Potrebbero piacerti anche
- Formulas LaplaceDocumento3 pagineFormulas LaplaceBrenda CruzNessuna valutazione finora
- Clase I Unidad IIIDocumento9 pagineClase I Unidad IIIRicardo Andres Del Aguila FloresNessuna valutazione finora
- Transformadas de LaplaceDocumento16 pagineTransformadas de LaplaceAMERICO VICTORIO ANTICONANessuna valutazione finora
- Dominios Ejerc ResueltosDocumento2 pagineDominios Ejerc ResueltosJim AcuñaNessuna valutazione finora
- Clase 7 Unidad IDocumento8 pagineClase 7 Unidad IGa ParicioNessuna valutazione finora
- Transformada de LaplaceDocumento20 pagineTransformada de LaplaceRich Contreras CruzNessuna valutazione finora
- Aplicaciones de Las Series de Fourier en El Análisis de Sistemas LinealesDocumento6 pagineAplicaciones de Las Series de Fourier en El Análisis de Sistemas LinealesDaniel SarabiaNessuna valutazione finora
- Repaso Calculo Ii SeriesDocumento7 pagineRepaso Calculo Ii SeriesDelia CastilloNessuna valutazione finora
- Ejercicios 1, 2, 3, 5.Documento10 pagineEjercicios 1, 2, 3, 5.Marly Yulieth NuñezNessuna valutazione finora
- Formulas Básicas de Integración Métodos de IntegraciónDocumento3 pagineFormulas Básicas de Integración Métodos de IntegraciónRikelme HernandezNessuna valutazione finora
- CuestionarioDocumento5 pagineCuestionarioraul hernandezNessuna valutazione finora
- Proyecto Final MatematicaDocumento15 pagineProyecto Final MatematicaJeanPhillipsKNessuna valutazione finora
- Cálculo Integral Sem 2Documento8 pagineCálculo Integral Sem 2Fernanda EscalanteNessuna valutazione finora
- Transformada de Una Derivada y Derivada de Una TransformadaDocumento29 pagineTransformada de Una Derivada y Derivada de Una TransformadaLUIS ANTONIO OROCIO PEREZNessuna valutazione finora
- Ejemplos. TFDocumento14 pagineEjemplos. TFKevin SanchezNessuna valutazione finora
- Plantilla Arreglar FancyDocumento10 paginePlantilla Arreglar FancyCamilo SanabriaNessuna valutazione finora
- S13areascoordenadaspolares2023 IIUNACDocumento34 pagineS13areascoordenadaspolares2023 IIUNACJean HuarcayaNessuna valutazione finora
- Apoyo Eje 2 2022 1Documento22 pagineApoyo Eje 2 2022 1Jhonnier Sebastian Sanchez BenitezNessuna valutazione finora
- 1ra Sesión Cálculo IntegralDocumento10 pagine1ra Sesión Cálculo IntegralJezer FgdNessuna valutazione finora
- ParametroDocumento14 pagineParametroTania DueñasNessuna valutazione finora
- EsferaDocumento15 pagineEsferaGabriela Gemio Lujan50% (2)
- Integrales Por Sustitución Algebraica TeoríaDocumento2 pagineIntegrales Por Sustitución Algebraica TeoríaFernando Ramos GarcíaNessuna valutazione finora
- La Transformada de Laplace Exposición (Real)Documento27 pagineLa Transformada de Laplace Exposición (Real)edwards edrdsNessuna valutazione finora
- S2int - Por Partes - Trigo-2022-IDocumento54 pagineS2int - Por Partes - Trigo-2022-IQUICHIZ DEZA GIANCARLONessuna valutazione finora
- Presentación Unidad 1. Parte 2Documento12 paginePresentación Unidad 1. Parte 2ANAID NAVANessuna valutazione finora
- Mamt2 U4 A2 RaicDocumento4 pagineMamt2 U4 A2 RaicRaúl SánchezNessuna valutazione finora
- Ejercicios 4,7,10Documento5 pagineEjercicios 4,7,10oscartvgarciaNessuna valutazione finora
