Potrebbero piacerti anche
- Mesh Generation: Advances and Applications in Computer Vision Mesh GenerationDa EverandMesh Generation: Advances and Applications in Computer Vision Mesh GenerationNessuna valutazione finora
- English 1st SemDocumento34 pagineEnglish 1st SemSRUJAN KALYANNessuna valutazione finora
- Evolutionary Algorithms for Mobile Ad Hoc NetworksDa EverandEvolutionary Algorithms for Mobile Ad Hoc NetworksNessuna valutazione finora
- 15CSL68 - Computer Graphics Lab Manual: Mr. Shankar RDocumento54 pagine15CSL68 - Computer Graphics Lab Manual: Mr. Shankar RCharizard FreakNessuna valutazione finora
- Image Based Modeling and Rendering: Exploring Visual Realism: Techniques in Computer VisionDa EverandImage Based Modeling and Rendering: Exploring Visual Realism: Techniques in Computer VisionNessuna valutazione finora
- CG Lab InfoDocumento16 pagineCG Lab InfoMohammed Adnan khanNessuna valutazione finora
- Analog and Hybrid Computing: The Commonwealth and International Library: Electrical Engineering DivisionDa EverandAnalog and Hybrid Computing: The Commonwealth and International Library: Electrical Engineering DivisionValutazione: 1 su 5 stelle1/5 (1)
- Cad 2 MarksDocumento13 pagineCad 2 MarksAnonymous JnvCyu85Nessuna valutazione finora
- Final Exam CADCAMFinal 2016FinalAnswersDocumento10 pagineFinal Exam CADCAMFinal 2016FinalAnswerskhalil alhatabNessuna valutazione finora
- Cad Cam - 22.12.15-1 PDFDocumento87 pagineCad Cam - 22.12.15-1 PDFGuru MaheshNessuna valutazione finora
- Advanced Computer Aided Design: M.T: Cad / Cam - IDocumento123 pagineAdvanced Computer Aided Design: M.T: Cad / Cam - IFAVAS T TNessuna valutazione finora
- Cad/Cam Lab: Government Engineering College Jagdalpur, BASTAR (C.G.) - 494005Documento17 pagineCad/Cam Lab: Government Engineering College Jagdalpur, BASTAR (C.G.) - 494005Gulshan SahuNessuna valutazione finora
- A Survey Paper On OpenGL ESDocumento4 pagineA Survey Paper On OpenGL ESEditor IJRITCCNessuna valutazione finora
- Ractal Image Compression Using Uadtree Decomposition and Huffman CodingDocumento6 pagineRactal Image Compression Using Uadtree Decomposition and Huffman CodingSylvain KamdemNessuna valutazione finora
- Self A CH 6 7Documento2 pagineSelf A CH 6 7Nomsa MwayengaNessuna valutazione finora
- Unit - I Two Marks Question and Answer: Me6501 Computer Aided DesignDocumento12 pagineUnit - I Two Marks Question and Answer: Me6501 Computer Aided DesignKamalakkannan RadhakrishnanNessuna valutazione finora
- 7CS7 CG&MT Lab Viva QuestionDocumento9 pagine7CS7 CG&MT Lab Viva QuestionAshish KumawatNessuna valutazione finora
- Graphic MidtermDocumento5 pagineGraphic MidtermKhaijin LimNessuna valutazione finora
- Cse Vi Computer Graphics and Visualization 10cs65 NotesDocumento97 pagineCse Vi Computer Graphics and Visualization 10cs65 NotesDiv Dutta100% (2)
- 3D Graphics OpenGLDocumento24 pagine3D Graphics OpenGLmigmorNessuna valutazione finora
- Visvesvaraya Technological University Belagavi: Computer Graphics Laboratory With Mini ProjectDocumento21 pagineVisvesvaraya Technological University Belagavi: Computer Graphics Laboratory With Mini ProjectPushpakar L SNessuna valutazione finora
- Computer Graphics - Important Question and AnswersDocumento9 pagineComputer Graphics - Important Question and AnswersR Anirudh ChelseaNessuna valutazione finora
- Computer Graphics Questions and AnswersDocumento8 pagineComputer Graphics Questions and AnswersAneeshia SasidharanNessuna valutazione finora
- CG ManualDocumento39 pagineCG Manualsanthosh reddyNessuna valutazione finora
