Potrebbero piacerti anche
- Multiple Choice Question (MCQ) of Alternator and Synchronous Motors PageDocumento29 pagineMultiple Choice Question (MCQ) of Alternator and Synchronous Motors Pagekibrom atsbha0% (1)
- Microprocessor 2 Marks V+Documento24 pagineMicroprocessor 2 Marks V+mekalajesiNessuna valutazione finora
- Microprocessor FundamentalsDocumento32 pagineMicroprocessor FundamentalsChandreyee MukherjeeNessuna valutazione finora
- Micro Question and Explaination ModuleDocumento30 pagineMicro Question and Explaination ModuleGemmalyn GanganNessuna valutazione finora
- CS 1304-MICROPROCESSORS 1. What Is Microprocessor? Give The Power SupplyDocumento34 pagineCS 1304-MICROPROCESSORS 1. What Is Microprocessor? Give The Power Supplychituuu100% (2)
- Micro Processor QBDocumento36 pagineMicro Processor QBNarayanan VenkatNessuna valutazione finora
- Microprocessor And Microcontroller Document AnalysisDocumento35 pagineMicroprocessor And Microcontroller Document AnalysisPRABHVaB100% (1)
- Loyola Icam College of Engineering and Technology Department of Ece Cs 2252 Microprocessors and Microcontrollers Question Bank With AnswersDocumento38 pagineLoyola Icam College of Engineering and Technology Department of Ece Cs 2252 Microprocessors and Microcontrollers Question Bank With AnswersKarthik KarthiksNessuna valutazione finora
- BE-II/IV-Sem-IV Computer Organization Lab Viva Questions With Answers-Osmania UniversityDocumento15 pagineBE-II/IV-Sem-IV Computer Organization Lab Viva Questions With Answers-Osmania UniversitySirisha VamsiNessuna valutazione finora
- Twomarks 141206002903 Conversion Gate02Documento27 pagineTwomarks 141206002903 Conversion Gate02roshan2468Nessuna valutazione finora
- Two Mark MicroprocessorDocumento18 pagineTwo Mark MicroprocessorGopinathan MNessuna valutazione finora
- Microprocessor 2marksDocumento14 pagineMicroprocessor 2marksManikandan PalaniNessuna valutazione finora
- Two Mark Questions-MpDocumento16 pagineTwo Mark Questions-Mps.reegan0% (1)
- Microprocessor and Microcontroller Interview QuestionsDocumento25 pagineMicroprocessor and Microcontroller Interview QuestionsDony George Paul67% (15)
- Model Test Paper 2Documento10 pagineModel Test Paper 2sasiNessuna valutazione finora
- MPMC 2marks (Unit 1 To 5) (Q & A)Documento32 pagineMPMC 2marks (Unit 1 To 5) (Q & A)Ganapathy Ramadoss100% (2)
- MPMCDocumento20 pagineMPMCAnonymous 3XeTp7drNessuna valutazione finora
- Question Bank For MPDocumento38 pagineQuestion Bank For MPmekalajesiNessuna valutazione finora
- 2 Marks MPDocumento15 pagine2 Marks MPGopinathan MNessuna valutazione finora
- MP MC 2 Mark QB VasiyullahDocumento36 pagineMP MC 2 Mark QB VasiyullahppNessuna valutazione finora
- Svcet: Sri Vidya College of Engineering & Technology Course Material (Question Bank)Documento4 pagineSvcet: Sri Vidya College of Engineering & Technology Course Material (Question Bank)Balaprakash VadivelNessuna valutazione finora
- CS2252 SQDocumento26 pagineCS2252 SQS. GobikaNessuna valutazione finora
- EE2354 MC 2marks 2013 PDFDocumento19 pagineEE2354 MC 2marks 2013 PDFAmy MaggiNessuna valutazione finora
- Microprocessor and Its ApplicationsDocumento24 pagineMicroprocessor and Its Applicationssuperkan619Nessuna valutazione finora
