Potrebbero piacerti anche
- Atividade 5Documento3 pagineAtividade 5Victor SanttosNessuna valutazione finora
- Artigo CONEM 2012Documento10 pagineArtigo CONEM 2012Adenilson Cristiano BelizárioNessuna valutazione finora
- Segurança e Confiabilidade em Estruturas de Contenção Estudo de CasoDocumento24 pagineSegurança e Confiabilidade em Estruturas de Contenção Estudo de CasoMaurício AndradeNessuna valutazione finora
- 13561-Texto Do Artigo-209209220088-1-10-20190917Documento12 pagine13561-Texto Do Artigo-209209220088-1-10-20190917Heitor GamaNessuna valutazione finora
- Tarefa 4.2 - Gerenciamento de RiscosDocumento5 pagineTarefa 4.2 - Gerenciamento de RiscosRicardo InacioNessuna valutazione finora
- (2016) Avaliação Da Segurança de Um Pórtico Plano de Concreto Armado Utilizando o AnsysDocumento12 pagine(2016) Avaliação Da Segurança de Um Pórtico Plano de Concreto Armado Utilizando o AnsysJONATHAN JUSTINO APOS CASSIMIRONessuna valutazione finora
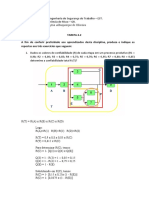
- Tarefa 4.2Documento3 pagineTarefa 4.2Marco MelloNessuna valutazione finora
- Viaduto Quarto Centenário CompletoDocumento10 pagineViaduto Quarto Centenário CompletoMayara MelloNessuna valutazione finora
- Introducao A NP EN 1990 PDFDocumento15 pagineIntroducao A NP EN 1990 PDFPaloma ValeNessuna valutazione finora
- Tarefa 4.2Documento4 pagineTarefa 4.2Felipe Dias100% (1)
- Dogma Fator de Segurança Aoki Sefe ViDocumento22 pagineDogma Fator de Segurança Aoki Sefe VidouglaszimbaNessuna valutazione finora
- COC796 Confiabilidade Estrutural Ano 2003Documento84 pagineCOC796 Confiabilidade Estrutural Ano 2003Lucas Gouveia100% (1)
- Manutenção Baseada No RiscoDocumento28 pagineManutenção Baseada No RiscoJoseNessuna valutazione finora
- 1 - Segurança e Confiabilidade (Nelson Aoki)Documento21 pagine1 - Segurança e Confiabilidade (Nelson Aoki)Arthur LeandroNessuna valutazione finora
- Manutenção FiabilidadeDocumento16 pagineManutenção FiabilidadeRafael Figueiras100% (1)
- Análise de confiabilidade estrutural via método SORM DG: análise de confiabilidade por meio de curvaturas principais de superfícies de estado limiteDa EverandAnálise de confiabilidade estrutural via método SORM DG: análise de confiabilidade por meio de curvaturas principais de superfícies de estado limiteNessuna valutazione finora
- TEORIA Da ConfiabilidadeDocumento7 pagineTEORIA Da Confiabilidadetania_diasNessuna valutazione finora
- Lista de Exercícios - 1Documento4 pagineLista de Exercícios - 1Yuri AlvesNessuna valutazione finora
- 9-Qualidade e Confiabilidade Da Rede de DistribuiçãoDocumento20 pagine9-Qualidade e Confiabilidade Da Rede de DistribuiçãoEduardo Domingos Peres duduNessuna valutazione finora
- Falhas em DisjuntoresDocumento14 pagineFalhas em DisjuntoresMarcelus Rocha100% (1)
- Definição Da Criticidade Dos Equipamentos Manutenção IndustrialDocumento5 pagineDefinição Da Criticidade Dos Equipamentos Manutenção IndustrialuamirandaNessuna valutazione finora
- Apostila Patologias PrediosDocumento27 pagineApostila Patologias PrediosJonathan MendesNessuna valutazione finora
- Exercícios Engenharia de Segurança Do TrabalhoDocumento4 pagineExercícios Engenharia de Segurança Do TrabalhoJuan Cypriano100% (1)
