Potrebbero piacerti anche
- 2007 Saturn AURA Green Line Hybrid & 2008 Chevrolet Malibu HybridDocumento26 pagine2007 Saturn AURA Green Line Hybrid & 2008 Chevrolet Malibu Hybridlartsim115Nessuna valutazione finora
- How To Build A Tin Can Waveguide AntennaDocumento3 pagineHow To Build A Tin Can Waveguide AntennaAbid UmairNessuna valutazione finora
- 901-0602 Onan 12 & 24 Volt Battery Charger 305-0812 305-0813 Installation & Service Manual (05-2001)Documento16 pagine901-0602 Onan 12 & 24 Volt Battery Charger 305-0812 305-0813 Installation & Service Manual (05-2001)เกียรติศักดิ์ ภูมิลา100% (2)
- EVTV Pierburg CWA-50 Coolant Pump Specs and TestingDocumento3 pagineEVTV Pierburg CWA-50 Coolant Pump Specs and TestingHarold TheHelicopter100% (4)
- Dynamic Modeling and Simulation Analysis On Micro-Grid Based On DIgSILENTDocumento6 pagineDynamic Modeling and Simulation Analysis On Micro-Grid Based On DIgSILENTjano_rdr100% (1)
- Worksheet On Magnetic Field Mapping RevisedDocumento1 paginaWorksheet On Magnetic Field Mapping RevisedglzrioNessuna valutazione finora
- MicrogridDocumento4 pagineMicrogridSruthydileep0% (1)
- Power Control of DC Microgrid With Variable Generation and Energy StorageDocumento5 paginePower Control of DC Microgrid With Variable Generation and Energy StorageSEP-PublisherNessuna valutazione finora
- 38.electrical - IJEEER - Bi - Directional Grid-Connected - Sravan KumarDocumento10 pagine38.electrical - IJEEER - Bi - Directional Grid-Connected - Sravan KumarTJPRC PublicationsNessuna valutazione finora
- A New Design of Control & Power Management Strategies of Hybrid Ac-Dc Microgrids Toward High Power QualityDocumento10 pagineA New Design of Control & Power Management Strategies of Hybrid Ac-Dc Microgrids Toward High Power QualityPayalNessuna valutazione finora
- Stability Analysis of Supercapacitor Based DC Microgrid System With Energy StorageDocumento4 pagineStability Analysis of Supercapacitor Based DC Microgrid System With Energy StorageNtokozo HlatshwayoNessuna valutazione finora
- Analysis of Voltage Droop Control for dc MicrogridsDocumento6 pagineAnalysis of Voltage Droop Control for dc MicrogridsJohn BihagNessuna valutazione finora
- MicrogridDocumento11 pagineMicrogridrajiv kundalaNessuna valutazione finora
- 5.11 Microgrid Protection and Control (T-18)Documento4 pagine5.11 Microgrid Protection and Control (T-18)MuruganNessuna valutazione finora
- Analysis of Voltage Droop Control Method For DC Microgrids With Simulink: Modelling and SimulationDocumento6 pagineAnalysis of Voltage Droop Control Method For DC Microgrids With Simulink: Modelling and SimulationAnkit MishraNessuna valutazione finora
- Backup Power WhitepaperDocumento6 pagineBackup Power Whitepaperpaohung linNessuna valutazione finora
- Base PaperDocumento5 pagineBase PaperVinay BhardwajNessuna valutazione finora
- Modelling and Simulation of A Solar PV and Battery Based DC Microgrid SystemDocumento6 pagineModelling and Simulation of A Solar PV and Battery Based DC Microgrid SystemMaheshNessuna valutazione finora
- AC EditedDocumento22 pagineAC EditedEmmanuel Ayodele DavidNessuna valutazione finora
- DC Microgrid 2Documento7 pagineDC Microgrid 2Jakdaksh HarshNessuna valutazione finora
- Energies 05 03425Documento6 pagineEnergies 05 03425Madhav SharmaNessuna valutazione finora
- Single-Phase Seven-Level Grid-Connected Inverter For Photovoltaic SystemDocumento7 pagineSingle-Phase Seven-Level Grid-Connected Inverter For Photovoltaic Systemanil kasotNessuna valutazione finora
