Potrebbero piacerti anche
- Señales digitales y analógicas en sistemas eléctricos y electrónicos automotricesDocumento96 pagineSeñales digitales y analógicas en sistemas eléctricos y electrónicos automotricesMiguel Cardenas100% (12)
- 160203ed PDFDocumento14 pagine160203ed PDFDennis Olaya100% (2)
- Scania PDFDocumento91 pagineScania PDFnardiego100% (2)
- Ctricidad y Electronica Avanzada SDP3 Abril 2009Documento173 pagineCtricidad y Electronica Avanzada SDP3 Abril 2009Nelson100% (5)
- Interfas de ScaniaDocumento81 pagineInterfas de Scaniafersky100% (2)
- SesamnDocumento54 pagineSesamnRihan Hilario100% (1)
- Sistema Eletrico Scania CompletoDocumento73 pagineSistema Eletrico Scania CompletoBerišlavWladimirVladiloPeric100% (11)
- Edc E44Documento12 pagineEdc E44cdoniguian100% (1)
- Componentes Electrico SCANIa PDFDocumento100 pagineComponentes Electrico SCANIa PDFRillmer Rivero CabezasNessuna valutazione finora
- Manual ScaneoDocumento58 pagineManual ScaneoCristhian IpanaqueNessuna valutazione finora
- Scania SDP3 Manual UsuarioDocumento76 pagineScania SDP3 Manual UsuarioChristopher Jesus Reàtegui Olivares100% (3)
- 120301e1 Suspencion Elc AntiguaDocumento36 pagine120301e1 Suspencion Elc AntiguaJavier Amorin100% (7)
- ECA Scania P, G, RDocumento15 pagineECA Scania P, G, RLucas Laporte100% (7)
- Tacografo - ScaniaDocumento28 pagineTacografo - ScaniaRobert Orosco B.100% (2)
- Electricidad y Electrónica Avanzada-SDP3 Abril 2009Documento173 pagineElectricidad y Electrónica Avanzada-SDP3 Abril 2009Danny Rodriguez Sanchez89% (45)
- Redes MultiplexadasDocumento51 pagineRedes MultiplexadasDavid ReveloNessuna valutazione finora
- Problem InfoDocumento24 pagineProblem InfoCristhian Ipanaque100% (2)
- ACS Sistema de Control de ArticulacionDocumento5 pagineACS Sistema de Control de ArticulacionOsvaldo HernandezNessuna valutazione finora
- SDP3 PDFDocumento124 pagineSDP3 PDFChristian Ramos Campos100% (2)
- SuspensionDocumento36 pagineSuspensionWr Sb89% (9)
- Sistema Electrico P, R y T.Documento72 pagineSistema Electrico P, R y T.Jose Luis Calla Huanca100% (11)
- Coordinador ScaniaDocumento31 pagineCoordinador ScaniaTito Gsxr87% (15)
- 40-Scania - Curso Electricidad y Electronica AvanzadaDocumento227 pagine40-Scania - Curso Electricidad y Electronica AvanzadaJuan Carlos Castellar Orozco100% (2)
- Lubricación Automática Del Chasis ACLDocumento28 pagineLubricación Automática Del Chasis ACLValdeir AlmeidaNessuna valutazione finora
- Manual de Trabajos en Scania IDocumento67 pagineManual de Trabajos en Scania IElvis Eberth Huanca Machaca100% (2)
- Localizacion de Averias ElectDocumento68 pagineLocalizacion de Averias Electmilton100% (1)
- Coordinador Scania PDFDocumento31 pagineCoordinador Scania PDFSimón Huanca Gallardo100% (1)
- Manual Scania K410Documento5 pagineManual Scania K410WillNajarroChavelon0% (1)
- Ajuste de altura de fuelles en camiones y autobuses ScaniaDocumento12 pagineAjuste de altura de fuelles en camiones y autobuses ScaniaWalter Taipe QuispeNessuna valutazione finora
- Componentes Electrico SCANIaDocumento100 pagineComponentes Electrico SCANIaTeofilo Flores92% (13)
- Caja de Velocidades Robotizada SuzukiDocumento3 pagineCaja de Velocidades Robotizada SuzukiLuis Miguel Muñoz SantosNessuna valutazione finora
- Scania b7Documento13 pagineScania b7Monito Choa Baso100% (2)
