Potrebbero piacerti anche
- Actividades de Robótica EV3 para El Profesor OcupadoDocumento153 pagineActividades de Robótica EV3 para El Profesor OcupadoKäma ShoNessuna valutazione finora
- Robótica Educativa. Prácticas y Actividades: RobóticaDa EverandRobótica Educativa. Prácticas y Actividades: RobóticaValutazione: 3.5 su 5 stelle3.5/5 (2)
- Proyecto 3 Robotica Ev3 Core 1 29Documento18 pagineProyecto 3 Robotica Ev3 Core 1 29Victor Rafael JS100% (1)
- Taller LEGO WeDo PDFDocumento33 pagineTaller LEGO WeDo PDFpablogerman2100% (1)
- Introduccion A Programacion Con Lego Mindstorm Ev3 PDFDocumento42 pagineIntroduccion A Programacion Con Lego Mindstorm Ev3 PDFMar242009Nessuna valutazione finora
- Robotica Educativa para EscolaresDocumento19 pagineRobotica Educativa para EscolaresAland Bravo Vecorena100% (2)
- LEGO EV3. Programación de Robots: RobóticaDa EverandLEGO EV3. Programación de Robots: RobóticaValutazione: 5 su 5 stelle5/5 (2)
- Nutricion en Las Plantas-BederDocumento8 pagineNutricion en Las Plantas-BederVictor Rafael JS100% (1)
- Sistemas 1Documento24 pagineSistemas 1Santosenz91% (11)
- PDFDocumento125 paginePDFDulzhee QkaramelOo Avendaño MoralezzNessuna valutazione finora
- Práctica Robótica Nº 1Documento4 paginePráctica Robótica Nº 1tecnic1965100% (1)
- Proyecto Final RoboticaDocumento25 pagineProyecto Final RoboticaRichard AriasNessuna valutazione finora
- 20140410ReviewLibroRobotica PDFDocumento1 pagina20140410ReviewLibroRobotica PDFMorales PoncianoNessuna valutazione finora
- Capacitacion Completa EV3Documento90 pagineCapacitacion Completa EV3laurinuno100% (2)
- ScratchGuiaReferencia PDFDocumento7 pagineScratchGuiaReferencia PDFPedro Joaquin Lucas CabelloNessuna valutazione finora
- Manual Ev3 ProfesoresDocumento26 pagineManual Ev3 ProfesoresJunior Figueroa100% (1)
- Guia NXT Sesion1Documento32 pagineGuia NXT Sesion1Araceli GuandulayNessuna valutazione finora
- RoboticaDocumento15 pagineRoboticaMarla NogueiraNessuna valutazione finora
- Manual de Robotica para Mis Alumnos Del TallerDocumento66 pagineManual de Robotica para Mis Alumnos Del TallerAndrea Rublev100% (1)
- Guia 2 Wedo 1.0 Manual ADocumento3 pagineGuia 2 Wedo 1.0 Manual AgalanxxxNessuna valutazione finora
- Coloreando y Programando ScratchDocumento43 pagineColoreando y Programando Scratcha2217729Nessuna valutazione finora
- Manual Técnico - Mindstorms EV3Documento44 pagineManual Técnico - Mindstorms EV3Javier Valdivia83% (6)
- Tutorial Scratch 2.0Documento29 pagineTutorial Scratch 2.0Sakura RaNessuna valutazione finora
- Actividades de Robótica EV3 para El Profesor OcupadoDocumento153 pagineActividades de Robótica EV3 para El Profesor OcupadoKäma Sho100% (5)
- Manual S2-C2U1 PDFDocumento15 pagineManual S2-C2U1 PDFluceroNessuna valutazione finora
- Robótica Wedo TiradorDocumento14 pagineRobótica Wedo Tiradoraronchito1100% (2)
- Robótica WeDo GuíaDocumento35 pagineRobótica WeDo Guíaaronchito1Nessuna valutazione finora
- ScratchDocumento59 pagineScratchMaribel Chuye CoronadoNessuna valutazione finora
- Temario y Ejercicios NXT ManuelDocumento32 pagineTemario y Ejercicios NXT ManuelSoy Clat100% (1)
- Retos Con Lego Mindstorms 1 - Latas FueraDocumento36 pagineRetos Con Lego Mindstorms 1 - Latas FueraKoldoNessuna valutazione finora
- Ayuda Lego Mindstorms Ev3Documento190 pagineAyuda Lego Mindstorms Ev3Edwin HuichoNessuna valutazione finora