- Computer Graphics Lecture 4Documento55 pagineComputer Graphics Lecture 4Crystal DzebuNessuna valutazione finora
- Computer Graphics (CGV) SIMP 2023Documento5 pagineComputer Graphics (CGV) SIMP 2023Hemamurthy 25Nessuna valutazione finora
- Graphics Notes 0405Documento5 pagineGraphics Notes 0405Richie BurdeosNessuna valutazione finora
- V. S. B Engineering College, Karur - 639 111: Department of Mechanical EngineeringDocumento121 pagineV. S. B Engineering College, Karur - 639 111: Department of Mechanical EngineeringvinodkumarNessuna valutazione finora
- ME6501-Computer Aided Design PDFDocumento8 pagineME6501-Computer Aided Design PDFVijay ShankarNessuna valutazione finora
- Cad Cam Mtexam 2Documento3 pagineCad Cam Mtexam 2khalil alhatabNessuna valutazione finora
- CG Lab Manual - 18 SchemeDocumento44 pagineCG Lab Manual - 18 Schemepraveen ps100% (2)
- Frequency Analysis Using Catia V5Documento41 pagineFrequency Analysis Using Catia V5Vasudha Ballarapu100% (1)
- Cadcam Assignments PartADocumento4 pagineCadcam Assignments PartAmkumar_234155Nessuna valutazione finora
- CG 15cs62 Model QP SolutionsDocumento60 pagineCG 15cs62 Model QP SolutionsYasha DhiguNessuna valutazione finora
- For Academic Use OnlyDocumento17 pagineFor Academic Use OnlyPrakhar SrivastavaNessuna valutazione finora
- Computer Graphics Quantum-1Documento246 pagineComputer Graphics Quantum-1youtenger tubeNessuna valutazione finora
- Short Answer QuestionsDocumento8 pagineShort Answer QuestionsRajyalakshmi MNessuna valutazione finora
- Computer Graphic ReportDocumento8 pagineComputer Graphic ReportAliNessuna valutazione finora
- M.C.A. Degree Examination, 2010: Register Number: Name of The CandidateDocumento2 pagineM.C.A. Degree Examination, 2010: Register Number: Name of The CandidateAbu AbdullahNessuna valutazione finora
- Main Report CGDocumento105 pagineMain Report CGAshish MorambeNessuna valutazione finora
- CG Lab PDFDocumento61 pagineCG Lab PDFanantha innanjeNessuna valutazione finora
- CS71 - Computer Graphics 2 MarksDocumento23 pagineCS71 - Computer Graphics 2 MarkspeyartheriyathuNessuna valutazione finora
- Overview of CadDocumento53 pagineOverview of CadAkash Srinivasa ReddyNessuna valutazione finora
- Overview of CAD IitDDocumento17 pagineOverview of CAD IitDDineshNewalkarNessuna valutazione finora
- CAD 2 Marks With AnswersDocumento12 pagineCAD 2 Marks With AnswersSARGUNA THAMIZHANNessuna valutazione finora
- Department of Mechanical Engineering Me6501Computer Aided Designquestion Bank Unit - I Part ADocumento2 pagineDepartment of Mechanical Engineering Me6501Computer Aided Designquestion Bank Unit - I Part AChennai RajaNessuna valutazione finora
- Adhiparasakthi College of Engineering G.B. Nagar, Kalavai - 632 506 Department of Computer Science & Engg Iv Year / Cse Cs2401 - Computer GraphicsDocumento13 pagineAdhiparasakthi College of Engineering G.B. Nagar, Kalavai - 632 506 Department of Computer Science & Engg Iv Year / Cse Cs2401 - Computer GraphicsBritto RajNessuna valutazione finora
- Module 1Documento45 pagineModule 1SohanNessuna valutazione finora
- Two Marks - Part - 1Documento14 pagineTwo Marks - Part - 1sathyaaaaa1Nessuna valutazione finora
- 15AE308J - Design Lab Manual New 2020Documento43 pagine15AE308J - Design Lab Manual New 2020rushan ahmedNessuna valutazione finora
- Origami-Paper Folding SimulationDocumento17 pagineOrigami-Paper Folding SimulationManjunath HiremathNessuna valutazione finora
- ServiceDocumento2 pagineServicePramod GowdaNessuna valutazione finora
- Me6501 Computer Aided Design 2 Marks With AnswersDocumento12 pagineMe6501 Computer Aided Design 2 Marks With AnswersTrigger DineshNessuna valutazione finora