- Microprocessor and Microcontroller Instruction SetDocumento13 pagineMicroprocessor and Microcontroller Instruction SetsenthilkumarNessuna valutazione finora
- Microprocessor and Its ApplicationsDocumento25 pagineMicroprocessor and Its ApplicationsAbhishek SinghNessuna valutazione finora
- EE2354 Question Bank BESTDocumento18 pagineEE2354 Question Bank BESTGokul ChandrasekaranNessuna valutazione finora
- 8085 and 8086 Microprocessor NotesDocumento18 pagine8085 and 8086 Microprocessor NotesmurugappanNessuna valutazione finora
- Imp MP QuesDocumento24 pagineImp MP QuesbhatiaharryjassiNessuna valutazione finora
- Iii Ece MPMC QBDocumento10 pagineIii Ece MPMC QBvigneshcsNessuna valutazione finora
- EE6502 MPMC Two Marks With AnswerDocumento10 pagineEE6502 MPMC Two Marks With Answervlsimani9110100% (1)
- Question With Answer MP & MCDocumento13 pagineQuestion With Answer MP & MCMATHANKUMAR.SNessuna valutazione finora
- Microprosser 8085Documento15 pagineMicroprosser 8085saigdv1978Nessuna valutazione finora
- Ee6502 Microprocessors and Microcontrollers 2 Mark Question and Answers BY Ensolt ElakkiaDocumento38 pagineEe6502 Microprocessors and Microcontrollers 2 Mark Question and Answers BY Ensolt ElakkiaBalaprakash VadivelNessuna valutazione finora
- 8-bit Microprocessor FundamentalsDocumento42 pagine8-bit Microprocessor FundamentalsShubham Benjamin JohnNessuna valutazione finora
- Cs 2252-Microprocessors 2 NewDocumento27 pagineCs 2252-Microprocessors 2 NewVaishnavi RaveNessuna valutazione finora
- Poriyaan 1Mg989dhFlDgmwOGWS7D3zl9OaKbdbz IDocumento43 paginePoriyaan 1Mg989dhFlDgmwOGWS7D3zl9OaKbdbz IS. GobikaNessuna valutazione finora
- EC6504 MICROPROCESSOR AND MICROCONTROLLER PART ADocumento15 pagineEC6504 MICROPROCESSOR AND MICROCONTROLLER PART AGuru BalanNessuna valutazione finora
- Microprocessor and Microcontroller ProgrammingDocumento39 pagineMicroprocessor and Microcontroller ProgrammingGunasekaranNessuna valutazione finora
- Question Bank-Microprocessor and ApplicaionDocumento38 pagineQuestion Bank-Microprocessor and Applicaionchandrasekar100% (5)
- 8085 Is Pronounced AsDocumento9 pagine8085 Is Pronounced AsArbaaz khan786Nessuna valutazione finora
- MP Two Marks Jansi1Documento34 pagineMP Two Marks Jansi1SAHEEM SAJILANessuna valutazione finora
- Microprocessor Slides-2: 8085 MPUDocumento38 pagineMicroprocessor Slides-2: 8085 MPURavi TejaNessuna valutazione finora
- 3-Ee8551-Microprocessors and MicrocontrollersDocumento109 pagine3-Ee8551-Microprocessors and MicrocontrollersKeerthana SahadevanNessuna valutazione finora
- 2-Ee8551-Microprocessors and MicrocontrollersDocumento1 pagina2-Ee8551-Microprocessors and MicrocontrollersKeerthana SahadevanNessuna valutazione finora
- 8085 Microprocessor Architecture OverviewDocumento12 pagine8085 Microprocessor Architecture OverviewMandeep SinghNessuna valutazione finora
- Mupi 2 MarksDocumento11 pagineMupi 2 Marksveeyesyes08Nessuna valutazione finora
- MPDocumento39 pagineMPkural_civilNessuna valutazione finora
- Viva Questions and Answers in MP Lab - 1Documento6 pagineViva Questions and Answers in MP Lab - 1Sai KrishnaNessuna valutazione finora
- For GP 3Documento19 pagineFor GP 3Abhijeet ranjanNessuna valutazione finora
