Potrebbero piacerti anche
- Thomson Electrac HD Linear Actuator Motion Control per CAN BusDa EverandThomson Electrac HD Linear Actuator Motion Control per CAN BusNessuna valutazione finora
- Computer Control SystemDocumento67 pagineComputer Control SystemToua YajNessuna valutazione finora
- D.C. Powered Timing Light Model 161.2158 for 12 Volt Ignition Systems Sears Owners ManualDa EverandD.C. Powered Timing Light Model 161.2158 for 12 Volt Ignition Systems Sears Owners ManualNessuna valutazione finora
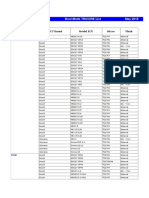
- Engine Data ListDocumento48 pagineEngine Data ListPham Tuan AnhNessuna valutazione finora
- Ecm HyundaiDocumento17 pagineEcm HyundaiJose Fco. Aleman ArriagaNessuna valutazione finora
- M800 OEM WRX78 Installation DocumentDocumento10 pagineM800 OEM WRX78 Installation DocumentRaheel FaroukNessuna valutazione finora
- Control System Control System Schematic BtraDocumento52 pagineControl System Control System Schematic BtraRoe De HardtoknowNessuna valutazione finora
- Camshaft Sensor 2.4 MitsubishiDocumento14 pagineCamshaft Sensor 2.4 MitsubishiJoselorenzo Torres ANessuna valutazione finora
- Glossary of Sae and ToyotaDocumento3 pagineGlossary of Sae and Toyotamike chenNessuna valutazione finora
- DTC P0130 Oxygen Sensor Circuit Malfunction (Bank 1 Sensor 1)Documento4 pagineDTC P0130 Oxygen Sensor Circuit Malfunction (Bank 1 Sensor 1)williamNessuna valutazione finora
- Система управления двигателемDocumento3 pagineСистема управления двигателемEdik Bonifacio MamaniNessuna valutazione finora
- Fiat Uno 1.4 Engine 160A1.046 Data SheetDocumento3 pagineFiat Uno 1.4 Engine 160A1.046 Data SheetMario100% (1)
- Grand Am Continental Tire Sports Integrating ECU PDFDocumento31 pagineGrand Am Continental Tire Sports Integrating ECU PDFsenthilvlNessuna valutazione finora
- PDFDocumento17 paginePDFGermautos VolkswagenNessuna valutazione finora
- Glossary of Sae and Toyota TermsDocumento3 pagineGlossary of Sae and Toyota TermsKevin StrongNessuna valutazione finora
- 1996 Toyota Corolla Owners Manual PDFDocumento195 pagine1996 Toyota Corolla Owners Manual PDFhanzhio elNessuna valutazione finora
- Toyota Mil CodeDocumento3 pagineToyota Mil CodeinayyerNessuna valutazione finora
- Pectel C2 ECU: ECU Offload Tool SoftwareDocumento7 paginePectel C2 ECU: ECU Offload Tool SoftwareJorge Arilio Gonzalez ArangoNessuna valutazione finora
- Ta1248 PDFDocumento38 pagineTa1248 PDFbad_boyz1989Nessuna valutazione finora
- 1mz Ecu Wiring DiagramDocumento7 pagine1mz Ecu Wiring Diagram12volt bayNessuna valutazione finora
- Passo 2010-2015 PDFDocumento32 paginePasso 2010-2015 PDFWaqar KhattakNessuna valutazione finora
- Toyota Altezza Ecu Side Terminal (TP5-7Base) Refer The Following For Special Setting When Modifying The Wiring, EtcDocumento9 pagineToyota Altezza Ecu Side Terminal (TP5-7Base) Refer The Following For Special Setting When Modifying The Wiring, EtcAlifNessuna valutazione finora
- Nissan 1991-1993 Silvia S13 SR20DET, 1991-1995 180SX SR20DETDocumento2 pagineNissan 1991-1993 Silvia S13 SR20DET, 1991-1995 180SX SR20DETElectronica Ave FenixNessuna valutazione finora
- Exhaust Gas Recirculation (Egr) System (4A FE)Documento6 pagineExhaust Gas Recirculation (Egr) System (4A FE)Hongda Zhuo100% (1)
- Eypad Verview: K636 - User's Quick Reference GuideDocumento2 pagineEypad Verview: K636 - User's Quick Reference Guidesyaf rudyNessuna valutazione finora
- Tablaobdii PidDocumento14 pagineTablaobdii PidMiguel Ibáñez GalindoNessuna valutazione finora