- Robótica WeDo León RugienteDocumento23 pagineRobótica WeDo León Rugientearonchito1Nessuna valutazione finora
- Modulo 1Documento27 pagineModulo 1ABRAHAM CASO TORRESNessuna valutazione finora
- 1 - Iniciación Á Robótica Con LEGO MindStorms EV3Documento65 pagine1 - Iniciación Á Robótica Con LEGO MindStorms EV3xancalrosNessuna valutazione finora
- GUÍA DE REFERENCIA Scratch 1.4 CTCDocumento53 pagineGUÍA DE REFERENCIA Scratch 1.4 CTCPAC0CAPNessuna valutazione finora
- Guia Didactica Robotica PDFDocumento62 pagineGuia Didactica Robotica PDFJulio QuinchoNessuna valutazione finora
- Microbit Ultra Firmeeee - Máster en Formación Del Profesorado de Educación SecundariaDocumento88 pagineMicrobit Ultra Firmeeee - Máster en Formación Del Profesorado de Educación SecundariaLimbania BernalNessuna valutazione finora
- 6 Robotica BasicaDocumento9 pagine6 Robotica BasicaFabricio Zabala AlvaradoNessuna valutazione finora
- Robotica Prontuario 2do SECUNDARIA SeptiembreDocumento1 paginaRobotica Prontuario 2do SECUNDARIA SeptiembreMARIO MALDONADO GREGORIONessuna valutazione finora
- Máquinas Simples y MotorizadasDocumento2 pagineMáquinas Simples y Motorizadasapi-238064613100% (2)
- 6 GUIA5 Interfaz de ScratchDocumento8 pagine6 GUIA5 Interfaz de Scratchhecuba73Nessuna valutazione finora
- Robotica Al CurriculoDocumento11 pagineRobotica Al CurriculoEriberto Jaime Agüero RicapaNessuna valutazione finora
- Manual ScratchDocumento29 pagineManual ScratchJorge Betancur0% (1)
- Rubric A ScratchDocumento218 pagineRubric A ScratchAdrian BarquinNessuna valutazione finora
- Plano Del Prototipo Lego Ev3Documento7 paginePlano Del Prototipo Lego Ev3jhonnyNessuna valutazione finora
- Rueda de La Fortuna Lego Wedo PDFDocumento36 pagineRueda de La Fortuna Lego Wedo PDFCesar Humberto Huapaya Huapaya100% (1)
- Manual EV3Documento45 pagineManual EV3Dixon Collantes G67% (3)
- Guía Metodológica 5to - 6togrado - Aprendo A Programar PDFDocumento26 pagineGuía Metodológica 5to - 6togrado - Aprendo A Programar PDFcinthya madrigalNessuna valutazione finora
- Actividades Con Scratch 2 - Muestra GratisDocumento12 pagineActividades Con Scratch 2 - Muestra GratisDian Gustari M.Nessuna valutazione finora
- Lego Mindstorms NXTDocumento17 pagineLego Mindstorms NXTYahir100% (1)
- Actividad 1 - Digiaventuras - 01 - La Compu Por DentroDocumento8 pagineActividad 1 - Digiaventuras - 01 - La Compu Por DentroBel HerediaNessuna valutazione finora
- Exercicis Scratch 4 1011Documento24 pagineExercicis Scratch 4 1011auxiliadoraticNessuna valutazione finora
- Guía 2021 Juegos RobóticaDocumento35 pagineGuía 2021 Juegos RobóticaWashington CaraguayNessuna valutazione finora
- 1 Primera Clase ScratchDocumento15 pagine1 Primera Clase Scratchgerald ochoa perezNessuna valutazione finora
- Taller de Creación de Videojuegos Con ScratchDocumento30 pagineTaller de Creación de Videojuegos Con ScratchEugeSanchezNessuna valutazione finora
- Trabajos A Fines Contenido Robotica y Mas PDFDocumento64 pagineTrabajos A Fines Contenido Robotica y Mas PDFJorge E Gonzalez PNessuna valutazione finora
- Capacitación Avanzada EV3Documento40 pagineCapacitación Avanzada EV3pachecomitzi100% (1)
- Guia de Actividades We DoDocumento4 pagineGuia de Actividades We DoEduardo Martín Brenis LanegraNessuna valutazione finora
- Robótica WeDo PrincipiosTecnologicosDocumento108 pagineRobótica WeDo PrincipiosTecnologicosaronchito1100% (1)
- Mapa Competencia 28 PDFDocumento1 paginaMapa Competencia 28 PDFVictor Rafael JSNessuna valutazione finora