- The Latest Technical Questions For Various Companies From The Link BelowDocumento10 pagineThe Latest Technical Questions For Various Companies From The Link BelowSuman ChakrabortyNessuna valutazione finora
- Unit 1Documento78 pagineUnit 1Vasunthara DNessuna valutazione finora
- MIC 04 - Case Study One 8085 MPUDocumento40 pagineMIC 04 - Case Study One 8085 MPUomar hanyNessuna valutazione finora
- EE6502 DecDocumento90 pagineEE6502 Decsonu sabooNessuna valutazione finora
- Embedded Question BankDocumento15 pagineEmbedded Question BankPrakash MoorthyNessuna valutazione finora
- Embedded System and IoTDocumento9 pagineEmbedded System and IoTNitysNessuna valutazione finora
- Microprocessor and Interfacing: Authors:Ramesh.S.Gaonkar Badri Ram Douglas.V.Hall Liu and GibsonDocumento52 pagineMicroprocessor and Interfacing: Authors:Ramesh.S.Gaonkar Badri Ram Douglas.V.Hall Liu and Gibsonavireddy1Nessuna valutazione finora
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Da EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Nessuna valutazione finora
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationDa EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNessuna valutazione finora
- Sir C R Reddy College of Engineering, Eluru: Department of Training & PlacementsDocumento2 pagineSir C R Reddy College of Engineering, Eluru: Department of Training & PlacementsARUN GOVIND MEDABALIMINessuna valutazione finora
- Resume: Name Contact No Email IdDocumento2 pagineResume: Name Contact No Email IdARUN GOVIND MEDABALIMINessuna valutazione finora
- Sir C R Reddy College of Engineering, Eluru: Department of Training & PlacementsDocumento1 paginaSir C R Reddy College of Engineering, Eluru: Department of Training & PlacementsARUN GOVIND MEDABALIMINessuna valutazione finora
- Sir C R Reddy College of Engineering, Eluru: Department of Training & PlacementsDocumento1 paginaSir C R Reddy College of Engineering, Eluru: Department of Training & PlacementsARUN GOVIND MEDABALIMINessuna valutazione finora
- 9080 gLcK8BTDocumento15 pagine9080 gLcK8BTARUN GOVIND MEDABALIMINessuna valutazione finora
- RRM ResumeDocumento3 pagineRRM ResumeARUN GOVIND MEDABALIMINessuna valutazione finora
- Virus Programming in CMDDocumento12 pagineVirus Programming in CMDARUN GOVIND MEDABALIMI100% (1)
- Tessolve Semiconductor Placement Papers and PatternsDocumento1 paginaTessolve Semiconductor Placement Papers and PatternsARUN GOVIND MEDABALIMI0% (1)
- 2 Ass PSP 2019-20Documento4 pagine2 Ass PSP 2019-20ARUN GOVIND MEDABALIMINessuna valutazione finora
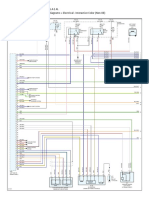
- CKT DiagramDocumento1 paginaCKT DiagramARUN GOVIND MEDABALIMINessuna valutazione finora
- Operation and Control of A Hybrid Photovoltaic-Diesel-Fuel Cell System Connected To Micro-GridDocumento7 pagineOperation and Control of A Hybrid Photovoltaic-Diesel-Fuel Cell System Connected To Micro-GridARUN GOVIND MEDABALIMINessuna valutazione finora
- InternetofThings IOTDefinitionCharacteristicsArchitectureEnablingTechnologiesApplicationFutureChallengesDocumento11 pagineInternetofThings IOTDefinitionCharacteristicsArchitectureEnablingTechnologiesApplicationFutureChallengesAdlan SyazwanNessuna valutazione finora