- Patologia 3Documento20 paginePatologia 3Fernanda SalgadoNessuna valutazione finora
- Atv2-Christianjorgerogaldeandrade IsidoropedrosokechenetoDocumento32 pagineAtv2-Christianjorgerogaldeandrade Isidoropedrosokechenetomatheusfiori17Nessuna valutazione finora
- Trabalho de TCC - RAM - Revc (14802)Documento32 pagineTrabalho de TCC - RAM - Revc (14802)Lucas SilveiraNessuna valutazione finora
- Pag 36-49Documento14 paginePag 36-49André GussonNessuna valutazione finora
- Template-Trabalho Patologia M1 FinalDocumento16 pagineTemplate-Trabalho Patologia M1 FinalTatiane MarquesNessuna valutazione finora
- Concreto Armado I - Aula Combinações PDFDocumento48 pagineConcreto Armado I - Aula Combinações PDFcgtorresrafael2620Nessuna valutazione finora
- Apostila - Analise de Falhas em Equipamentos 1Documento24 pagineApostila - Analise de Falhas em Equipamentos 1Marcelo CardosoNessuna valutazione finora
- Artigo (Bauer)Documento10 pagineArtigo (Bauer)Linaldo FilhoNessuna valutazione finora
- Análise Da Probabilidade de Falha de Uma Fundação Profunda Na Região Centro Oeste Do BrasilDocumento37 pagineAnálise Da Probabilidade de Falha de Uma Fundação Profunda Na Região Centro Oeste Do Brasilclaiton mesacasaNessuna valutazione finora
- ESTRUTURAS METALICAS - Ações e SegurançaDocumento17 pagineESTRUTURAS METALICAS - Ações e SegurançaRickcarlosNessuna valutazione finora
- Avaliação de RiscosDocumento42 pagineAvaliação de RiscosSilva CézarNessuna valutazione finora
- Confiabilidade de Componentes e SistemasDocumento42 pagineConfiabilidade de Componentes e SistemasNiltonJunior100% (1)
- CONFIABILIDADEDocumento5 pagineCONFIABILIDADERafael M. OliveiraNessuna valutazione finora
- Definicao Da Estrategia de Manutencao Com Base Na Criticidade Dos EquipamentosDocumento14 pagineDefinicao Da Estrategia de Manutencao Com Base Na Criticidade Dos EquipamentosJulio SantosNessuna valutazione finora
- AV2 - Processos ConstrutivosDocumento6 pagineAV2 - Processos ConstrutivosJairo MarquesNessuna valutazione finora
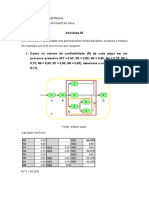
- Atividade 5Documento4 pagineAtividade 5Gustavo HornhardtNessuna valutazione finora
- Estabilidade Global 9Documento26 pagineEstabilidade Global 9Manoel AbrantesNessuna valutazione finora
- Gerência de Risco - Tarefa 4.2Documento4 pagineGerência de Risco - Tarefa 4.2Luiz NetoNessuna valutazione finora
- Análise de Falhas Mecânicas - Conceitos Básicos (Parte 3 de 3)Documento9 pagineAnálise de Falhas Mecânicas - Conceitos Básicos (Parte 3 de 3)Ericson BenicioNessuna valutazione finora
- Segur An Cae Strut UralDocumento25 pagineSegur An Cae Strut UralJosé Brites100% (1)
- Spda NBR 5419-2015 PDFDocumento32 pagineSpda NBR 5419-2015 PDFNeide Silva100% (1)
- ATV2-João Lucas - Matheus FioriDocumento24 pagineATV2-João Lucas - Matheus Fiorimatheusfiori17Nessuna valutazione finora
- Relatório Técnico Concreto Protedido ProntoDocumento35 pagineRelatório Técnico Concreto Protedido ProntoMayara MelloNessuna valutazione finora
- Nota IIIDocumento10 pagineNota IIIweston chambalNessuna valutazione finora
