Potrebbero piacerti anche
- Aula Automação EletropneumáticaDocumento121 pagineAula Automação EletropneumáticaRonaldo Majuste100% (1)
- Manual Inversor WegDocumento2 pagineManual Inversor WegRonaldo MajusteNessuna valutazione finora
- Circuitos EletricosDocumento92 pagineCircuitos EletricosRonaldo MajusteNessuna valutazione finora
- Aula MotoresDocumento52 pagineAula MotoresRonaldo MajusteNessuna valutazione finora
- Teoria 4 Sistema Trif - SicoDocumento14 pagineTeoria 4 Sistema Trif - SicoCaio FalconNessuna valutazione finora
- Estudo dos Motores ElétricosDocumento26 pagineEstudo dos Motores Elétricossajo1000Nessuna valutazione finora
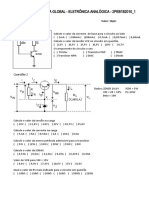
- Prova Global Eletronica 2peb1s2010 - 1SDocumento2 pagineProva Global Eletronica 2peb1s2010 - 1SRonaldo MajusteNessuna valutazione finora
- Apoatila Eletronica de PotenciaDocumento11 pagineApoatila Eletronica de PotenciaRonaldo MajusteNessuna valutazione finora
- Prova instalação elétrica motor induçãoDocumento2 pagineProva instalação elétrica motor induçãoRonaldo MajusteNessuna valutazione finora
- Aula 3 - Filosofia Da ProteçãoDocumento30 pagineAula 3 - Filosofia Da ProteçãoRonaldo Majuste100% (1)
- Tabela Do EletricistaDocumento4 pagineTabela Do EletricistaRonaldo MajusteNessuna valutazione finora
- Proteção de Motores Elétricos de Grande PorteDocumento10 pagineProteção de Motores Elétricos de Grande PorteRonaldo MajusteNessuna valutazione finora
- PROVA ELETRÔNICA SEM CONSULTADocumento2 paginePROVA ELETRÔNICA SEM CONSULTARonaldo MajusteNessuna valutazione finora
- ComandoDocumento43 pagineComandoRonaldo MajusteNessuna valutazione finora
- Aula 2 - Calculo de Corrente Nas BarrasDocumento11 pagineAula 2 - Calculo de Corrente Nas BarrasRonaldo MajusteNessuna valutazione finora
- Sistema elétrico de potência e subestaçõesDocumento31 pagineSistema elétrico de potência e subestaçõesRonaldo Majuste100% (1)
- 6062 1 PDFDocumento19 pagine6062 1 PDFRonaldo MajusteNessuna valutazione finora
- Lista de Exercicios Eletricidade - Capacitores e ResistoresDocumento17 pagineLista de Exercicios Eletricidade - Capacitores e ResistoresLeonardo SouzaNessuna valutazione finora
- 04 Cap 01Documento3 pagine04 Cap 01Fernanda PintoNessuna valutazione finora
- CFW 11 práticas inversor frequênciaDocumento10 pagineCFW 11 práticas inversor frequênciaRonaldo MajusteNessuna valutazione finora
- Teoria 7 Circuito de Disparo para Conversores Controlados Por FaseDocumento7 pagineTeoria 7 Circuito de Disparo para Conversores Controlados Por FaseFábio CoelhoNessuna valutazione finora
- Apostila de Laboratório de TransformadoresDocumento36 pagineApostila de Laboratório de TransformadoresRenan ScoccaNessuna valutazione finora
- Weg-CFW11 Manual SoftPLC 0899 5737 R03 PDocumento28 pagineWeg-CFW11 Manual SoftPLC 0899 5737 R03 PJailson Silva100% (1)
- Sistema supervisório de centrífuga de açúcarDocumento15 pagineSistema supervisório de centrífuga de açúcarRonaldo MajusteNessuna valutazione finora
- CFW-11 Ref Rápida ParâmetrosDocumento33 pagineCFW-11 Ref Rápida ParâmetrosPREVISTONessuna valutazione finora
- Inversores Weg - FirmwareDocumento60 pagineInversores Weg - FirmwareRonaldo MajusteNessuna valutazione finora
- M FpsoftDocumento69 pagineM FpsofttridentazulNessuna valutazione finora
- Vida Útil Mola PratoDocumento2 pagineVida Útil Mola PratoRonaldo MajusteNessuna valutazione finora
- Drives Af 600 FPDocumento24 pagineDrives Af 600 FPRonaldo MajusteNessuna valutazione finora
- Anexo 4 - Ficha de PresençaDocumento2 pagineAnexo 4 - Ficha de PresençaNailde MariaNessuna valutazione finora
- Projeto Político PedagógicoDocumento75 pagineProjeto Político PedagógicoJulianaOliveiraNessuna valutazione finora
- Atividade ProbabilidadeDocumento9 pagineAtividade ProbabilidadeGabriel FurtadoNessuna valutazione finora