- Z18XE SCHDocumento3 pagineZ18XE SCHJan WolnyNessuna valutazione finora
- Diagrama Cluster Toyota 2007Documento1 paginaDiagrama Cluster Toyota 2007edwar goteraNessuna valutazione finora
- 2006fileaveo MTDocumento63 pagine2006fileaveo MTeurospeed2100% (1)
- cx5 MitsubichiDocumento554 paginecx5 MitsubichiJULIAN VALDERRAMA50% (2)
- Sequential Fuel Injection SystemDocumento66 pagineSequential Fuel Injection SystemCậu TúNessuna valutazione finora
- TVIP Ecu CommunicationDocumento2 pagineTVIP Ecu CommunicationPhang Kumwing100% (1)
- Engine Data ListDocumento48 pagineEngine Data ListYordano PerezNessuna valutazione finora
- Yaris 1ar - Fe - Engine - Control PDFDocumento36 pagineYaris 1ar - Fe - Engine - Control PDFCristhian CamposNessuna valutazione finora
- Nissan Primera ContentsDocumento1 paginaNissan Primera Contentsionbolo100% (1)
- Toyota Problem CodesDocumento1 paginaToyota Problem CodesFluke Ranza100% (2)
- Toyota Celica GT4 ST165 ECU Pin Out and Wiring DiagramDocumento3 pagineToyota Celica GT4 ST165 ECU Pin Out and Wiring DiagramSirleh SalehNessuna valutazione finora
- Adaptronic Blacktop Installation NotesDocumento6 pagineAdaptronic Blacktop Installation NotesRayz GsrNessuna valutazione finora
- BSD104DV H3axDocumento21 pagineBSD104DV H3axTiborNessuna valutazione finora
- Fgtech Boot Mode Tricore ListDocumento6 pagineFgtech Boot Mode Tricore ListMilena Perez100% (1)
- Pin Out Nissan Sensor MAFDocumento3 paginePin Out Nissan Sensor MAFAlbertiniCongoraAsto100% (1)
- 4EFTE 4EFE Engine Diagnotsic CodeDocumento6 pagine4EFTE 4EFE Engine Diagnotsic Codedimitris honiasNessuna valutazione finora
- MIL ON DTC P2820 2014 - 2017 Corolla Transmission(s) CVT 2017 Im Transmission(s) CVTDocumento10 pagineMIL ON DTC P2820 2014 - 2017 Corolla Transmission(s) CVT 2017 Im Transmission(s) CVTSajjad HussainNessuna valutazione finora
- Daihatsu Fault Codes DTCDocumento1 paginaDaihatsu Fault Codes DTCمحمد عبد الفتاح محمدNessuna valutazione finora
- PDFDocumento5 paginePDFJohn Mark CorralesNessuna valutazione finora
- 1ZZ-FE - 2ZZ-FE wiring (คันเร่งสาย)Documento84 pagine1ZZ-FE - 2ZZ-FE wiring (คันเร่งสาย)Mos stckrNessuna valutazione finora
- Instrument Panel Analog - Nissan Sentra 1993Documento8 pagineInstrument Panel Analog - Nissan Sentra 1993Alessandro BaffaNessuna valutazione finora
- Ignition System: General SafetyDocumento8 pagineIgnition System: General SafetyJesus ParraNessuna valutazione finora
- Mitsubishi FTODocumento14 pagineMitsubishi FTOJhonatan JalluranaNessuna valutazione finora
- Toyota Obd CodesDocumento4 pagineToyota Obd CodesAlexander MartinezNessuna valutazione finora
- Toyota 2AZ-FSEDocumento4 pagineToyota 2AZ-FSEТимNessuna valutazione finora
- Korando Ewd CewdDocumento192 pagineKorando Ewd CewdsatthatNessuna valutazione finora
- ACRONIMOSDocumento4 pagineACRONIMOScarlos_garcia_491Nessuna valutazione finora
- Panasonic WP1400 PDFDocumento69 paginePanasonic WP1400 PDFboroda2410Nessuna valutazione finora
- Data List/Active Test: DiagnosticsDocumento1 paginaData List/Active Test: DiagnosticsClodoaldo BiassioNessuna valutazione finora
- 321 Aim Pectel T6 100 EngDocumento5 pagine321 Aim Pectel T6 100 EngmisdeismoNessuna valutazione finora
- Biante SKYACTIV: Dimension & Weight Seating & TrimDocumento4 pagineBiante SKYACTIV: Dimension & Weight Seating & Trimyusransyah100% (1)
- Bosch 5.2.1 Engine Management SystemDocumento34 pagineBosch 5.2.1 Engine Management Systemolyga mgolNessuna valutazione finora