- Computer Graphics (Book)Documento245 pagineComputer Graphics (Book)Birjesh RathourNessuna valutazione finora
- Unit 2Documento34 pagineUnit 2sai venkatsharmaNessuna valutazione finora
- A Realistic 2D Drawing System: Online Submission ID: 513Documento8 pagineA Realistic 2D Drawing System: Online Submission ID: 513Nadeem Khan100% (1)
- Three-Dimensional Computer Graphics Architecture: Tulika Mitra and Tzi-Cker ChiuehDocumento9 pagineThree-Dimensional Computer Graphics Architecture: Tulika Mitra and Tzi-Cker Chiuehpravin_bhavaleNessuna valutazione finora
- College of Computing and Information Sciences Final Assessment Spring 2020 SemesterDocumento27 pagineCollege of Computing and Information Sciences Final Assessment Spring 2020 Semestertalha khanNessuna valutazione finora
- Processing 15shadersDocumento41 pagineProcessing 15shadersWeliton De Bortoli100% (1)
- MODULE 3 True and FalseDocumento2 pagineMODULE 3 True and FalseKamarul NizamNessuna valutazione finora
- Assignment 3 TransitionDocumento4 pagineAssignment 3 TransitionKamarul NizamNessuna valutazione finora
- MODULE 2 Multiple ChoiceDocumento5 pagineMODULE 2 Multiple ChoiceKamarul NizamNessuna valutazione finora
- Organization of Production: Test IiiDocumento9 pagineOrganization of Production: Test IiiKamarul NizamNessuna valutazione finora
- Module 3: Human Resources and Job Design: Multiple ChoiceDocumento4 pagineModule 3: Human Resources and Job Design: Multiple ChoiceKamarul NizamNessuna valutazione finora
- Assignment 2 PyramidDocumento1 paginaAssignment 2 PyramidKamarul NizamNessuna valutazione finora
- Application For GRADUATE Membership of Engineers AustraliaDocumento4 pagineApplication For GRADUATE Membership of Engineers AustraliaKamarul NizamNessuna valutazione finora
- Weekly Partner Statement - 2018-W25Documento5 pagineWeekly Partner Statement - 2018-W25Kamarul NizamNessuna valutazione finora
- Porocity InclusionDocumento4 paginePorocity InclusionKamarul NizamNessuna valutazione finora
- Discussion Started by Group Replies Unread Last Post: Add A New TopicDocumento2 pagineDiscussion Started by Group Replies Unread Last Post: Add A New TopicKamarul NizamNessuna valutazione finora
- Rev Ques AnswerDocumento23 pagineRev Ques AnswerKamarul NizamNessuna valutazione finora
- Solutions For Questions/Problems of Chapter 5Documento11 pagineSolutions For Questions/Problems of Chapter 5Kamarul NizamNessuna valutazione finora
- Assignment No 4: University of Kuala Lumpur - Malaysia France InstituteDocumento3 pagineAssignment No 4: University of Kuala Lumpur - Malaysia France InstituteKamarul NizamNessuna valutazione finora
- Assignment 1 CylinderDocumento2 pagineAssignment 1 CylinderKamarul NizamNessuna valutazione finora
- Assembly ModellingDocumento32 pagineAssembly ModellingKamarul NizamNessuna valutazione finora
- Assignment 7 Marking Scheme For FFD 24502 - Plate and Sheet DVLP DWGDocumento2 pagineAssignment 7 Marking Scheme For FFD 24502 - Plate and Sheet DVLP DWGKamarul NizamNessuna valutazione finora
- Assignments Checklist and Marks January 2014Documento2 pagineAssignments Checklist and Marks January 2014Kamarul NizamNessuna valutazione finora
- Universiti Kuala Lumpur Malaysia France Institute: Metal Fabrication Technology DepartmentDocumento21 pagineUniversiti Kuala Lumpur Malaysia France Institute: Metal Fabrication Technology DepartmentKamarul NizamNessuna valutazione finora
- Sample Industry Internship ReportDocumento3 pagineSample Industry Internship ReportKamarul NizamNessuna valutazione finora
- Intro2cad Cam CaeDocumento29 pagineIntro2cad Cam CaeKamarul NizamNessuna valutazione finora