- Estruturas Metálicas - Fator de SegurançaDocumento9 pagineEstruturas Metálicas - Fator de SegurançaVinicius RenardNessuna valutazione finora
- Artigo FundaçõesDocumento15 pagineArtigo FundaçõesVH HenickaNessuna valutazione finora
- A Área de Exposição Equivalente Segundo A Parte 2 Da ABNT NBR 5419Documento3 pagineA Área de Exposição Equivalente Segundo A Parte 2 Da ABNT NBR 5419HENRIQUENessuna valutazione finora
- Identificação de PerigosDocumento8 pagineIdentificação de PerigosDaniel Oliveira de FariasNessuna valutazione finora
- Estudo Comparativo de Metodologias Aproximadas PDocumento9 pagineEstudo Comparativo de Metodologias Aproximadas PAndressa RairaNessuna valutazione finora
- 5 CriticidadeDocumento7 pagine5 CriticidadeMartinho Heldai Mavungo HeldaiNessuna valutazione finora
- Algoritmo Metaheurístico Construtivo Aplicado À Manutenção Programada Da GeraçãoDocumento8 pagineAlgoritmo Metaheurístico Construtivo Aplicado À Manutenção Programada Da GeraçãoMaycoln OliveiraNessuna valutazione finora
- Análise de Estabilidade Com Abordagem Probabilística em Taludes de Cavas de Mineração A Céu AbertoDocumento6 pagineAnálise de Estabilidade Com Abordagem Probabilística em Taludes de Cavas de Mineração A Céu AbertoRonald MacazanaNessuna valutazione finora
- Analise Risco API 581Documento14 pagineAnalise Risco API 581gamc10Nessuna valutazione finora
- Confiabilidade estrutural de pórticos metálicos planosDa EverandConfiabilidade estrutural de pórticos metálicos planosNessuna valutazione finora
- Fundamentos de Engenharia Econômica: viabilidade econômica de projetos de investimentoDa EverandFundamentos de Engenharia Econômica: viabilidade econômica de projetos de investimentoNessuna valutazione finora
- Acidentes em edificações devidos à ação do ventoDa EverandAcidentes em edificações devidos à ação do ventoNessuna valutazione finora
- Clara Descobre Os ImpressionistasDocumento12 pagineClara Descobre Os ImpressionistasrudsbrNessuna valutazione finora
- Vovó Tem Alzha... o QuêDocumento5 pagineVovó Tem Alzha... o QuêrudsbrNessuna valutazione finora
- Dicionario Termos TecnicosDocumento1 paginaDicionario Termos TecnicosrudsbrNessuna valutazione finora
- PLANTA 2 - CortesDocumento1 paginaPLANTA 2 - CortesrudsbrNessuna valutazione finora
- PLANTA 2 - Planta BaixaDocumento1 paginaPLANTA 2 - Planta BaixarudsbrNessuna valutazione finora
- ProtocoloAgendamento PDFDocumento1 paginaProtocoloAgendamento PDFrudsbrNessuna valutazione finora
- Apostila QG 109 1S2017 - Turmas F - GDocumento51 pagineApostila QG 109 1S2017 - Turmas F - GVinicius DiasNessuna valutazione finora
- Aula 03 Planejamento de ExperimentosDocumento25 pagineAula 03 Planejamento de Experimentoss valenteNessuna valutazione finora
- Aula 2 - Geraldo Goes e Alexandre Ywata - Introdução À Regressão LogísticaDocumento87 pagineAula 2 - Geraldo Goes e Alexandre Ywata - Introdução À Regressão LogísticaFranciso FreitasNessuna valutazione finora
- Met Comparativo RS Ex3Documento30 pagineMet Comparativo RS Ex3Marlon Muller100% (1)
- WD CAP 08 FolhetosDocumento10 pagineWD CAP 08 FolhetosJoão Pedro VicenteNessuna valutazione finora
