Potrebbero piacerti anche
- Bartch 4 UrduDocumento1 paginaBartch 4 Urduzt8271327Nessuna valutazione finora
- IFR Regulations Quick Reference: Pilot CurrencyDocumento2 pagineIFR Regulations Quick Reference: Pilot CurrencyJohnNessuna valutazione finora
- Dokumen - Tips - MML HR Servo 12 L 13 MML HR Series MML HR Series MML HR Series MML High ResolutionDocumento2 pagineDokumen - Tips - MML HR Servo 12 L 13 MML HR Series MML HR Series MML HR Series MML High ResolutionsandraNessuna valutazione finora
- QFD TesisDocumento1 paginaQFD TesisGabriel VazquezNessuna valutazione finora
- Nano BiotechnologyDocumento24 pagineNano BiotechnologySanj AravNessuna valutazione finora
- 05 Robotics Multiagent ProrokDocumento56 pagine05 Robotics Multiagent ProrokQuan FangNessuna valutazione finora
- Combi SC Straddle Carrier PDFDocumento2 pagineCombi SC Straddle Carrier PDFjakeNessuna valutazione finora
- Classroom Instruction Delivery Alignment Map - Applied EconomicsDocumento7 pagineClassroom Instruction Delivery Alignment Map - Applied EconomicsAnne ReshierNessuna valutazione finora
- Binham Electro Mechanical Ent.L.L.C: Hse Training MatrixDocumento1 paginaBinham Electro Mechanical Ent.L.L.C: Hse Training MatrixgkNessuna valutazione finora
- Designing With Plastics and Composites A Handbook PDFDocumento984 pagineDesigning With Plastics and Composites A Handbook PDFlogonwheeler100% (1)
- Provincial PopulationDocumento1 paginaProvincial PopulationRHU ALCALANessuna valutazione finora
- SAP S4 HANA MM CertificationDocumento1 paginaSAP S4 HANA MM CertificationYong Benedict100% (4)
- 1.S4 MM Flow DetailedDocumento1 pagina1.S4 MM Flow DetailedPrakash Praky100% (1)
- GrammarAssessmentMatrix PDFDocumento2 pagineGrammarAssessmentMatrix PDFpretywomnNessuna valutazione finora
- Grammar Assessment MatrixDocumento2 pagineGrammar Assessment MatrixSamori CamaraNessuna valutazione finora
- Matrix History Training MaintenanceDocumento2 pagineMatrix History Training MaintenanceReza SyailendraNessuna valutazione finora
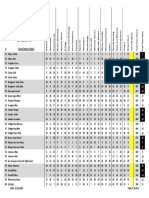
- 2018 Bay Area Regional Science Olympiad Tournament: # School Name (State)Documento1 pagina2018 Bay Area Regional Science Olympiad Tournament: # School Name (State)Baguette BubblesNessuna valutazione finora
- Industrial Network Security Monitoring - ICS - NSM - POSTERDocumento2 pagineIndustrial Network Security Monitoring - ICS - NSM - POSTERAni MNessuna valutazione finora
- Q2Documento4 pagineQ2Lai Chai HuiNessuna valutazione finora
- Talent LMS Mindmap by Bi - DrawioDocumento1 paginaTalent LMS Mindmap by Bi - DrawioXuan BinhNessuna valutazione finora
- Pmi Acp Book Mind Map 1Documento1 paginaPmi Acp Book Mind Map 1pallavjulkaNessuna valutazione finora
- 7580 To 7640-ModelDocumento1 pagina7580 To 7640-ModelpopemiNessuna valutazione finora
- 7340 To 7400-ModelDocumento1 pagina7340 To 7400-ModelpopemiNessuna valutazione finora
- Description: Tags: Perf Fy2005Documento67 pagineDescription: Tags: Perf Fy2005anon-616190Nessuna valutazione finora
- 企业能力成熟度模型enterprise competency maturity modelDocumento1 pagina企业能力成熟度模型enterprise competency maturity modelisolongNessuna valutazione finora
- All FrameworksDocumento1 paginaAll FrameworksArnav RoyNessuna valutazione finora
- 1660 To 1720-ModelDocumento1 pagina1660 To 1720-ModelpopemiNessuna valutazione finora
- Concept Map - FreudDocumento1 paginaConcept Map - FreudcandybyunNessuna valutazione finora
- Customer Base Management NTCDocumento12 pagineCustomer Base Management NTChanaaNessuna valutazione finora
- Tutorial MetaheuristicsDocumento131 pagineTutorial MetaheuristicsLuis Alberto ChaconNessuna valutazione finora
- Huaweigpon PDFDocumento1 paginaHuaweigpon PDFRobNessuna valutazione finora
- RDocumento1 paginaRАртём ПустовойNessuna valutazione finora