- The Hacker Crack DownDocumento323 pagineThe Hacker Crack DownIsrael Barac Hernández VenturaNessuna valutazione finora
- RRM ResumeDocumento3 pagineRRM ResumeARUN GOVIND MEDABALIMINessuna valutazione finora
- Title Automatic Dusk To Dawn Light ContrDocumento14 pagineTitle Automatic Dusk To Dawn Light ContrVictor OdoyoNessuna valutazione finora
- Naive Bayes ClassifierDocumento7 pagineNaive Bayes ClassifierARUN GOVIND MEDABALIMINessuna valutazione finora
- Smart Streetlight Using IR Sensors: Sindhu.A.M, Jerin George, Sumit Roy, Chandra JDocumento6 pagineSmart Streetlight Using IR Sensors: Sindhu.A.M, Jerin George, Sumit Roy, Chandra JSuhana SharmaNessuna valutazione finora
- Result AP Postal Circle GDS Post PDFDocumento103 pagineResult AP Postal Circle GDS Post PDFThappetla SrinivasNessuna valutazione finora
- Automatic Streetlights That Glow On Detecting Night and Object Using ArduinoDocumento15 pagineAutomatic Streetlights That Glow On Detecting Night and Object Using Arduinojunaid hussainNessuna valutazione finora
- Smart Streetlight Using IR Sensors: Sindhu.A.M, Jerin George, Sumit Roy, Chandra JDocumento6 pagineSmart Streetlight Using IR Sensors: Sindhu.A.M, Jerin George, Sumit Roy, Chandra JSuhana SharmaNessuna valutazione finora
- Smart street lighting control systemDocumento5 pagineSmart street lighting control systemARUN GOVIND MEDABALIMINessuna valutazione finora
- Operation and Control of A Hybrid Photovoltaic-Diesel-Fuel Cell System Connected To Micro-GridDocumento7 pagineOperation and Control of A Hybrid Photovoltaic-Diesel-Fuel Cell System Connected To Micro-GridARUN GOVIND MEDABALIMINessuna valutazione finora
- Automatic Streetlights That Glow On Detecting Night and Object Using ArduinoDocumento15 pagineAutomatic Streetlights That Glow On Detecting Night and Object Using Arduinojunaid hussainNessuna valutazione finora
- Sensors 18 03178 PDFDocumento14 pagineSensors 18 03178 PDFARUN GOVIND MEDABALIMINessuna valutazione finora
- Alert Messages To The Power Circuit For PDFDocumento59 pagineAlert Messages To The Power Circuit For PDFARUN GOVIND MEDABALIMINessuna valutazione finora
- PROJECT PRESENTATION ON Review at 2 b2Documento10 paginePROJECT PRESENTATION ON Review at 2 b2ARUN GOVIND MEDABALIMINessuna valutazione finora
- Notice CollegeDocumento4 pagineNotice CollegeARUN GOVIND MEDABALIMINessuna valutazione finora
- Solar Peltier RefrigeratorDocumento3 pagineSolar Peltier RefrigeratorARUN GOVIND MEDABALIMINessuna valutazione finora
- Simulink Model of Harmonic CompensationDocumento2 pagineSimulink Model of Harmonic CompensationARUN GOVIND MEDABALIMINessuna valutazione finora
- Solar Refrigerator Using Peltier Module: Page - 1Documento41 pagineSolar Refrigerator Using Peltier Module: Page - 1ARUN GOVIND MEDABALIMINessuna valutazione finora
- Learning HotMetal Pro 6 - 132Documento332 pagineLearning HotMetal Pro 6 - 132Viên Tâm LangNessuna valutazione finora
- Gary Mole and Glacial Energy FraudDocumento18 pagineGary Mole and Glacial Energy Fraudskyy22990% (1)
- ADSLADSLADSLDocumento83 pagineADSLADSLADSLKrishnan Unni GNessuna valutazione finora
- Micromaster 430: 7.5 KW - 250 KWDocumento118 pagineMicromaster 430: 7.5 KW - 250 KWAyman ElotaifyNessuna valutazione finora