- Grid-Integrated Industrial Motors-Driven Solar Water Pump With Power Flow Management1Documento5 pagineGrid-Integrated Industrial Motors-Driven Solar Water Pump With Power Flow Management1Editor in ChiefNessuna valutazione finora
- A Control Strategy For Power Management of An Isolated Micro Hydro-PV-Battery Hybrid Energy SystemDocumento5 pagineA Control Strategy For Power Management of An Isolated Micro Hydro-PV-Battery Hybrid Energy Systemlaap85Nessuna valutazione finora
- Interactive DG Interface for Flexible Micro-Grid OperationDocumento10 pagineInteractive DG Interface for Flexible Micro-Grid OperationahmedrizwanchampNessuna valutazione finora
- Operation and Protection of 380V DCDocumento6 pagineOperation and Protection of 380V DCmusharraf saeedNessuna valutazione finora
- Micro Grid: 3.1 Architecture of MicrogridDocumento21 pagineMicro Grid: 3.1 Architecture of MicrogridAnelis KangujamNessuna valutazione finora
- PDFDocumento9 paginePDFmanoj kumarNessuna valutazione finora
- Hierarchical Control of DC MicrogridDocumento5 pagineHierarchical Control of DC MicrogridsudeepNessuna valutazione finora
- Energy Management Control Algorithm Based Bidirectional DC-DC Converter For Small Scale Micro Grid With Hybrid Storage SystemDocumento9 pagineEnergy Management Control Algorithm Based Bidirectional DC-DC Converter For Small Scale Micro Grid With Hybrid Storage SystemRamsathayaNessuna valutazione finora
- Photo Voltaic PanelDocumento18 paginePhoto Voltaic Panelrajesh kumarNessuna valutazione finora
- 1final Iete - Forth Revision1Documento10 pagine1final Iete - Forth Revision1Dr. Monika JainNessuna valutazione finora
- Survey On Microgrid Control Strategies: Energy ProcediaDocumento7 pagineSurvey On Microgrid Control Strategies: Energy Procediasureh32Nessuna valutazione finora
- GridDocumento6 pagineGridgiongan342Nessuna valutazione finora
- Ee 1055 (May) - 1-2Documento2 pagineEe 1055 (May) - 1-2sowmiyaNessuna valutazione finora
- 9 04348113 PDFDocumento8 pagine9 04348113 PDFJitender KaushalNessuna valutazione finora
- Energies: Development of Grid-Connected Inverter Experiment Modules For Microgrid LearningDocumento16 pagineEnergies: Development of Grid-Connected Inverter Experiment Modules For Microgrid LearningJuan Manuel Ríos FrancoNessuna valutazione finora
- Novel Protection Schema For A Radial Microgrid SystemDocumento6 pagineNovel Protection Schema For A Radial Microgrid SystempouyanNessuna valutazione finora
- Energy Management Control of Hybrid Power System With Smes Battery As Energy StorageDocumento18 pagineEnergy Management Control of Hybrid Power System With Smes Battery As Energy StorageShaniba TPNessuna valutazione finora
- DC-Bus Voltage Regulation and Power Compensation With Bi-Directional Inverter in DC-Microgrid ApplicationsDocumento8 pagineDC-Bus Voltage Regulation and Power Compensation With Bi-Directional Inverter in DC-Microgrid ApplicationsAbi Yusuf AuliaNessuna valutazione finora
- EE403: Distributed Generation and Smart Grid Previous Year Question PaperDocumento11 pagineEE403: Distributed Generation and Smart Grid Previous Year Question PaperShravan SajNessuna valutazione finora
- Grid Integration of Hybrid Renewable Energy System Using Versatile Matrix ConverterDocumento6 pagineGrid Integration of Hybrid Renewable Energy System Using Versatile Matrix ConverterChetan GhatageNessuna valutazione finora
- A Hybrid ACDC Microgrid and ItsDocumento9 pagineA Hybrid ACDC Microgrid and ItsSivareddy MudiyalaNessuna valutazione finora
- CAN Based Grid Synchronisation Technique of A Micro Grid With Renewable SourceDocumento4 pagineCAN Based Grid Synchronisation Technique of A Micro Grid With Renewable SourceAstrid BelloNessuna valutazione finora