- Solución Taller Sumativo 3 P117cuvDocumento6 pagineSolución Taller Sumativo 3 P117cuvKevin BajañaNessuna valutazione finora
- Transformada de LaplaceDocumento8 pagineTransformada de LaplaceDaniel Zambra ZambraNessuna valutazione finora
- Anexo 5 - Plantilla Entrega Tarea 3 - Yeison MesaDocumento14 pagineAnexo 5 - Plantilla Entrega Tarea 3 - Yeison MesaGENNY URIBENessuna valutazione finora
- U.a.4. Calculo IiDocumento10 pagineU.a.4. Calculo IiSofia ReyesNessuna valutazione finora
- ECM-desigualdad de Bessel - Identidad de ParsevalDocumento27 pagineECM-desigualdad de Bessel - Identidad de ParsevalAlejandro Delgado ChaconNessuna valutazione finora
- Técnicas de Integración.Documento29 pagineTécnicas de Integración.luanna rojas layzaNessuna valutazione finora
- Mamt2 U4 A2 JomeDocumento5 pagineMamt2 U4 A2 Jomejuan meza100% (2)
- Tema 3 Leccion 2 PDFDocumento12 pagineTema 3 Leccion 2 PDFCarlos LeonNessuna valutazione finora
- Solución EPDocumento4 pagineSolución EPXIOMI JHISIAN PADILLA VELANessuna valutazione finora
- Mamt2 U4 A2 LapbDocumento10 pagineMamt2 U4 A2 LapbLaura Pontón BecerrilNessuna valutazione finora
- TEOREMA DE RESIDUO EjercicioDocumento2 pagineTEOREMA DE RESIDUO EjercicioCristian CarrilloNessuna valutazione finora
- Ejercicios Teoria de ControlDocumento15 pagineEjercicios Teoria de ControlFreddy ChimboNessuna valutazione finora
- Material de Termino Algebraico y Polinomios EspecialesDocumento13 pagineMaterial de Termino Algebraico y Polinomios EspecialesTHZZ BLAKENessuna valutazione finora
- Tarea3 Grupo33Documento24 pagineTarea3 Grupo33Gustavo Adolfo Herrera SilvaNessuna valutazione finora
- Tabla de LaplaceDocumento2 pagineTabla de LaplaceRenzoNessuna valutazione finora
- Cálculo Integral Sem 4Documento25 pagineCálculo Integral Sem 4Fernanda EscalanteNessuna valutazione finora
- Convergencia AceleradaDocumento3 pagineConvergencia AceleradabryggyttNessuna valutazione finora
- Funciones VectorialesDocumento81 pagineFunciones VectorialesEsteban LopezNessuna valutazione finora
- Unidad 2 Series y SucesionesDocumento29 pagineUnidad 2 Series y Sucesionesjesus david arteaga hernandezNessuna valutazione finora
- Clase 3 Ecuaciones Exactas y No ExactasDocumento6 pagineClase 3 Ecuaciones Exactas y No ExactasShinya TanakaNessuna valutazione finora
- Mamt2 U2 Ea RaicDocumento7 pagineMamt2 U2 Ea RaicRaúl SánchezNessuna valutazione finora
- Integración de Funciones Irracionales ElementalesDocumento14 pagineIntegración de Funciones Irracionales ElementalesmaycolNessuna valutazione finora
- EDI-CAP 04 - Transformada de LaplaceDocumento19 pagineEDI-CAP 04 - Transformada de LaplaceAlessandra Canterac RamosNessuna valutazione finora
- Mamt2 U4 Ea LapbDocumento11 pagineMamt2 U4 Ea LapbLaura Pontón Becerril100% (1)
- Guía DerivadasDocumento16 pagineGuía DerivadasWendy BolivarNessuna valutazione finora
- Cálculo Integral Eje 1-1Documento55 pagineCálculo Integral Eje 1-1dianaroman1982Nessuna valutazione finora
- S11 PTFCySTFC TFC (2023II)Documento33 pagineS11 PTFCySTFC TFC (2023II)Jean HuarcayaNessuna valutazione finora