- Apresentação Sobre Técnicas de Amostragem e Controle de QualidadeDocumento46 pagineApresentação Sobre Técnicas de Amostragem e Controle de QualidadePatrícia Costa de AndradeNessuna valutazione finora
- ApostilaDocumento162 pagineApostilaJoemar Mendes RegoNessuna valutazione finora
- Calculo III Integrais Triplas Exerc Resolvidos Parte I em 26 Set 2012Documento22 pagineCalculo III Integrais Triplas Exerc Resolvidos Parte I em 26 Set 2012Gustavo Henrique Alves DetomiNessuna valutazione finora
- 03 - Planejamento Do Tempo e Dos Recursos Do ProjetoDocumento126 pagine03 - Planejamento Do Tempo e Dos Recursos Do Projetodietrich_bonhoefferNessuna valutazione finora
- Aula 4 Correlação e RegressãoDocumento41 pagineAula 4 Correlação e RegressãoVinícius Gomes PedroniNessuna valutazione finora
- Apostila Estatistica PDFDocumento66 pagineApostila Estatistica PDFVagner CordeiroNessuna valutazione finora
- PRO3200 Lista de ExercíciosDocumento20 paginePRO3200 Lista de ExercíciosPedroNessuna valutazione finora
- Apostila - Geoestatítica Fundamentos e AplicaçõesDocumento139 pagineApostila - Geoestatítica Fundamentos e Aplicaçõesbenvindo_juniorNessuna valutazione finora
- Aula 3 - Intervalos de ConfiancaDocumento7 pagineAula 3 - Intervalos de ConfiancaNilto MassangoNessuna valutazione finora
- EA (Estatistica Aplicada) - CadernoDocumento101 pagineEA (Estatistica Aplicada) - CadernoMarcelo Barreira MirandaNessuna valutazione finora
- 85 - Intervalo de ConfiançaDocumento6 pagine85 - Intervalo de Confiançajunior freitas tavaresNessuna valutazione finora
- Prova Polícia Federal Resolvida 2021Documento7 pagineProva Polícia Federal Resolvida 2021Jonatan CostaNessuna valutazione finora
- Tópicos de Estatística - Estatística II - Versãoset2018 PDFDocumento135 pagineTópicos de Estatística - Estatística II - Versãoset2018 PDFmaria joao sargentoNessuna valutazione finora
- Propriedades Dos EstimadoresDocumento5 paginePropriedades Dos EstimadoresMarcelo SantosNessuna valutazione finora
- Aula 1 A 10Documento45 pagineAula 1 A 10Saulo Luiz100% (2)
- Probabilidade e Estatística - Slide - Ailton-Aula 19 - Regressão Linear - 2021.1-1Documento184 pagineProbabilidade e Estatística - Slide - Ailton-Aula 19 - Regressão Linear - 2021.1-1João Victor Oliveira RodriguesNessuna valutazione finora
- Aula 3 - Inferência - Intervalo de Confiança - Parte 1Documento61 pagineAula 3 - Inferência - Intervalo de Confiança - Parte 1Arthur FreitasNessuna valutazione finora
- Selecao GenomicaDocumento291 pagineSelecao GenomicaDiego HelciasNessuna valutazione finora
- Análise de Dados PDFDocumento173 pagineAnálise de Dados PDFAna Carla CastanheiraNessuna valutazione finora
- Cap 4Documento13 pagineCap 4vicenteneto93Nessuna valutazione finora
- Análise Paramétrica para Estimativa de Custos Na Construção de EdifíciosDocumento11 pagineAnálise Paramétrica para Estimativa de Custos Na Construção de EdifíciosVankrigger100% (1)
- Controlo Estatistico QualidadeDocumento52 pagineControlo Estatistico QualidadeAveiro PattyNessuna valutazione finora
- Treinamento Weibull++Documento59 pagineTreinamento Weibull++Marcio100% (1)
- Regressao Linear MultiplaDocumento75 pagineRegressao Linear MultiplaAlchemist7Nessuna valutazione finora