- LED SCADA Display 40": Dell Optip Lex 790Documento14 pagineLED SCADA Display 40": Dell Optip Lex 790leorio88Nessuna valutazione finora
- Ti Objecti Ve Optimization Evolutinary Computation: Module 1: Introduction To OptimizationDocumento15 pagineTi Objecti Ve Optimization Evolutinary Computation: Module 1: Introduction To OptimizationShreshta JainNessuna valutazione finora
- TNA JobsiteDocumento1 paginaTNA JobsiteWildan NuzulaNessuna valutazione finora
- Ecossistema-Martech & AdtechDocumento1 paginaEcossistema-Martech & AdtechGuilherme HepperNessuna valutazione finora
- MPLS Traffic Engineering Mindmap PDF 1620498187Documento1 paginaMPLS Traffic Engineering Mindmap PDF 1620498187chandhra deepakNessuna valutazione finora
- Scan 16 Sep 2020Documento12 pagineScan 16 Sep 2020tanushree sNessuna valutazione finora
- Model - Day Wise Session Plan FOR FTCPDocumento42 pagineModel - Day Wise Session Plan FOR FTCPJaveed AhamedNessuna valutazione finora
- Operations As A Competitive WeaponDocumento4 pagineOperations As A Competitive WeaponAsiburRahmanNessuna valutazione finora
- Medición de EnergíaDocumento11 pagineMedición de EnergíaLeo ReyesNessuna valutazione finora
- Chapter 4 7 QC ToolsDocumento22 pagineChapter 4 7 QC ToolsAussakorn SumranjaiNessuna valutazione finora
- Jsu T5 Bi K1Documento1 paginaJsu T5 Bi K1MOHD FAHMI BIN ABD ALIAN MoeNessuna valutazione finora
- BSIT22 2ndDocumento2 pagineBSIT22 2ndmuhammadertaza620Nessuna valutazione finora
- Pub BusDocumento1 paginaPub BusMohamed AliNessuna valutazione finora
- Modulus Based Compaction QC/QA Using LWD: University of Maryland, College ParkDocumento2 pagineModulus Based Compaction QC/QA Using LWD: University of Maryland, College ParkRogelioBecerraFuentesNessuna valutazione finora
- Syllabus SCCT1033 Intro Media TechDocumento8 pagineSyllabus SCCT1033 Intro Media TechHafizah SapuanNessuna valutazione finora
- Strategy in Business Context: People Motivation InteractionDocumento1 paginaStrategy in Business Context: People Motivation InteractionBaher WilliamNessuna valutazione finora
- TOS Grade 2 MAPEH Diagnostic Test 2022 FINALDocumento20 pagineTOS Grade 2 MAPEH Diagnostic Test 2022 FINALLeslie PadillaNessuna valutazione finora
- Safety Integrity Level (SIL)Documento1 paginaSafety Integrity Level (SIL)UKNessuna valutazione finora
- FGEI AdDocumento3 pagineFGEI Adjaved iqbalNessuna valutazione finora
- ICPprivilegesDocumento5 pagineICPprivilegesBUREAU VERITASNessuna valutazione finora
- 6-Training Need IdentificationDocumento5 pagine6-Training Need IdentificationBharat KasarNessuna valutazione finora
- MDR Flowchart Dec2017Documento1 paginaMDR Flowchart Dec2017kicklOp100% (2)
- Description: Tags: 08ombudDocumento1 paginaDescription: Tags: 08ombudanon-463337Nessuna valutazione finora
- P01181 2014P015 Structural Analysis of Photoresist at Boundary Area in Resist Pattern PDFDocumento1 paginaP01181 2014P015 Structural Analysis of Photoresist at Boundary Area in Resist Pattern PDFLauraNessuna valutazione finora
- Skill Matrix: Department: Sales - IaDocumento2 pagineSkill Matrix: Department: Sales - Iagowtham_venkat_4Nessuna valutazione finora
- Accupuncture Project BVP Final A3Documento1 paginaAccupuncture Project BVP Final A3Balu Venkatesa PerumalNessuna valutazione finora
- Effect of Wind Speed On Structural Behaviour of Monopole and Self-Support Telecommunication TowersDocumento18 pagineEffect of Wind Speed On Structural Behaviour of Monopole and Self-Support Telecommunication TowersnegisbabiNessuna valutazione finora
- Structural Analysis of Steel TowersDocumento11 pagineStructural Analysis of Steel TowersGunabalasingam JeneevanNessuna valutazione finora
- Computer Science 2020-2021 Program Sheet: Artificial Intelligence TrackDocumento2 pagineComputer Science 2020-2021 Program Sheet: Artificial Intelligence TracknegisbabiNessuna valutazione finora