- Control of Power Converters For Microgrids: I. Vechiu, A. Llaria, O. Curea and H. CamblongDocumento6 pagineControl of Power Converters For Microgrids: I. Vechiu, A. Llaria, O. Curea and H. Camblongmohd786azharNessuna valutazione finora
- Preview AC155EDocumento2 paginePreview AC155ESafi Zabihullah SafiNessuna valutazione finora
- Advantages of DC MicrogridDocumento6 pagineAdvantages of DC MicrogridMuhammad AtiqNessuna valutazione finora
- Optimal MigridsDocumento5 pagineOptimal MigridselecandresNessuna valutazione finora
- Energy Management in Islanded DC Microgrid Using Fuzzy Controller To Improve Battery PerformanceDocumento6 pagineEnergy Management in Islanded DC Microgrid Using Fuzzy Controller To Improve Battery PerformanceVelid ÇelikNessuna valutazione finora
- A Novel IntegratedDocumento2 pagineA Novel IntegratedshanofaNessuna valutazione finora
- Hierarchical Coordinated Control of DC Microgrid With Wind TurbinesDocumento6 pagineHierarchical Coordinated Control of DC Microgrid With Wind TurbinesJakdaksh HarshNessuna valutazione finora
- A Grid Interface Current Control Strategy For DC MicrogridsDocumento8 pagineA Grid Interface Current Control Strategy For DC MicrogridsPradeep Kumar SahuNessuna valutazione finora
- Power Quality Enhanced Operation and Control of A Microgrid Based Custom Power ParkDocumento7 paginePower Quality Enhanced Operation and Control of A Microgrid Based Custom Power ParkIkhwanJackNessuna valutazione finora
- Bidirectional DC-DC Converter in Solar PV System For Battery Charging ApplicationDocumento4 pagineBidirectional DC-DC Converter in Solar PV System For Battery Charging Applicationعبدالرحمن المالكيNessuna valutazione finora
- A PV Module-Integrated Inverter Using A Ćuk Converter in DCM With Island Detection SchemeDocumento6 pagineA PV Module-Integrated Inverter Using A Ćuk Converter in DCM With Island Detection Schemegrasia77Nessuna valutazione finora
- Reactive Power Flow Control of Grid Tie Inverter To Enhance The Stability of Power GridDocumento8 pagineReactive Power Flow Control of Grid Tie Inverter To Enhance The Stability of Power GridAsraButoolNessuna valutazione finora
- Modeling and Simulation of Micro Grid System Based On Renewable Power Generation Units by Using Multilevel ConverterDocumento5 pagineModeling and Simulation of Micro Grid System Based On Renewable Power Generation Units by Using Multilevel ConverterPidikiti Surendra BabuNessuna valutazione finora
- Voltage Control of A Hybrid AC/DC Microgrid in Stand-Alone Operation ModeDocumento5 pagineVoltage Control of A Hybrid AC/DC Microgrid in Stand-Alone Operation ModeSơn PhạmNessuna valutazione finora
- 7 Decentralized Load Sharing in A Low-Voltage Direct Current Microgrid With An Adaptive Droop Approach Based On A Superimposed FrequencyDocumento11 pagine7 Decentralized Load Sharing in A Low-Voltage Direct Current Microgrid With An Adaptive Droop Approach Based On A Superimposed FrequencyShubham PrajapatiNessuna valutazione finora
- 05 2016-3-6-pp.27-34Documento8 pagine05 2016-3-6-pp.27-34Meisha desionasistaNessuna valutazione finora
- Modelling and Co-Ordination Control of Hybrid Grid: S. Lakshmi Devi K. SudheerDocumento8 pagineModelling and Co-Ordination Control of Hybrid Grid: S. Lakshmi Devi K. SudheerAdriano NavarroNessuna valutazione finora
- Voltage Dip's Mitigation During PV-Grid-Connection Using STATCOMDocumento7 pagineVoltage Dip's Mitigation During PV-Grid-Connection Using STATCOMMohammedSaeedNessuna valutazione finora
