Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Teacher Induction Program Module 2Documento54 pagineTeacher Induction Program Module 2Acee Lagarto75% (8)
- Interpersonel Need of Management Student-Acilitor in The Choice of ElectivesDocumento180 pagineInterpersonel Need of Management Student-Acilitor in The Choice of ElectivesnerdjumboNessuna valutazione finora
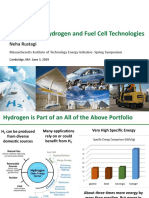
- 2019 MIT Energy Initiative Spring Symposium Presentation Neha RustagiDocumento24 pagine2019 MIT Energy Initiative Spring Symposium Presentation Neha RustagiDragomir GospodinovNessuna valutazione finora
- DR FC Professional Experiment Instructions en 1104Documento56 pagineDR FC Professional Experiment Instructions en 1104Dragomir GospodinovNessuna valutazione finora
- Modelling The Energy Release Process of Aftershocks: Gospodinov DDocumento8 pagineModelling The Energy Release Process of Aftershocks: Gospodinov DDragomir GospodinovNessuna valutazione finora
- PST Gospodinov-RotondiDocumento1 paginaPST Gospodinov-RotondiDragomir GospodinovNessuna valutazione finora
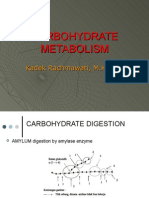
- Carbohydrate MetabolismDocumento38 pagineCarbohydrate Metabolismwidya nurrohmanNessuna valutazione finora
- Thesis Report FormatDocumento21 pagineThesis Report Formatsebsibe birhanuNessuna valutazione finora
- Dario Great Wall of China Lesson PlanDocumento3 pagineDario Great Wall of China Lesson Planapi-297914033Nessuna valutazione finora
- Structural Robustness of Steel Framed BuildingsDocumento0 pagineStructural Robustness of Steel Framed BuildingsCristina VlaicuNessuna valutazione finora
- Elena Alina Popa: Key StrengthsDocumento3 pagineElena Alina Popa: Key StrengthsElena Alina PopaNessuna valutazione finora
- FMD PPT For SeminarDocumento15 pagineFMD PPT For Seminarucantseeme0000Nessuna valutazione finora
- Kindergarten Weekly Lesson Plan TemplateDocumento2 pagineKindergarten Weekly Lesson Plan TemplateRobin Escoses MallariNessuna valutazione finora
- Viltam User Manual enDocumento13 pagineViltam User Manual enszol888Nessuna valutazione finora
- Rpi CM V1 - 1 Schematic PDFDocumento4 pagineRpi CM V1 - 1 Schematic PDFStephen J. RobertsNessuna valutazione finora
- Alliance PDFDocumento29 pagineAlliance PDFshekhar785424Nessuna valutazione finora
- Challenges To FreedomDocumento11 pagineChallenges To Freedomgerlie orqueNessuna valutazione finora
- Interview Feedback FormDocumento4 pagineInterview Feedback FormRohit HNessuna valutazione finora
- Active & Passive Voice Lesson Plan: Create A Cartoon in Active or Passive VoiceDocumento3 pagineActive & Passive Voice Lesson Plan: Create A Cartoon in Active or Passive VoiceHanie Balmedina-RazoNessuna valutazione finora
- BTS Lesson Preparation FormDocumento1 paginaBTS Lesson Preparation FormTsz Shing WONGNessuna valutazione finora
- Google Calendar Integrator - v2.0Documento21 pagineGoogle Calendar Integrator - v2.0Sumedh KakdeNessuna valutazione finora
- Samakande A UnprotectedDocumento190 pagineSamakande A Unprotectedathilla27Nessuna valutazione finora
- IBM Global Human Capital StudyDocumento72 pagineIBM Global Human Capital Studypraneeth.patlola100% (9)
- HOTS How To Answer QuestionsDocumento3 pagineHOTS How To Answer QuestionsEldad KarniNessuna valutazione finora
- Matthew Martin Resume 6-17-2009Documento1 paginaMatthew Martin Resume 6-17-2009mattyboync100% (2)
- Pages From ABB Power Factor Correction and Harmonic Filtering in Electrical PlantsDocumento7 paginePages From ABB Power Factor Correction and Harmonic Filtering in Electrical Plantsrajpre1213Nessuna valutazione finora
- The Science of Bonding From First To Sixth GenerationDocumento6 pagineThe Science of Bonding From First To Sixth GenerationRolzilah RohaniNessuna valutazione finora
- 2010-2011 CatalogDocumento339 pagine2010-2011 CatalogSimon TabNessuna valutazione finora
- Vessel Nozzle PDFDocumento30 pagineVessel Nozzle PDFEugenia LorenzaNessuna valutazione finora
- Alternative ADHD TreatmentDocumento3 pagineAlternative ADHD TreatmentCindy VanegasNessuna valutazione finora
- Indian Oil Corporation LTD Guwahati RefineryDocumento27 pagineIndian Oil Corporation LTD Guwahati Refineryelectram67% (6)
- Resistance To Change TQMDocumento11 pagineResistance To Change TQMAlex RiveraNessuna valutazione finora
- C2 - Linear ProgramingDocumento76 pagineC2 - Linear ProgramingLy LêNessuna valutazione finora
- Health Indicators DemographyDocumento35 pagineHealth Indicators DemographyZoe RodriguezNessuna valutazione finora