- Sistema de Combustible Con Inyector Bomba y EDC MS6 - FuncionamientoDocumento55 pagineSistema de Combustible Con Inyector Bomba y EDC MS6 - FuncionamientoCristhian Ipanaque100% (1)
- Todo sobre las sondas Lambda: Construcción, funcionamiento y averíasDocumento16 pagineTodo sobre las sondas Lambda: Construcción, funcionamiento y averíasHeber HuallpaNessuna valutazione finora
- Scania Componentes ElectricosDocumento299 pagineScania Componentes ElectricosRainorSS100% (20)
- Capacitación Lectura Planos EléctricosDocumento17 pagineCapacitación Lectura Planos EléctricosHenry Cardenas Correa100% (3)
- Curso ScaniaDocumento6 pagineCurso ScaniaDavid LifeDj Jr.100% (2)
- Apostila Multiplex G7 Espanhol PDFDocumento47 pagineApostila Multiplex G7 Espanhol PDFRahel Santos PisquilaNessuna valutazione finora
- FusiblesScaniaSerie4Documento8 pagineFusiblesScaniaSerie4Amanca Veloz Deybis100% (4)
- WSM 0000457 03Documento48 pagineWSM 0000457 03brayandparavicino100% (1)
- Ventilación Del Cárter Cerrada (CCV)Documento24 pagineVentilación Del Cárter Cerrada (CCV)juan100% (1)
- Treinamento G7 Eletricistas EspanholDocumento88 pagineTreinamento G7 Eletricistas Espanholfrankpz71% (7)
- Curso de Capacitacion en Camiones SCANIA, Volvo, Mercedes Benz y Caterpillar PDFDocumento10 pagineCurso de Capacitacion en Camiones SCANIA, Volvo, Mercedes Benz y Caterpillar PDFInfomecanica Tools83% (6)
- PdeDocumento45 paginePdeeliano222222275% (4)
- SMS ELC3 ConexDocumento5 pagineSMS ELC3 ConexNilton Tejeda Mucha100% (1)
- Mid 216 DiagnosticoDocumento14 pagineMid 216 DiagnosticoDaniel HonoratoNessuna valutazione finora
- Manual Scania Diagramas Electricos AutobusesDocumento164 pagineManual Scania Diagramas Electricos AutobusesOzi Pinazo82% (34)
- Scania Sistemas Electricos - CroppedDocumento86 pagineScania Sistemas Electricos - Croppedjose pirulli100% (3)
- Ecas PremiunDocumento60 pagineEcas PremiunDavid Arnaez100% (2)
- Obd ScaniaDocumento93 pagineObd ScaniaCRISTIAN ORTIZNessuna valutazione finora
- Multiplexado en El Automovil Programa de Curso de MultiplexadoDocumento11 pagineMultiplexado en El Automovil Programa de Curso de MultiplexadoHilda AriasNessuna valutazione finora
- CAN BUS Manuel Rangel SeguíDocumento21 pagineCAN BUS Manuel Rangel SeguíManuel Rangel100% (1)
- Protocolo Red CanDocumento31 pagineProtocolo Red CanGuadalupe CamposNessuna valutazione finora
- Señales Can High Can LowDocumento11 pagineSeñales Can High Can LowJIMMY CHUNG PAIMA100% (1)
- Apunte Sistema CANDocumento14 pagineApunte Sistema CANLuca BaudoNessuna valutazione finora
- 2 Red CanDocumento18 pagine2 Red CanmaycolNessuna valutazione finora
- CanbusDocumento36 pagineCanbusEduardo Cruz100% (2)
- Linea CanDocumento34 pagineLinea CanSebastián AguileraNessuna valutazione finora
- Can-Bus, protocolo comunicación automóvilDocumento9 pagineCan-Bus, protocolo comunicación automóvilCesar PacoriNessuna valutazione finora
- Lineas CAN BUSDocumento5 pagineLineas CAN BUSFernando Pigazos MotaNessuna valutazione finora
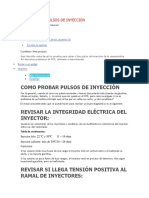
- Como Probar Pulsos de Inyección 3Documento1 paginaComo Probar Pulsos de Inyección 3Felix Rafael Alvarado100% (1)
- Modulo de 9 Terminales Chev...Documento1 paginaModulo de 9 Terminales Chev...Felix Rafael AlvaradoNessuna valutazione finora
- Como Probar Pulsos de InyecciónDocumento4 pagineComo Probar Pulsos de InyecciónYolanda CastilloNessuna valutazione finora