- Como Enseñar La Lección ConceptosDocumento16 pagineComo Enseñar La Lección ConceptosVictor Rafael JSNessuna valutazione finora
- Manual de Instalación Paneles Fotovoltaicos Yingli SolarDocumento5 pagineManual de Instalación Paneles Fotovoltaicos Yingli SolarneymarronNessuna valutazione finora
- Zoom WJC - Taller 2Documento43 pagineZoom WJC - Taller 2Victor Rafael JSNessuna valutazione finora
- Cuadro de Proceso de Enseñanza-AprendizajeDocumento1 paginaCuadro de Proceso de Enseñanza-AprendizajeVictor Rafael JSNessuna valutazione finora
- Cronistas ConquistaDocumento16 pagineCronistas ConquistaluchoNessuna valutazione finora
- Competencia 28 Desempeños Secundaria PDFDocumento3 pagineCompetencia 28 Desempeños Secundaria PDFVictor Rafael JSNessuna valutazione finora
- CIENCIA Y ROBOTICA Rutas PDFDocumento18 pagineCIENCIA Y ROBOTICA Rutas PDFVictor Rafael JSNessuna valutazione finora
- RoboticaeducativaDocumento114 pagineRoboticaeducativaKike AkaGardfieldNessuna valutazione finora
- 3 Tablas de AlimentosDocumento4 pagine3 Tablas de AlimentosVictor Rafael JSNessuna valutazione finora
- EduTrends Gamificación PDFDocumento36 pagineEduTrends Gamificación PDFhsilvera_73Nessuna valutazione finora
- Servidor de Escuela CentOS 2018Documento13 pagineServidor de Escuela CentOS 2018Victor Rafael JSNessuna valutazione finora
- Cómo Hacer Las Preguntas de Un KahootDocumento2 pagineCómo Hacer Las Preguntas de Un KahootVictor Rafael JSNessuna valutazione finora
- Rubrica5 JardinDocumento17 pagineRubrica5 JardinVictor Rafael JSNessuna valutazione finora
- Oráculo Matemágico - Guía de Instalación WindowsDocumento6 pagineOráculo Matemágico - Guía de Instalación WindowsZulma IsabelNessuna valutazione finora
- EduTrends Gamificación PDFDocumento36 pagineEduTrends Gamificación PDFhsilvera_73Nessuna valutazione finora
- Plandetutoria 170503161058Documento1 paginaPlandetutoria 170503161058walychasNessuna valutazione finora
- Servidor de Escuela CentOS 2018Documento56 pagineServidor de Escuela CentOS 2018Alejandro Gonzáles CastilloNessuna valutazione finora
- Plan de Mantenimiento 2016Documento3 paginePlan de Mantenimiento 2016Victor Rafael JSNessuna valutazione finora
- Documento - Programa Curricular de Educación SecundariaDocumento67 pagineDocumento - Programa Curricular de Educación SecundariaVictor Rafael JSNessuna valutazione finora
- Psicología Evolutiva. Piaget Versus VygostkyDocumento19 paginePsicología Evolutiva. Piaget Versus VygostkyNoé BernalNessuna valutazione finora
- Cronistas ConquistaDocumento36 pagineCronistas ConquistaVictor Rafael JSNessuna valutazione finora
- Oráculo Matemágico - Guía de Instalación WindowsDocumento6 pagineOráculo Matemágico - Guía de Instalación WindowsZulma IsabelNessuna valutazione finora
- Los Cronistas de La Conquista Molina PDFDocumento18 pagineLos Cronistas de La Conquista Molina PDFVictor Rafael JSNessuna valutazione finora
- Sesion de Aprendizaje Robotica Educativa Wedo 2018Documento17 pagineSesion de Aprendizaje Robotica Educativa Wedo 2018Victor Rafael JSNessuna valutazione finora
- Cronistas ConquistaDocumento16 pagineCronistas ConquistaluchoNessuna valutazione finora
- Expoc ObservacionesDocumento36 pagineExpoc ObservacionescarlosbalncoNessuna valutazione finora
- Unidad 5 DESARROLLO DE APLICACIONES PARA DISPOSITIVOS MOVILESDocumento9 pagineUnidad 5 DESARROLLO DE APLICACIONES PARA DISPOSITIVOS MOVILESgattaca25bakerNessuna valutazione finora