- Active Compensation Technique For Converter-Fed AC MicrogridsDocumento5 pagineActive Compensation Technique For Converter-Fed AC MicrogridserpublicationNessuna valutazione finora
- Power Flow and Fault Analysis in Smart Grid Systems: Zain SikanderDocumento4 paginePower Flow and Fault Analysis in Smart Grid Systems: Zain SikanderSyed Asad ShahNessuna valutazione finora
- Installation and Operating Instructions 1VDD005976 GB - 8Documento24 pagineInstallation and Operating Instructions 1VDD005976 GB - 8Vivek KakkothNessuna valutazione finora
- 11 000 Measuring Equipment SummaryDocumento38 pagine11 000 Measuring Equipment SummaryAdrian GarciaNessuna valutazione finora
- Repair Ballast Power Supply UnitsDocumento4 pagineRepair Ballast Power Supply UnitsSandro Da Cunha TrindadeNessuna valutazione finora
- Mitsubishi MCCB v2Documento63 pagineMitsubishi MCCB v2Julio Perez RodriguezNessuna valutazione finora
- Regulation 2015Documento8 pagineRegulation 2015syed althafNessuna valutazione finora
- Observation of Force and Torque On A Current Loop Using A Simplified Electric MotorDocumento3 pagineObservation of Force and Torque On A Current Loop Using A Simplified Electric Motorfrances leana capellan100% (2)
- Ericsson Minilink TN R4Documento15 pagineEricsson Minilink TN R4Ebenezer AnnanNessuna valutazione finora
- Paper 1 June 2008Documento20 paginePaper 1 June 2008Arushad AhmedNessuna valutazione finora
- Long Line Application CARRIER-R22Documento52 pagineLong Line Application CARRIER-R22Bruce OreNessuna valutazione finora
- Quick Start PF70Documento18 pagineQuick Start PF70selvan_rsk761Nessuna valutazione finora
- 7 True/False Questions: Name: ScoreDocumento4 pagine7 True/False Questions: Name: ScoreAtharv GandhiNessuna valutazione finora
- Cable specifications for South Africa divisionDocumento12 pagineCable specifications for South Africa divisionDave CNessuna valutazione finora
- MAGMA2012 CommitteeDocumento9 pagineMAGMA2012 CommitteeTejaswi NisanthNessuna valutazione finora
- Homework 1Documento3 pagineHomework 1Shaban Malik100% (1)
- XL4005 Xlsemi PDFDocumento9 pagineXL4005 Xlsemi PDFMario Karma LeivaNessuna valutazione finora
- Isc 2SD998: Silicon NPN Power TransistorDocumento2 pagineIsc 2SD998: Silicon NPN Power TransistorDjoNessuna valutazione finora
- Triac: From Wikipedia, The Free EncyclopediaDocumento7 pagineTriac: From Wikipedia, The Free EncyclopediaLovleenNessuna valutazione finora
- Limiting Circuits Experiment GuideDocumento31 pagineLimiting Circuits Experiment Guideعبدالرحمن النويصرNessuna valutazione finora
- Pro Slate 12 DisassemblyDocumento7 paginePro Slate 12 DisassemblyDan GriffithsNessuna valutazione finora
- Permanent Magnet DC Motor With Planetary Gearhead PerformaxDocumento5 paginePermanent Magnet DC Motor With Planetary Gearhead PerformaxMario Arturo RendonNessuna valutazione finora
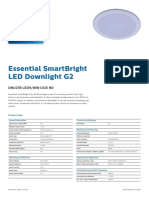
- Lighting Lighting: Essential Smartbright Led Downlight G2Documento3 pagineLighting Lighting: Essential Smartbright Led Downlight G2richard sinagaNessuna valutazione finora
- Prismatic Compass (Extra Note)Documento7 paginePrismatic Compass (Extra Note)Debra DeirdreNessuna valutazione finora
- AbsolyteGP PDFDocumento12 pagineAbsolyteGP PDFedin PopNessuna valutazione finora
- The "Strain-Gauge Thermocouple": A Novel Device For Simultaneous Strain and Temperature MeasurementDocumento6 pagineThe "Strain-Gauge Thermocouple": A Novel Device For Simultaneous Strain and Temperature MeasurementFrontiersNessuna valutazione finora
- Summary of EN55011 - IsM Radio Frequency EquipmentDocumento3 pagineSummary of EN55011 - IsM Radio Frequency EquipmentCharles HoNessuna valutazione finora