- Tier3 ElectricDocumento10 pagineTier3 ElectricLuong Nguyen Danh100% (1)
- Siemens MS43 SystemsDocumento26 pagineSiemens MS43 SystemszefrenchNessuna valutazione finora
- 07.5-09 TORKER Nozzle InstallationDocumento12 pagine07.5-09 TORKER Nozzle InstallationwyofreerideNessuna valutazione finora
- ASE 2010 L2 Composite VehicleDocumento20 pagineASE 2010 L2 Composite VehicleSeven See67% (3)
- 24 Volt ManualDocumento13 pagine24 Volt ManualCirilo JuniorNessuna valutazione finora
- GDI 3.5 6G74 ManualDocumento263 pagineGDI 3.5 6G74 ManualOlga Plohotnichenko83% (36)
- Audi SSPDocumento26 pagineAudi SSPAndrei Brka100% (1)
- Autonomous CarDocumento41 pagineAutonomous CarZia AzamNessuna valutazione finora
- 01Air-Elect Feb2015 PDFDocumento27 pagine01Air-Elect Feb2015 PDFjuan100% (1)
- Aut610 User's ManualDocumento45 pagineAut610 User's ManualJuan ContrerasNessuna valutazione finora
- ZF 4 HP 18 FlaDocumento22 pagineZF 4 HP 18 FlaJuan ContrerasNessuna valutazione finora
- Prevost Electrical SystemsDocumento23 paginePrevost Electrical SystemsJuan ContrerasNessuna valutazione finora
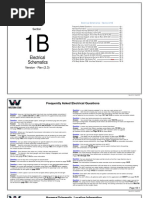
- 01B-ElectSchematics Feb2015 PDFDocumento19 pagine01B-ElectSchematics Feb2015 PDFjuanNessuna valutazione finora
- t-030f Spanish p35-48Documento4 paginet-030f Spanish p35-48Juan ContrerasNessuna valutazione finora
- Familia 15 47 PDFDocumento44 pagineFamilia 15 47 PDFJuan ContrerasNessuna valutazione finora
- 4G1x Service ManualsDocumento99 pagine4G1x Service ManualsSaifuddin Dayah90% (10)
- Group 9 Self-Diagnostic System: Outline 1Documento3 pagineGroup 9 Self-Diagnostic System: Outline 1giapy0000Nessuna valutazione finora
- Aut610 User's ManualDocumento31 pagineAut610 User's ManualjuanNessuna valutazione finora
- Bobina Gauss PDFDocumento22 pagineBobina Gauss PDFfronjose100% (1)
- USB - Link Quick Start Card 4 - 0 VersionDocumento2 pagineUSB - Link Quick Start Card 4 - 0 Versionricho2510Nessuna valutazione finora
- Fuel Actuator PDFDocumento2 pagineFuel Actuator PDFJuan ContrerasNessuna valutazione finora
- Heui Catalog PDFDocumento6 pagineHeui Catalog PDFLuisYFer1Nessuna valutazione finora
- Rebuilding The 6.6L Duramax Diesel PDFDocumento13 pagineRebuilding The 6.6L Duramax Diesel PDFJuan Contreras100% (3)
- Ut81a b C接口软件操作说明Documento20 pagineUt81a b C接口软件操作说明Juan ContrerasNessuna valutazione finora
- SerialDocumento1 paginaSerialJuan ContrerasNessuna valutazione finora
- Pinouts ICRDocumento38 paginePinouts ICRAdal Vera100% (1)
- NGD 0605 S enDocumento154 pagineNGD 0605 S enJuan José Rodriguez100% (15)
- System Wiring Diagrams A/C Circuit: CDR@WP - PLDocumento27 pagineSystem Wiring Diagrams A/C Circuit: CDR@WP - PLadcoryNessuna valutazione finora
- Guia Electronic ADocumento7 pagineGuia Electronic AJuan ContrerasNessuna valutazione finora
- Caterpillar EMCPDocumento40 pagineCaterpillar EMCPrealwild93% (59)
- 4a-Fe EngineDocumento13 pagine4a-Fe Engineanto_jo100% (5)
- Manual Select Switch Mode Untuk Penanganan Diagnosis Trouble Code Pada Sistem Injeksi Sepeda Motor SuzukiDocumento8 pagineManual Select Switch Mode Untuk Penanganan Diagnosis Trouble Code Pada Sistem Injeksi Sepeda Motor SuzukiIda HalidaNessuna valutazione finora
- Dti Installation: Applied BoltingDocumento2 pagineDti Installation: Applied BoltingAli KhalafNessuna valutazione finora
- 02 KksDocumento8 pagine02 KksManuel Jesus Perez MelgarNessuna valutazione finora
- CAT - 950G - SchematicDocumento2 pagineCAT - 950G - Schematicssinokrot95% (20)