- Tutorial Escaner OBD2 PDFDocumento182 pagineTutorial Escaner OBD2 PDFHomer Sadych Henao MarinNessuna valutazione finora
- Como Probar Pulsos de InyecciónDocumento4 pagineComo Probar Pulsos de InyecciónYolanda CastilloNessuna valutazione finora
- Como Hacer Una Punta LógicaDocumento4 pagineComo Hacer Una Punta LógicaYolanda CastilloNessuna valutazione finora
- Regulador ChequeoDocumento1 paginaRegulador ChequeoFelix Rafael Alvarado100% (1)
- Mod. Tfi de 6 TerminalesDocumento1 paginaMod. Tfi de 6 TerminalesFelix Rafael AlvaradoNessuna valutazione finora
- Inst. Reg. ExternoDocumento1 paginaInst. Reg. ExternoFelix Rafael AlvaradoNessuna valutazione finora
- Como Probar Pulsos de InyecciónDocumento4 pagineComo Probar Pulsos de InyecciónYolanda CastilloNessuna valutazione finora
- Cómo hacer una lámpara lógica de prueba con LEDDocumento3 pagineCómo hacer una lámpara lógica de prueba con LEDMarco Castillo100% (13)
- Diagnóstico Del Módulo de Encendido TFI IMDocumento4 pagineDiagnóstico Del Módulo de Encendido TFI IMYolanda CastilloNessuna valutazione finora
- BobinasDocumento1 paginaBobinasFelix Rafael Alvarado100% (1)
- Cable de Test Con Bombilla Mixto Voltimetro PDFDocumento1 paginaCable de Test Con Bombilla Mixto Voltimetro PDFFelix Rafael Alvarado100% (1)
- Cómo hacer una lámpara lógica de prueba con LEDDocumento3 pagineCómo hacer una lámpara lógica de prueba con LEDMarco Castillo100% (13)
- Como Hacer Una Punta LógicaDocumento4 pagineComo Hacer Una Punta LógicaYolanda CastilloNessuna valutazione finora
- Curso de Electronica Practica PDFDocumento57 pagineCurso de Electronica Practica PDFSudis11Nessuna valutazione finora
- Modulo HEI 8 puntas guíaDocumento1 paginaModulo HEI 8 puntas guíaFelix Rafael Alvarado100% (1)
- Diagramas Fuentes PCDocumento1 paginaDiagramas Fuentes PCFelix Rafael AlvaradoNessuna valutazione finora
- Electronica Facil-01 - Aurelio MejiaDocumento112 pagineElectronica Facil-01 - Aurelio MejiaAlbert Eistein100% (4)
- Orden de EncendidosDocumento1 paginaOrden de EncendidosFelix Rafael AlvaradoNessuna valutazione finora
- Recuperación Del Magnetrón en Hornos de MicroondasDocumento16 pagineRecuperación Del Magnetrón en Hornos de Microondaslondon335Nessuna valutazione finora
- Diagramas Fuentes PC PDFDocumento6 pagineDiagramas Fuentes PC PDFMad_Max_HJNessuna valutazione finora
- Curso TV ChinasDocumento60 pagineCurso TV Chinasjesus90% (58)
- Diagramas Fuentes PC PDFDocumento6 pagineDiagramas Fuentes PC PDFMad_Max_HJNessuna valutazione finora
- Fallas TV SankeyDocumento1 paginaFallas TV Sankeyestribi284% (19)
- El Sistema de Alto Voltaje en Hornos de MicroondasDocumento23 pagineEl Sistema de Alto Voltaje en Hornos de MicroondasFelix Rafael AlvaradoNessuna valutazione finora
- Reparación de Control RemotoDocumento7 pagineReparación de Control Remotonokiazune12Nessuna valutazione finora
- Circuitos de Seguridad y Protección en Hornos de MicroondasDocumento23 pagineCircuitos de Seguridad y Protección en Hornos de MicroondasElena Peraza CastellanoNessuna valutazione finora
- CONEXION de CARGASDocumento30 pagineCONEXION de CARGASJose Luis GiustiNessuna valutazione finora
- Guía de los mejores periféricos para el mercadoDocumento13 pagineGuía de los mejores periféricos para el mercadoRonny FabricioNessuna valutazione finora
- Buffer o ControladorDocumento6 pagineBuffer o Controladorkristel100% (1)