- Components Cad Cam CaeDocumento15 pagineComponents Cad Cam CaeKamarul Nizam100% (1)
- 1 - IntroductionDocumento10 pagine1 - IntroductionKamarul NizamNessuna valutazione finora
- Practical F2F Hours: Prof. Dr. Azanam Shah Hashim Deputy President (Academic & Technology)Documento7 paginePractical F2F Hours: Prof. Dr. Azanam Shah Hashim Deputy President (Academic & Technology)Kamarul NizamNessuna valutazione finora
- Session 1 - Smart Board Training PDFDocumento2 pagineSession 1 - Smart Board Training PDFKamarul NizamNessuna valutazione finora
- Memo Deadline For Submission of CourseworkDocumento4 pagineMemo Deadline For Submission of CourseworkKamarul NizamNessuna valutazione finora
- PricelistDocumento2 paginePricelistKamarul NizamNessuna valutazione finora
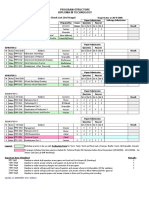
- Final Paper Submission Check List (3rd Stage) : Program Structure Diploma in TechnologyDocumento2 pagineFinal Paper Submission Check List (3rd Stage) : Program Structure Diploma in TechnologyKamarul NizamNessuna valutazione finora
- 4pipefitting Pressure Test 170129022549 PDFDocumento13 pagine4pipefitting Pressure Test 170129022549 PDFKamarul NizamNessuna valutazione finora
- Campus Internal Proposal Department / Section:: Human Capital Unit, Unikl MfiDocumento6 pagineCampus Internal Proposal Department / Section:: Human Capital Unit, Unikl MfiKamarul NizamNessuna valutazione finora
- Bloom's Taxonomy Indicator v3.32Documento47 pagineBloom's Taxonomy Indicator v3.32Kamarul NizamNessuna valutazione finora
- Qualys Data For RemediationDocumento10 pagineQualys Data For Remediationapriant fesNessuna valutazione finora
- Memory Management in Linux Operating SystemDocumento13 pagineMemory Management in Linux Operating SystemsnehaNessuna valutazione finora
- Performance Appraisal of Google EmployeesDocumento22 paginePerformance Appraisal of Google EmployeesbhagyaNessuna valutazione finora
- Expt No.:5 Verilog Program For 3 To 8 Decoder DateDocumento11 pagineExpt No.:5 Verilog Program For 3 To 8 Decoder DateSandhya RaghunathNessuna valutazione finora
- 20210913115458D3708 - Session 01 Introduction To Big Data AnalyticsDocumento28 pagine20210913115458D3708 - Session 01 Introduction To Big Data AnalyticsAnthony HarjantoNessuna valutazione finora
- CS3691 Important QuestionsDocumento10 pagineCS3691 Important QuestionssowmiyaNessuna valutazione finora
- Autonolas Tokenomics Core Technical DocumentDocumento38 pagineAutonolas Tokenomics Core Technical Documentxue ChelseaNessuna valutazione finora
- Ripspeed DV740 User GuideDocumento47 pagineRipspeed DV740 User GuideRadu Baciu-NiculescuNessuna valutazione finora
- Azur ManualDocumento12 pagineAzur ManualGaurav KumarNessuna valutazione finora
- ABC DEF: 123 Spruce ST, Apt 35 Philadelphia PA 19103 (555) 555-1212Documento1 paginaABC DEF: 123 Spruce ST, Apt 35 Philadelphia PA 19103 (555) 555-1212BLa blaNessuna valutazione finora
- 7 ALV ReportsDocumento24 pagine7 ALV ReportsKIRANNessuna valutazione finora
- 1 MQP FafdDocumento20 pagine1 MQP Fafdharshita patniNessuna valutazione finora
- Compiler ConstructionDocumento5 pagineCompiler ConstructionEman noorNessuna valutazione finora
- Solving Active Directory Replication FailureDocumento3 pagineSolving Active Directory Replication Failurekamakom78Nessuna valutazione finora
- Val IiDocumento13 pagineVal IiChilton FernandesNessuna valutazione finora
- Term Paper On Osi ModelDocumento5 pagineTerm Paper On Osi Modelfrqofvbnd100% (1)
- Cascading Style Sheets (CSS) : Mendel RosenblumDocumento20 pagineCascading Style Sheets (CSS) : Mendel RosenblumMazharNessuna valutazione finora