- El Cálculo Integral, Se Basa en El Proceso Inverso de La Derivación Llado Integración, También Reconocida Como Anti-DerivadaDocumento9 pagineEl Cálculo Integral, Se Basa en El Proceso Inverso de La Derivación Llado Integración, También Reconocida Como Anti-DerivadaAnahi SeguraNessuna valutazione finora
- Curso básico de teoría de númerosDa EverandCurso básico de teoría de númerosValutazione: 5 su 5 stelle5/5 (2)
- FARM-PROYECTO-tesis - PATRICIA YPINCE LEYVADocumento33 pagineFARM-PROYECTO-tesis - PATRICIA YPINCE LEYVAF AGNessuna valutazione finora
- TEOREMA DEL SÁNDWICH (Exposición Grupo5)Documento14 pagineTEOREMA DEL SÁNDWICH (Exposición Grupo5)F AGNessuna valutazione finora
- Ecuaciones Diferenciales Clase 01Documento5 pagineEcuaciones Diferenciales Clase 01F AGNessuna valutazione finora
- Estudio de Las Aplicaciones Del Análisis Matricial en La Obtención de La Matriz de Rigidez de Un Pórtico PlanoDocumento24 pagineEstudio de Las Aplicaciones Del Análisis Matricial en La Obtención de La Matriz de Rigidez de Un Pórtico PlanoF AGNessuna valutazione finora
- Teorema Del SándwichDocumento14 pagineTeorema Del SándwichF AGNessuna valutazione finora
- Introduccion A La Ingenieria CivilDocumento8 pagineIntroduccion A La Ingenieria CivilF AGNessuna valutazione finora
- Trabajo Modulo 3Documento17 pagineTrabajo Modulo 3F AGNessuna valutazione finora
- Informe de Plan de Tesis Delvis MoralesDocumento2 pagineInforme de Plan de Tesis Delvis MoralesF AGNessuna valutazione finora
- Capitulo-4 LosasDocumento159 pagineCapitulo-4 LosasF AGNessuna valutazione finora
- Capitulo-1 Estructuración y Comportamiento de Estructuras Frente A SismoDocumento152 pagineCapitulo-1 Estructuración y Comportamiento de Estructuras Frente A SismoF AGNessuna valutazione finora
- Trabajo 3er Modulo Ramos EspinozaDocumento26 pagineTrabajo 3er Modulo Ramos EspinozaF AGNessuna valutazione finora
- Ejercicio - Cuerda VibranteDocumento5 pagineEjercicio - Cuerda VibranteF AGNessuna valutazione finora
- RAMOS ESPINOZA Practica 3ermoDocumento4 pagineRAMOS ESPINOZA Practica 3ermoF AGNessuna valutazione finora
- Vectores Tema 02Documento28 pagineVectores Tema 02F AGNessuna valutazione finora
- Losas Armadas en Un Solo Sentido AlasDocumento10 pagineLosas Armadas en Un Solo Sentido AlasF AGNessuna valutazione finora
- Ejercicio - EDP de OndaDocumento5 pagineEjercicio - EDP de OndaF AGNessuna valutazione finora
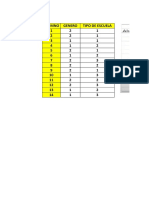
- Ejemplo de Chi Cuadrado-Genero-Tipo de EscuelaDocumento2 pagineEjemplo de Chi Cuadrado-Genero-Tipo de EscuelaF AGNessuna valutazione finora
- Analisis Matematico I Ing InformaticaDocumento11 pagineAnalisis Matematico I Ing InformaticaF AGNessuna valutazione finora
- Edo Ing InformaticaDocumento15 pagineEdo Ing InformaticaF AGNessuna valutazione finora
- Nuevo ZapperDocumento2 pagineNuevo Zappertrm915572Nessuna valutazione finora
- Matemáticas Grado 8 2021 DOCENTE: Miguel Antonio Aguilar EspinelDocumento9 pagineMatemáticas Grado 8 2021 DOCENTE: Miguel Antonio Aguilar Espineljuan roaNessuna valutazione finora
- Auditoria Ambiental UagrmDocumento24 pagineAuditoria Ambiental UagrmJose Mampaso100% (2)
- Eje 3 Saber ConocerDocumento21 pagineEje 3 Saber ConocerJohnatan Martinez SolanoNessuna valutazione finora