- Componentes y funciones de la placa baseDocumento96 pagineComponentes y funciones de la placa baseßengi Obando0% (1)
- L7 UsersManualDocumento300 pagineL7 UsersManualAna Ramos LopezNessuna valutazione finora
- AnexoChevystar 11Documento32 pagineAnexoChevystar 11Wilson PuertaNessuna valutazione finora
- Qué Es PROFIBUSDocumento7 pagineQué Es PROFIBUSJoseph Junior Jahuira TaparaNessuna valutazione finora
- Arquitectura de Computadoras - Interconexión con busesDocumento10 pagineArquitectura de Computadoras - Interconexión con busesGustavo MerloNessuna valutazione finora
- Automatas Programables A. Aguinaga PDFDocumento107 pagineAutomatas Programables A. Aguinaga PDFMariela BelénNessuna valutazione finora
- UNEXCA cuestionario arquitectura computadorDocumento4 pagineUNEXCA cuestionario arquitectura computadordeirys arraizNessuna valutazione finora
- Microprocesadores y MicrocomputadorasDocumento27 pagineMicroprocesadores y MicrocomputadorasluisNessuna valutazione finora
- BIOSDocumento22 pagineBIOSusuario darioNessuna valutazione finora
- 1012118Documento151 pagine1012118denis100% (1)
- Reporte 07 Comunicacion SerialDocumento16 pagineReporte 07 Comunicacion Serialpizano2Nessuna valutazione finora
- DFP21BDocumento116 pagineDFP21BGabriel PlonerNessuna valutazione finora
- Unidad EsDocumento44 pagineUnidad EsLuis Enrique67% (3)
- FS185 RPSDocumento86 pagineFS185 RPSFranciscoSuarezNessuna valutazione finora
- Curso Audiovisual de Montaje y Reparación de OrdenadoresDocumento8 pagineCurso Audiovisual de Montaje y Reparación de OrdenadoresOmarzinho Burgos PalaciosNessuna valutazione finora
- Puertos y Buses de Comunicación para MicrocontroladoresDocumento5 paginePuertos y Buses de Comunicación para MicrocontroladoresNestor Vargas100% (5)
- P6 Full DCDocumento7 pagineP6 Full DCIgnacio rivera laraNessuna valutazione finora
- Planificación Anual CET1 InformáticaDocumento7 paginePlanificación Anual CET1 InformáticaCarlos Damian ArgañarazNessuna valutazione finora
- ELECTRICODocumento56 pagineELECTRICOVladimir Valdivia LlancaNessuna valutazione finora
- Temario M01 2101 Qa03Documento183 pagineTemario M01 2101 Qa03Tick TackNessuna valutazione finora
- Aplicación de Un Relevador de Sobrecorriente Con Capacidades Dinámicas de Ajuste en Redes Radiales de DistribuciónDocumento7 pagineAplicación de Un Relevador de Sobrecorriente Con Capacidades Dinámicas de Ajuste en Redes Radiales de Distribuciónwashington castro canazaNessuna valutazione finora
- Principios de Entrada SalidaDocumento51 paginePrincipios de Entrada SalidaÁngel ZambranoNessuna valutazione finora
- Guia10undcimo2021 677Documento22 pagineGuia10undcimo2021 677Carlos Andres ZuluagaNessuna valutazione finora
- Protocolos de Comunicación IndustrialDocumento5 pagineProtocolos de Comunicación IndustrialaracfenixNessuna valutazione finora
- KRC 2 - Sistema de Robot - Release v4.1Documento23 pagineKRC 2 - Sistema de Robot - Release v4.1Nick RivieraNessuna valutazione finora
- Manipuladores Industriales II 13-05-06Documento24 pagineManipuladores Industriales II 13-05-06Enrique ReyeesNessuna valutazione finora
- Ae-Sa-C8-Ficha-Tecnica Central AguileraDocumento1 paginaAe-Sa-C8-Ficha-Tecnica Central AguileraVicent Montes MartiNessuna valutazione finora
- Taller DMA ArquitecturaDocumento9 pagineTaller DMA ArquitecturaSindy DevozNessuna valutazione finora