- Motorcycle PDFDocumento442 pagineMotorcycle PDFFrancis ThomasNessuna valutazione finora
- Letter Code NEMA PDFDocumento1 paginaLetter Code NEMA PDFdabs_orangejuiceNessuna valutazione finora
- M.s.cygnus Z125Documento278 pagineM.s.cygnus Z125Luz Adriana Sanchez VillanuevaNessuna valutazione finora
- D11R Power Train PDFDocumento38 pagineD11R Power Train PDFChakroune100% (2)
- Volvo ServiceDocumento4 pagineVolvo ServicealiNessuna valutazione finora
- Pressure Regulator Isolator Valve Kit: GM 6T31/35/41/46/51 (Gen. 3 6T40)Documento1 paginaPressure Regulator Isolator Valve Kit: GM 6T31/35/41/46/51 (Gen. 3 6T40)Panceta O TerroristaNessuna valutazione finora
- 4 Faults Found GolfDocumento7 pagine4 Faults Found GolfTony ZuñigaNessuna valutazione finora
- MECHANICS SyllabusDocumento2 pagineMECHANICS SyllabusRaNessuna valutazione finora
- Generator VibrationDocumento4 pagineGenerator VibrationsatyandaruNessuna valutazione finora
- Production Engineering Assignment Groups Mechanical Engineering Uqf 8 ACADEMIC YEAR 2019/2020Documento3 pagineProduction Engineering Assignment Groups Mechanical Engineering Uqf 8 ACADEMIC YEAR 2019/2020steveNessuna valutazione finora
- PERKÿNS SABRE 6TG2AM AYRDIMCI MOTORDocumento2 paginePERKÿNS SABRE 6TG2AM AYRDIMCI MOTORRiki Akbar100% (1)
- Commercial Vehicle Business Unit: Product Spare Parts CatalogueDocumento106 pagineCommercial Vehicle Business Unit: Product Spare Parts CatalogueGemunu Weerethunga100% (2)
- 6BTA5.9-G3: Description FeaturesDocumento2 pagine6BTA5.9-G3: Description FeaturesHugo MartinezNessuna valutazione finora
- York Water Cooled Pacakged YBW SeriesDocumento5 pagineYork Water Cooled Pacakged YBW Seriespalitha1902100% (1)
- WD400U Service ManualDocumento180 pagineWD400U Service ManualJorjNessuna valutazione finora
- cfm567b Training Manual Component Identification PDFDocumento120 paginecfm567b Training Manual Component Identification PDFyura100% (2)
- Seal Kit Instruction Sheet: Subject: InstructionsDocumento1 paginaSeal Kit Instruction Sheet: Subject: InstructionsMarco GonzalezNessuna valutazione finora
- Field Component Manual: 1.7 T - G G P Gen2 Machine With Reflective EncoderDocumento15 pagineField Component Manual: 1.7 T - G G P Gen2 Machine With Reflective EncoderЕкатерина АндрееваNessuna valutazione finora
- Compressor, Main Parts, Types and Working Principle: PV NRT P TDocumento6 pagineCompressor, Main Parts, Types and Working Principle: PV NRT P TMuhammad Arslan AfzalNessuna valutazione finora
- DLR1508P 1509PDocumento1 paginaDLR1508P 1509PJulian Quevedo OrjuelaNessuna valutazione finora
- TraneDocumento1 paginaTraneAnonymous xFV7bg7QNessuna valutazione finora
- Table (4b) Actuator Dimensions (OM-2 To OM-3, OM-4 To OM-6) Table (4a) Actuator Dimensions (OM-1)Documento5 pagineTable (4b) Actuator Dimensions (OM-2 To OM-3, OM-4 To OM-6) Table (4a) Actuator Dimensions (OM-1)NaveenRajNessuna valutazione finora
- Features: TC-MS 2112 TDocumento2 pagineFeatures: TC-MS 2112 TAlain Alcázar GarcíaNessuna valutazione finora
- Bearing Arrangements PDFDocumento3 pagineBearing Arrangements PDFsaqlain aNessuna valutazione finora
- Minebea Stepper Motor Winding Wiring PinoutsDocumento3 pagineMinebea Stepper Motor Winding Wiring PinoutsBabobrillNessuna valutazione finora
- Pressure or Vacuum Switch: Series 96201, 96211, 96221Documento2 paginePressure or Vacuum Switch: Series 96201, 96211, 96221wag008Nessuna valutazione finora