- Transmission Tower Modeling By: George T. Watson PEDocumento11 pagineTransmission Tower Modeling By: George T. Watson PEGeorge MainaNessuna valutazione finora
- BOQ Office BuildingsDocumento24 pagineBOQ Office BuildingsRonnie Albert MonteroNessuna valutazione finora
- Division 16.telecommunication Tower Standards Section 17-311. Telecommunication Towers and Antennas: General ProvisionDocumento9 pagineDivision 16.telecommunication Tower Standards Section 17-311. Telecommunication Towers and Antennas: General ProvisionVirubinnya ViruNessuna valutazione finora
- International Lhoist Berghmans Master ScholarshipDocumento2 pagineInternational Lhoist Berghmans Master ScholarshipnegisbabiNessuna valutazione finora
- 01 General InformationDocumento6 pagine01 General InformationnegisbabiNessuna valutazione finora
- Unit1 PDFDocumento45 pagineUnit1 PDFMartin Sebastian Gomez GalizziNessuna valutazione finora
- A Comparative Criteria Method For TelecommunicatioDocumento9 pagineA Comparative Criteria Method For TelecommunicationegisbabiNessuna valutazione finora
- Growing Scallions (Green Onions) For Market GardenersDocumento3 pagineGrowing Scallions (Green Onions) For Market GardenersnegisbabiNessuna valutazione finora
- DE Tower Eurocode Partial FactorsDocumento2 pagineDE Tower Eurocode Partial FactorsnegisbabiNessuna valutazione finora
- How To Develop Money-Making Niche PDFDocumento43 pagineHow To Develop Money-Making Niche PDFnegisbabiNessuna valutazione finora
- Ten Steps To Linux SurvivalDocumento189 pagineTen Steps To Linux SurvivalNataly CastilloNessuna valutazione finora
- FU Money PDFDocumento240 pagineFU Money PDFManuel VértizNessuna valutazione finora
- Wind Load On The Antenna and AppurtenancesDocumento2 pagineWind Load On The Antenna and AppurtenancesnegisbabiNessuna valutazione finora
- Wonderful Ethiopians EbookDocumento174 pagineWonderful Ethiopians Ebookልጅ ኦሪ100% (1)
- Integrated Finite Elements Analysis and Design of StructuresDocumento50 pagineIntegrated Finite Elements Analysis and Design of Structuresaeiou321Nessuna valutazione finora
- Teaching Kids Whats The Weather Like Lesson PlanDocumento3 pagineTeaching Kids Whats The Weather Like Lesson PlannegisbabiNessuna valutazione finora
- Web Development and Beyond - 2017.03 PDFDocumento63 pagineWeb Development and Beyond - 2017.03 PDFnegisbabiNessuna valutazione finora
- ExerciseDocumento15 pagineExerciseNguyen NamNessuna valutazione finora
- Format Requirements For An Appendix (Or Appendices)Documento2 pagineFormat Requirements For An Appendix (Or Appendices)negisbabiNessuna valutazione finora
- A Comparative Criteria Method For TelecommunicatioDocumento9 pagineA Comparative Criteria Method For TelecommunicationegisbabiNessuna valutazione finora
- 04 Input and OutputDocumento10 pagine04 Input and OutputnegisbabiNessuna valutazione finora
- Sity MensurDocumento91 pagineSity MensurnegisbabiNessuna valutazione finora
- Toolkit13 Sec9 PDFDocumento36 pagineToolkit13 Sec9 PDFrohit1999Nessuna valutazione finora
- Sity MensurDocumento91 pagineSity MensurnegisbabiNessuna valutazione finora
- Adisu FentawDocumento138 pagineAdisu FentawnegisbabiNessuna valutazione finora
- 6 Methods of Data Collection PDFDocumento30 pagine6 Methods of Data Collection PDFKristine Agustin100% (4)
- Unconstrained Numerical Optimization An Introduction For EconometriciansDocumento32 pagineUnconstrained Numerical Optimization An Introduction For Econometriciansvaskore100% (1)
- Rstan ManualDocumento49 pagineRstan ManualAlvaro Limber Chirino GutierrezNessuna valutazione finora
- A Survey On The Dai-Liao Family of Nonlinear Conjugate Gradient MethodsDocumento16 pagineA Survey On The Dai-Liao Family of Nonlinear Conjugate Gradient Methodsهشام محمد خضرNessuna valutazione finora
