Potrebbero piacerti anche
- Estructura de CapítulosDocumento3 pagineEstructura de CapítulosTecSoft RiobambaNessuna valutazione finora
- Stanford Digital Transformation SpanishDocumento6 pagineStanford Digital Transformation SpanishSisInfo100% (1)
- Carta ResponsivaDocumento1 paginaCarta ResponsivaLore MartínezNessuna valutazione finora
- Puesta A Tierra en EdificiosDocumento63 paginePuesta A Tierra en Edificiosliligkjj100% (2)
- Ejempki Actividad II Parte 2Documento13 pagineEjempki Actividad II Parte 2liligkjjNessuna valutazione finora
- Lab 6 Estabilidad de Sistemas LinealesDocumento18 pagineLab 6 Estabilidad de Sistemas LinealesliligkjjNessuna valutazione finora
- Informe Inductancia IIDocumento11 pagineInforme Inductancia IIliligkjjNessuna valutazione finora
- Excel + VBA - Ejemplo de FacturaciónDocumento94 pagineExcel + VBA - Ejemplo de FacturaciónDavid Ocampo Gonzalez100% (5)
- Controlador Ziegler NicholsDocumento12 pagineControlador Ziegler NicholsSebastian BeltranNessuna valutazione finora
- 1 - Protocolo en La CorrespondenciaDocumento8 pagine1 - Protocolo en La CorrespondenciaJuan Pablo GaitanNessuna valutazione finora
- Controlador de Condensadores PowerIT C200ADocumento8 pagineControlador de Condensadores PowerIT C200AcrcruzpNessuna valutazione finora
- Ap 42Documento2 pagineAp 42Anonymous D9IrHGNessuna valutazione finora
- BGP: Border Gateway ProtocolDocumento5 pagineBGP: Border Gateway ProtocolDariks CalvoNessuna valutazione finora
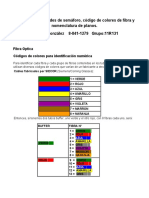
- Fibra Semaforo NomenclaturaDocumento3 pagineFibra Semaforo Nomenclaturaquiel166Nessuna valutazione finora
- Modulo Simulacion UnadDocumento163 pagineModulo Simulacion UnadOzzy MansonNessuna valutazione finora
- TEMA 15.intervención D.MOTORADocumento12 pagineTEMA 15.intervención D.MOTORAAlba ÁlvarezNessuna valutazione finora
- Actividades DescritasDocumento10 pagineActividades DescritasCarlos MarioNessuna valutazione finora
- Reglamento Interno Laboratorio ComputoDocumento1 paginaReglamento Interno Laboratorio ComputoTonyNessuna valutazione finora
- Implicante PrimoDocumento11 pagineImplicante PrimoAbner Mayhuay CaceresNessuna valutazione finora
- Calculo Practico de Un Sistema de Tierra ElectricaDocumento5 pagineCalculo Practico de Un Sistema de Tierra ElectricaMarco Montalvo VallejoNessuna valutazione finora
- Guia CCy DWSIMDocumento12 pagineGuia CCy DWSIMTn MontanaNessuna valutazione finora
- Secme-25335 1Documento81 pagineSecme-25335 1Darien MenaNessuna valutazione finora
- Test de Desempeño para JefesDocumento2 pagineTest de Desempeño para JefesAngeil Ramirez DelgadoNessuna valutazione finora
- Cgti-Cert - F02 PDFDocumento1 paginaCgti-Cert - F02 PDFANONYMOUS BlackNessuna valutazione finora
- Impri Dos Proyecto DigitalDocumento24 pagineImpri Dos Proyecto DigitalMayrita Eloisa TariraNessuna valutazione finora
- Elementos MultimediaDocumento10 pagineElementos MultimediaMarlon DiazNessuna valutazione finora
- PDFDocumento438 paginePDFguanatosNessuna valutazione finora
- ER A A: Leo MazzucchelliDocumento3 pagineER A A: Leo Mazzucchelligracielaalicia100% (1)
- POO y CLASES PDFDocumento26 paginePOO y CLASES PDFWillie BurbanoNessuna valutazione finora
- Diagrama de Causas-EfectoDocumento4 pagineDiagrama de Causas-EfectotuliapereaNessuna valutazione finora
- Evidencia 1 Presentación Caracterización de La EmpresaDocumento8 pagineEvidencia 1 Presentación Caracterización de La EmpresaLeonardo E. Paternina UribeNessuna valutazione finora
- Sube Archivos y Gana DineroDocumento16 pagineSube Archivos y Gana DineroCotri RonaldNessuna valutazione finora
- GUIA 05 - Formatos de DatosDocumento16 pagineGUIA 05 - Formatos de DatosCarla RN DNNessuna valutazione finora
- Cubos de KohsDocumento4 pagineCubos de Kohsapi-382106383% (6)