- Normas Internacionales de Contabilidad Subir Aula Contabilidad 1Documento61 pagineNormas Internacionales de Contabilidad Subir Aula Contabilidad 1ANALFI GOMEZNessuna valutazione finora
- Boleta para ConducirDocumento2 pagineBoleta para ConducirAlmiron GracielaNessuna valutazione finora
- Sesión Ce, CiDocumento11 pagineSesión Ce, CiOscar Mario Lacuta QuispeNessuna valutazione finora
- Bomba DAB PDFDocumento70 pagineBomba DAB PDFMiguel Mendez HerreraNessuna valutazione finora
- Redes de Telefonia CelularDocumento51 pagineRedes de Telefonia CelularJose MandrakeNessuna valutazione finora
- Cts CASOS PRACTICOSDocumento8 pagineCts CASOS PRACTICOSAlejandro Gianmarco Miranda PanioraNessuna valutazione finora
- Esto Ya Existio en La AntiguedadDocumento217 pagineEsto Ya Existio en La AntiguedadAriel VerduzNessuna valutazione finora
- Guia de Aprendizaje - EmprendimientoDocumento8 pagineGuia de Aprendizaje - Emprendimientojaider arteagaNessuna valutazione finora
- Formato Portafolio Docente MATEMATICADocumento55 pagineFormato Portafolio Docente MATEMATICAPauly ValleNessuna valutazione finora
- Fuente Dc. Laboratorio CircuitosDocumento4 pagineFuente Dc. Laboratorio CircuitosJunior ALdair Andrade SiancasNessuna valutazione finora
- Modulo 1 Registros Akáshicos BeoneDocumento38 pagineModulo 1 Registros Akáshicos BeoneAlejandro Fabian ZarateNessuna valutazione finora
- Gestion de Administracion TR1 .Documento11 pagineGestion de Administracion TR1 .Pablito Huaman Yachas50% (2)
- Ambientes de AprendizajeDocumento5 pagineAmbientes de AprendizajeCristhian SalazarNessuna valutazione finora
- Dia-1 5to Grado - 22 de NoviembreDocumento4 pagineDia-1 5to Grado - 22 de NoviembreDiego Estefano Pichihua CarreraNessuna valutazione finora
- Ensayo Película VictoriosoDocumento4 pagineEnsayo Película VictoriosoCeleste SánchezNessuna valutazione finora
- VF Declaración 2701 Isapres de ChileDocumento1 paginaVF Declaración 2701 Isapres de ChileContacto Ex-AnteNessuna valutazione finora
- Comentario de AristótelesDocumento2 pagineComentario de AristótelesHeyy8Nessuna valutazione finora
- Provision de Servicios y Equipos de AT para MaestrosDocumento56 pagineProvision de Servicios y Equipos de AT para MaestrosMarisol Martinez VegaNessuna valutazione finora
- Bases Quimicas de La HerenciaDocumento38 pagineBases Quimicas de La HerenciaRony Huañec MedinaNessuna valutazione finora
- Investigación MicrosocialDocumento17 pagineInvestigación MicrosocialMynor MartínezNessuna valutazione finora
- Tarea 5 - Apropiacion de Conceptos Economicos - Eduar SanchezDocumento9 pagineTarea 5 - Apropiacion de Conceptos Economicos - Eduar SanchezAnnie GonzalesNessuna valutazione finora
- Condor Am-14Documento1 paginaCondor Am-14WiilmerRonaldoPinzonNessuna valutazione finora
- Polinomios2Documento2 paginePolinomios2sebastian rojasNessuna valutazione finora
- GPM de Un Gas NaturalDocumento3 pagineGPM de Un Gas Naturalginozky100% (1)
- Fusibles KIA Picanto 2012-2015Documento14 pagineFusibles KIA Picanto 2012-2015l98519171Nessuna valutazione finora
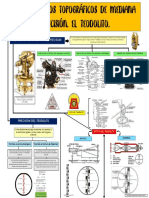
- Mapa Conceptual 6 de TopografiaDocumento1 paginaMapa Conceptual 6 de TopografiaAldair PMNessuna valutazione finora