- OptimDocumento70 pagineOptimNitin KumarNessuna valutazione finora
- CS-6777 Liu AbsDocumento103 pagineCS-6777 Liu AbsILLA PAVAN KUMAR (PA2013003013042)Nessuna valutazione finora
- A Limited T,: Memory Algorithm For Bound Constrained T, TDocumento19 pagineA Limited T,: Memory Algorithm For Bound Constrained T, TJahn SchrödingerNessuna valutazione finora
- Solution of The Nonlinear Finite Element Equations in Nonlinear FEMDocumento48 pagineSolution of The Nonlinear Finite Element Equations in Nonlinear FEMAkshay VenugopalNessuna valutazione finora
- Using MaxlikDocumento20 pagineUsing MaxlikJames HotnielNessuna valutazione finora
- Robustpf: A Command For Robust Estimation of Production FunctionsDocumento11 pagineRobustpf: A Command For Robust Estimation of Production FunctionsSlava YurkovNessuna valutazione finora
- DFT Hands On Nguyen PDFDocumento76 pagineDFT Hands On Nguyen PDFRicardo C100% (1)
- Parametric Design of Sailing Hull Shapes: Antonio MancusoDocumento13 pagineParametric Design of Sailing Hull Shapes: Antonio MancusolavrikNessuna valutazione finora
- Nonlinear Least Squares Theory - Lecture NotesDocumento33 pagineNonlinear Least Squares Theory - Lecture NotesAnonymous tsTtieMHDNessuna valutazione finora
- MlogitDocumento61 pagineMlogitraydonalNessuna valutazione finora
- Transportation Research Part C: Hend Manasra, Tomer Toledo TDocumento12 pagineTransportation Research Part C: Hend Manasra, Tomer Toledo TLAURA SANCHEZ RAMOSNessuna valutazione finora
- Least Squares Method For Factor AnalysisDocumento72 pagineLeast Squares Method For Factor AnalysisPrasanna KumarNessuna valutazione finora
- Radial Return Method Applied in Thick-Walled Cylinder AnalysisDocumento15 pagineRadial Return Method Applied in Thick-Walled Cylinder AnalysisAndré RodriguesNessuna valutazione finora
- Package Maxlik': R Topics DocumentedDocumento46 paginePackage Maxlik': R Topics DocumentedRicard Diago SambuagaNessuna valutazione finora
- MatStudio Castep - 2Documento63 pagineMatStudio Castep - 2Anish Kumar100% (1)
- R MaximizeDocumento7 pagineR MaximizeMariia SungatullinaNessuna valutazione finora
- Scipy RefDocumento722 pagineScipy RefJoseph SpartNessuna valutazione finora
- Ab Initio Geometry Optimization For Large Molecules: Frank Eckert, Peter Pulay, Hans-Joachim WernerDocumento11 pagineAb Initio Geometry Optimization For Large Molecules: Frank Eckert, Peter Pulay, Hans-Joachim WernerLata DeshmukhNessuna valutazione finora
- QUIZ-1 - Attempt ReviewDocumento4 pagineQUIZ-1 - Attempt ReviewRitik ChaudharyNessuna valutazione finora
- SAS The Neural ProcedureDocumento136 pagineSAS The Neural ProcedurelibredescargaNessuna valutazione finora
- A Review of Clinical Prediction ModelsDocumento36 pagineA Review of Clinical Prediction Modelssarafnexus4Nessuna valutazione finora
- ml5 0 PDFDocumento185 pagineml5 0 PDFDemitria Dini AriyaniNessuna valutazione finora
- Plugin-Mateusz Dziubinski PHD ThesisDocumento141 paginePlugin-Mateusz Dziubinski PHD Thesisnivedita_h42404Nessuna valutazione finora
- Implicit Simulations With Ls Dyna Introduction andDocumento36 pagineImplicit Simulations With Ls Dyna Introduction andVirginija BortkevičienėNessuna valutazione finora
- IMSL Fortran Library User Guide 2 PDFDocumento233 pagineIMSL Fortran Library User Guide 2 PDFAshoka VanjareNessuna valutazione finora
- Scipy ReferenceDocumento907 pagineScipy ReferenceabydounNessuna valutazione finora
- Mechanical Engineering Program COPPE / Federal University of Rio de Janeiro Caixa Postal 68503, 21945-970 Rio de Janeiro, BRAZILDocumento46 pagineMechanical Engineering Program COPPE / Federal University of Rio de Janeiro Caixa Postal 68503, 21945-970 Rio de Janeiro, BRAZILEdward Quijada OrellanaNessuna valutazione finora