de La Automatizacion y Del ControlAndrei Ponce WongNessuna valutazione finora
- Sesion 1tecnologias de La Automatizacion y Del Control 1Documento16 pagineSesion 1tecnologias de La Automatizacion y Del Control 1Andrei Ponce WongNessuna valutazione finora
- Versiones de AndroidDocumento9 pagineVersiones de AndroidChristian Jhon Agustin HilarioNessuna valutazione finora
- Manual de Ore ControlDocumento122 pagineManual de Ore ControlCésar Onque GálvezNessuna valutazione finora
- Actividad Valor Posiconal N°1Documento4 pagineActividad Valor Posiconal N°1Ayleen Francisca Valdivia MaldonadoNessuna valutazione finora
- Unidad 5 - Variables Aleatorias ContinuasDocumento60 pagineUnidad 5 - Variables Aleatorias ContinuasCeleste CasillaNessuna valutazione finora
- Sesión de Clase 3 Repr Arq 3Documento12 pagineSesión de Clase 3 Repr Arq 3Harumi AucaruriNessuna valutazione finora
- Practica 6.1Documento2 paginePractica 6.1Bryan YanzapantaNessuna valutazione finora
- Vender en Internet Javier Escribano Arrechea. SubrayadoDocumento315 pagineVender en Internet Javier Escribano Arrechea. Subrayadoquelinmc100% (1)
- TRABAJO GRUPAL N°4 - Ajuste Polinomial de Grado P y Linealización de Funciones PotencialesDocumento9 pagineTRABAJO GRUPAL N°4 - Ajuste Polinomial de Grado P y Linealización de Funciones PotencialesCARMEN CASTELONessuna valutazione finora
- Smart Propo Plus Paso A Paso PDFDocumento20 pagineSmart Propo Plus Paso A Paso PDFRicardo Ezquerra75% (4)
- Cargador Baterías 18650Documento15 pagineCargador Baterías 18650carnesdehesaNessuna valutazione finora
- Gestion de Almacenes - Grupo02Documento53 pagineGestion de Almacenes - Grupo02Cielo Taboada LluenNessuna valutazione finora
- Molina Carlos Gestión Información NormativaDocumento111 pagineMolina Carlos Gestión Información NormativaEvi SánchezNessuna valutazione finora
- Blanca Primera CorrecciónDocumento25 pagineBlanca Primera Correcciónalejandro castilloNessuna valutazione finora
- Sistema de Control Automático de Posicionamiento y Accionamiento de Pistones Hidráulicos para Máquina TroqueladoraDocumento121 pagineSistema de Control Automático de Posicionamiento y Accionamiento de Pistones Hidráulicos para Máquina Troqueladoraluiscampos77100% (1)
- 02 Ravpac-PDocumento6 pagine02 Ravpac-PEmmanuel ZamoranoNessuna valutazione finora
- Ejercicios A. Mat. Iii Verano 2020Documento9 pagineEjercicios A. Mat. Iii Verano 2020Alexis Miguel RSNessuna valutazione finora
- Curso Riesgos Probabilisticos Usando El @RISK Cusco PDFDocumento115 pagineCurso Riesgos Probabilisticos Usando El @RISK Cusco PDFRicardo VilaNessuna valutazione finora
- IntangibleDocumento51 pagineIntangibleJorge Q. ChaconNessuna valutazione finora
- SCAKX32Documento4 pagineSCAKX32rer0427Nessuna valutazione finora
- Actividad S9 Permisos en Linux PDFDocumento7 pagineActividad S9 Permisos en Linux PDFyefersondiazNessuna valutazione finora
- Monografia de Programacion Net en Visual StudioDocumento19 pagineMonografia de Programacion Net en Visual StudioVictor Jose Carreno GuerraNessuna valutazione finora
- Unidad 2 Mapa ConceptualDocumento7 pagineUnidad 2 Mapa ConceptualNorma Yulet TrinidadNessuna valutazione finora
- Tarea3.3 Ulises BerrunDocumento30 pagineTarea3.3 Ulises BerrunFelix MendozaNessuna valutazione finora
- Inspección de Ensambles Electrónicos Norma A-610 - Nivel I - Agosto 2015Documento52 pagineInspección de Ensambles Electrónicos Norma A-610 - Nivel I - Agosto 2015TDFRIOGRANDENessuna valutazione finora
- Brochure Erp-Mba3 Enterprise EditionDocumento40 pagineBrochure Erp-Mba3 Enterprise EditionWellingtonNessuna valutazione finora
- Ejercicios Funcion Si y Ref - AbsolutasDocumento7 pagineEjercicios Funcion Si y Ref - AbsolutasYerlis Uribe CisnerosNessuna valutazione finora
- X-4to - Ecuaciones Polinomiales de Grado Superior (Sin Audio)Documento26 pagineX-4to - Ecuaciones Polinomiales de Grado Superior (Sin Audio)Sandra ParodiNessuna valutazione finora
- Tutorial Como Crear Un Carro de ComprasDocumento13 pagineTutorial Como Crear Un Carro de ComprasMaria Rodriguez GonzalezNessuna valutazione finora
- Aritmetica de SaturacionDocumento3 pagineAritmetica de SaturacionJosue ParedesNessuna valutazione finora
- Huapaya Blanco George Diseño Prototipo MáquinaDocumento85 pagineHuapaya Blanco George Diseño Prototipo MáquinaDANNY ISAAC CARVAJAL GAVILANESNessuna valutazione finora