- Torpedo ManualDocumento30 pagineTorpedo ManualKent StateNessuna valutazione finora
- PDF Hacks: 100 Industrial-Strength Tips & ToolsDocumento4 paginePDF Hacks: 100 Industrial-Strength Tips & ToolsBen YungNessuna valutazione finora
- Modeling Business Processes Using BPMN and ARIS: Applies ToDocumento11 pagineModeling Business Processes Using BPMN and ARIS: Applies Totapera_mangeziNessuna valutazione finora
- BLOCKCHAI SyllabusDocumento27 pagineBLOCKCHAI SyllabusChennamadhavuni SahithiNessuna valutazione finora
- Oracle TimesTen In-Memory Database Java Developer's Guide, Release 18.1Documento124 pagineOracle TimesTen In-Memory Database Java Developer's Guide, Release 18.1errr33Nessuna valutazione finora
- GrandChaseKakao Information CompilationDocumento164 pagineGrandChaseKakao Information CompilationStskye WNessuna valutazione finora
- Live 4D Results - Magnum 4D, SportsToto, DaMaCai 1+3DDocumento1 paginaLive 4D Results - Magnum 4D, SportsToto, DaMaCai 1+3DVaratha RajuNessuna valutazione finora
- STM 8 Af 6266Documento99 pagineSTM 8 Af 6266bargunanNessuna valutazione finora
- FusionServer 2288H V6 Server Technical White Paper PDFDocumento302 pagineFusionServer 2288H V6 Server Technical White Paper PDFCarlos BastosNessuna valutazione finora
- Car Audio DEH-X5Documento2 pagineCar Audio DEH-X5Jairo Enciso OrdoñezNessuna valutazione finora
- Lecture02 Frameworks Platforms-Part1Documento40 pagineLecture02 Frameworks Platforms-Part1Tuna ÖztürkNessuna valutazione finora
- ZingHR The-New Age Employee Centric Digital HR2016 1Documento31 pagineZingHR The-New Age Employee Centric Digital HR2016 1misha guptaNessuna valutazione finora
- Paper 2 - Option A - Databases SL/HL Core: Annotated Student Work Paper 2: Example 1Documento9 paginePaper 2 - Option A - Databases SL/HL Core: Annotated Student Work Paper 2: Example 1anirudhNessuna valutazione finora
- Beginning AutoCAD® 2022 Exercise Workbook: For Windows®Da EverandBeginning AutoCAD® 2022 Exercise Workbook: For Windows®Nessuna valutazione finora
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchDa EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchValutazione: 4 su 5 stelle4/5 (10)
- Certified Solidworks Professional Advanced Surface Modeling Exam PreparationDa EverandCertified Solidworks Professional Advanced Surface Modeling Exam PreparationValutazione: 5 su 5 stelle5/5 (1)
- SketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyDa EverandSketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyValutazione: 1.5 su 5 stelle1.5/5 (2)
- A Comprehensive Guide to Video Game Design SchoolsDa EverandA Comprehensive Guide to Video Game Design SchoolsNessuna valutazione finora
- Autodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Da EverandAutodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Valutazione: 5 su 5 stelle5/5 (2)
- From Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsDa EverandFrom Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsNessuna valutazione finora
- Autodesk Fusion 360 Black Book (V 2.0.12670) - Part 1Da EverandAutodesk Fusion 360 Black Book (V 2.0.12670) - Part 1Nessuna valutazione finora
- AutoCAD 2010 Tutorial Series: Drawing Dimensions, Elevations and SectionsDa EverandAutoCAD 2010 Tutorial Series: Drawing Dimensions, Elevations and SectionsNessuna valutazione finora
- Autodesk Fusion 360 Black Book (V 2.0.10027) - Part 2Da EverandAutodesk Fusion 360 Black Book (V 2.0.10027) - Part 2Nessuna valutazione finora
- FreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsDa EverandFreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsValutazione: 5 su 5 stelle5/5 (1)