- Computers As Components 2nd Edi - Wayne WolfDocumento815 pagineComputers As Components 2nd Edi - Wayne WolfShubham RajNessuna valutazione finora
- RTL8316C GR RealtekDocumento93 pagineRTL8316C GR RealtekMaugrys CastilloNessuna valutazione finora
- Case Study - Soren ChemicalDocumento3 pagineCase Study - Soren ChemicalSallySakhvadzeNessuna valutazione finora
- Enerflex 381338Documento2 pagineEnerflex 381338midoel.ziatyNessuna valutazione finora
- LPM 52 Compar Ref GuideDocumento54 pagineLPM 52 Compar Ref GuideJimmy GilcesNessuna valutazione finora
- CAP Regulation 20-1 - 05/29/2000Documento47 pagineCAP Regulation 20-1 - 05/29/2000CAP History LibraryNessuna valutazione finora
- Sop EcuDocumento11 pagineSop Ecuahmed saeedNessuna valutazione finora
- Civil Aeronautics BoardDocumento2 pagineCivil Aeronautics BoardJayson AlvaNessuna valutazione finora
- How To Make Money in The Stock MarketDocumento40 pagineHow To Make Money in The Stock Markettcb66050% (2)
- Module 5Documento10 pagineModule 5kero keropiNessuna valutazione finora
- 3.4 Spending, Saving and Borrowing: Igcse /O Level EconomicsDocumento9 pagine3.4 Spending, Saving and Borrowing: Igcse /O Level EconomicsRingle JobNessuna valutazione finora
- ECON Value of The FirmDocumento4 pagineECON Value of The FirmDomsNessuna valutazione finora
- ASCE - Art Competition RulesDocumento3 pagineASCE - Art Competition Rulesswarup babalsureNessuna valutazione finora
- Khadi Natural Company ProfileDocumento18 pagineKhadi Natural Company ProfileKleiton FontesNessuna valutazione finora
- Engine Controls (Powertrain Management) - ALLDATA RepairDocumento4 pagineEngine Controls (Powertrain Management) - ALLDATA Repairmemo velascoNessuna valutazione finora
- 01-Azeotropic Distillation (IL Chien)Documento35 pagine01-Azeotropic Distillation (IL Chien)Shivam Vinoth100% (1)
- 2020-05-14 County Times NewspaperDocumento32 pagine2020-05-14 County Times NewspaperSouthern Maryland OnlineNessuna valutazione finora
- Insulators and Circuit BreakersDocumento29 pagineInsulators and Circuit Breakersdilja aravindanNessuna valutazione finora
- Yi-Lai Berhad - COMPANY PROFILE - ProjectDocumento4 pagineYi-Lai Berhad - COMPANY PROFILE - ProjectTerry ChongNessuna valutazione finora
- Royalty-Free License AgreementDocumento4 pagineRoyalty-Free License AgreementListia TriasNessuna valutazione finora
- Ayushman BharatDocumento20 pagineAyushman BharatPRAGATI RAINessuna valutazione finora
- Make a Battery Level Indicator using LM339 ICDocumento13 pagineMake a Battery Level Indicator using LM339 ICnelson100% (1)
- Product Manual 36693 (Revision D, 5/2015) : PG Base AssembliesDocumento10 pagineProduct Manual 36693 (Revision D, 5/2015) : PG Base AssemblieslmarcheboutNessuna valutazione finora
- Top Brand Story Bar Supervisor Jobs Chennai Apply Now Latest Fresher Experienced Bar Supervisor Jobs in Various Location July 18 2021Documento1 paginaTop Brand Story Bar Supervisor Jobs Chennai Apply Now Latest Fresher Experienced Bar Supervisor Jobs in Various Location July 18 2021Surya JamesNessuna valutazione finora
- The SAGE Handbook of Digital JournalismDocumento497 pagineThe SAGE Handbook of Digital JournalismK JNessuna valutazione finora