- Matemática: Descritores para resolução de problemasDocumento24 pagineMatemática: Descritores para resolução de problemasPio X Carpina100% (1)
- Regulamento Moradia Estudantil PDFDocumento14 pagineRegulamento Moradia Estudantil PDFSamara KilluaNessuna valutazione finora
- Questões de Português FCCDocumento16 pagineQuestões de Português FCCboniNessuna valutazione finora
- SIG@UFRPEDocumento1 paginaSIG@UFRPEDaniel ArrudaNessuna valutazione finora
- STRAUSS, Anselm L. Espelhos e Máscaras. Capítulos 1-3Documento2 pagineSTRAUSS, Anselm L. Espelhos e Máscaras. Capítulos 1-3Martha Rhodes0% (1)
- AME Enfermagem PDFDocumento8 pagineAME Enfermagem PDFCarlos Alberto Costa0% (6)
- Colaborar - Aap1 - Fundamentos Da Gestão Educacional e Coordenação PedagógicaDocumento2 pagineColaborar - Aap1 - Fundamentos Da Gestão Educacional e Coordenação PedagógicaAndressa Borges NascimentoNessuna valutazione finora
- Serviço Social: profissão, área de conhecimento e formaçãoDocumento3 pagineServiço Social: profissão, área de conhecimento e formaçãoSara DantasNessuna valutazione finora
- Autonimia e Educação em Emmanuel Kant Paulo FreireDocumento73 pagineAutonimia e Educação em Emmanuel Kant Paulo FreireLey Gomes100% (1)
- Resenha Avaliativa - METODOLOGIA E PRÁTICA DE ENSINO DA ALFABETIZAÇÃO E LETRAMENTODocumento3 pagineResenha Avaliativa - METODOLOGIA E PRÁTICA DE ENSINO DA ALFABETIZAÇÃO E LETRAMENTOPaloma PiresNessuna valutazione finora
- Material Didático - Ciências NeurológicasDocumento57 pagineMaterial Didático - Ciências NeurológicasRudvan CicottiNessuna valutazione finora
- Tornei-Me Licenciado: e Agora? (Versão Promocional)Documento17 pagineTornei-Me Licenciado: e Agora? (Versão Promocional)Arnaldo Soba100% (1)
- PDF Editado PDFDocumento11 paginePDF Editado PDFAnonymous aPzoIa4Nessuna valutazione finora
- Quadros de Mérito e Excelência 2014/2015Documento19 pagineQuadros de Mérito e Excelência 2014/2015Agrupamento de Escolas de Alvalade, LisboaNessuna valutazione finora
- Acompanhamento de Competencias Ramo EscoteiroDocumento34 pagineAcompanhamento de Competencias Ramo EscoteiroAnna100% (1)
- Edital IFMGDocumento35 pagineEdital IFMGMagno TarantinoNessuna valutazione finora
- Manual do formador - Recursos para desenvolver sessões formativasDocumento227 pagineManual do formador - Recursos para desenvolver sessões formativaskleberNessuna valutazione finora
- Plano de Trabalho Docente IFCEDocumento8 paginePlano de Trabalho Docente IFCEEnio RomagnomeNessuna valutazione finora
- 2014 Anuário Conscienciologia 2014 Site PDFDocumento272 pagine2014 Anuário Conscienciologia 2014 Site PDFCida NicolauNessuna valutazione finora
- Estágio de Geografia no CEDIMDocumento3 pagineEstágio de Geografia no CEDIMVictor AcousticNessuna valutazione finora
- Multiplicar e dividir números por 10, 100, 1000, 0.1, 0.01 e 0.001Documento2 pagineMultiplicar e dividir números por 10, 100, 1000, 0.1, 0.01 e 0.001SammyyeahNessuna valutazione finora
- COMUM AREA - Jogos Matematicos - APSDocumento5 pagineCOMUM AREA - Jogos Matematicos - APSNegritudeNessuna valutazione finora
- Cuidados para Os Aficionados em GamesDocumento2 pagineCuidados para Os Aficionados em GamesAndreane Lima E SilvaNessuna valutazione finora
- Ensino superior: desafios didáticos e práticas reflexivasDocumento8 pagineEnsino superior: desafios didáticos e práticas reflexivassimplesMENTENessuna valutazione finora
- Escolha da variedade de espanholDocumento105 pagineEscolha da variedade de espanholDiego OmeroNessuna valutazione finora
- 2022 PV Reaplicacao PPL D1 CD1 PDFDocumento32 pagine2022 PV Reaplicacao PPL D1 CD1 PDFVitorNessuna valutazione finora
- Retificação Do Resultado Final Classificatório Homologação 1Documento36 pagineRetificação Do Resultado Final Classificatório Homologação 1Robson IastremskiNessuna valutazione finora