- Modularidad y Arreglos en ProgramacionDocumento11 pagineModularidad y Arreglos en ProgramacionWilsonMuñozLeonNessuna valutazione finora
- Actividad #2Documento1 paginaActividad #2Kelly LopezNessuna valutazione finora
- Artículos Relacionados Con Scratch y Geometría FractalDocumento33 pagineArtículos Relacionados Con Scratch y Geometría FractalAlondra EsloNessuna valutazione finora
- Ejercicios Sobre Aut Omatas Finitos y Otras M Aquinas DeterministasDocumento3 pagineEjercicios Sobre Aut Omatas Finitos y Otras M Aquinas DeterministasNicky BlecckerNessuna valutazione finora
- Proyecto de Grado - XyzDocumento9 pagineProyecto de Grado - XyzJose IntriagoNessuna valutazione finora
- Modulo II Desarrolla Software de Aplicación UtilizandoDocumento10 pagineModulo II Desarrolla Software de Aplicación UtilizandojpmphoenixNessuna valutazione finora
- Funciones Y ProcedimientosDocumento2 pagineFunciones Y ProcedimientosViktor VaronNessuna valutazione finora
- VBA en Excel 2010Documento18 pagineVBA en Excel 2010Manuel Beltran NoguesNessuna valutazione finora
- Clases Cisco Modulo 1 XDDocumento41 pagineClases Cisco Modulo 1 XDGiancarlos DámazoNessuna valutazione finora
- Tecsup Trabajo Final .ExcelDocumento3 pagineTecsup Trabajo Final .ExcelAlexander ColqeNessuna valutazione finora
- Trabajo de InvestigacionDocumento5 pagineTrabajo de InvestigacionOttorafael Gonzalez ContrerasNessuna valutazione finora
- Capitulo-4 Fundamentos ProgramacionDocumento18 pagineCapitulo-4 Fundamentos ProgramacionmanuelNessuna valutazione finora
- Programación Orientada A ObjetosDocumento5 pagineProgramación Orientada A ObjetosLeví QuispeNessuna valutazione finora
- EGC InformaticaDocumento31 pagineEGC InformaticaCarmen Gonzalez Gonzalez AlvaradoNessuna valutazione finora
- Simulacion de Sistemas Discretos ExamenDocumento21 pagineSimulacion de Sistemas Discretos ExamenStephania LuciaNessuna valutazione finora
- Antologia Completa Informatica. IIDocumento64 pagineAntologia Completa Informatica. IIelena lopez alba100% (1)
- Manual Diseño GráficoDocumento132 pagineManual Diseño GráficoCrismar Isabel Mora VallesNessuna valutazione finora
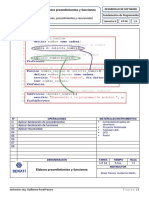
- Hoja de Tareas 05 - Fundamentos de Programación - FUNCIONESDocumento11 pagineHoja de Tareas 05 - Fundamentos de Programación - FUNCIONESGuillermo RoselNessuna valutazione finora
- Manual de Introducción A Matlab PDFDocumento26 pagineManual de Introducción A Matlab PDFSabino HectorCamposNessuna valutazione finora
- BDD y TDD en El Mundo Real IIDocumento6 pagineBDD y TDD en El Mundo Real IIRicardo AhumadaNessuna valutazione finora
- 1 Pract IntroDocumento26 pagine1 Pract IntroNorman CubillaNessuna valutazione finora
- ABB OM IRC5 With FlexPendant RW 6-EsDocumento322 pagineABB OM IRC5 With FlexPendant RW 6-EsAlexNessuna valutazione finora
- Excel Módulo 4 - Macros PDFDocumento17 pagineExcel Módulo 4 - Macros PDFDanielNessuna valutazione finora
- Cap2 - Sin Transiciones PDFDocumento61 pagineCap2 - Sin Transiciones PDFJaime GodoyNessuna valutazione finora
- Analisis de ProgramaDocumento14 pagineAnalisis de ProgramaRJ CarbajalNessuna valutazione finora
- SQL InjectionDocumento6 pagineSQL InjectionFaby ReveloNessuna valutazione finora
- Modulo 2 - Resolucion de ProblemasDocumento14 pagineModulo 2 - Resolucion de ProblemasJaime SousaNessuna valutazione finora