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionDa EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionValutazione: 4.5 su 5 stelle4.5/5 (3)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestDa EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestValutazione: 4 su 5 stelle4/5 (28)
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerDa EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerValutazione: 4.5 su 5 stelle4.5/5 (54)
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisDa EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisValutazione: 4 su 5 stelle4/5 (2)
- ANSYS Workbench 2023 R2: A Tutorial Approach, 6th EditionDa EverandANSYS Workbench 2023 R2: A Tutorial Approach, 6th EditionNessuna valutazione finora
- Allison Transmissions: How to Rebuild & Modify: How to Rebuild & ModifyDa EverandAllison Transmissions: How to Rebuild & Modify: How to Rebuild & ModifyValutazione: 5 su 5 stelle5/5 (1)
- Chasing the Demon: A Secret History of the Quest for the Sound Barrier, and the Band of American Aces Who Conquered ItDa EverandChasing the Demon: A Secret History of the Quest for the Sound Barrier, and the Band of American Aces Who Conquered ItValutazione: 4 su 5 stelle4/5 (25)
- How to Fabricate Automotive Fiberglass & Carbon Fiber PartsDa EverandHow to Fabricate Automotive Fiberglass & Carbon Fiber PartsValutazione: 5 su 5 stelle5/5 (4)
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsDa EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsValutazione: 3.5 su 5 stelle3.5/5 (3)
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedDa EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedValutazione: 5 su 5 stelle5/5 (1)
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseDa EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseValutazione: 4.5 su 5 stelle4.5/5 (51)
- The Laws of Thermodynamics: A Very Short IntroductionDa EverandThe Laws of Thermodynamics: A Very Short IntroductionValutazione: 4.5 su 5 stelle4.5/5 (10)
- CDL Study Guide 2024-2025: Everything You Need to Know to Pass the Commercial Driver’s License Exam on your First Attempt, with the Most Complete and Up-to-Date Practice Tests - New VersionDa EverandCDL Study Guide 2024-2025: Everything You Need to Know to Pass the Commercial Driver’s License Exam on your First Attempt, with the Most Complete and Up-to-Date Practice Tests - New VersionValutazione: 5 su 5 stelle5/5 (2)
- Modern Engine Blueprinting Techniques: A Practical Guide to Precision Engine BlueprintingDa EverandModern Engine Blueprinting Techniques: A Practical Guide to Precision Engine BlueprintingValutazione: 4.5 su 5 stelle4.5/5 (9)
- Pilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CDa EverandPilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CNessuna valutazione finora
- Small Engines and Outdoor Power Equipment: A Care & Repair Guide for: Lawn Mowers, Snowblowers & Small Gas-Powered ImplementsDa EverandSmall Engines and Outdoor Power Equipment: A Care & Repair Guide for: Lawn Mowers, Snowblowers & Small Gas-Powered ImplementsNessuna valutazione finora
- Automotive Electronic Diagnostics (Course 1)Da EverandAutomotive Electronic Diagnostics (Course 1)Valutazione: 5 su 5 stelle5/5 (6)
- Data Acquisition from HD Vehicles Using J1939 CAN BusDa EverandData Acquisition from HD Vehicles Using J1939 CAN BusNessuna valutazione finora
- Powder Coating: A How-to Guide for Automotive, Motorcycle, and Bicycle PartsDa EverandPowder Coating: A How-to Guide for Automotive, Motorcycle, and Bicycle PartsValutazione: 4.5 su 5 stelle4.5/5 (17)