Potrebbero piacerti anche
- Bombas Eléctricas de Carburante Tipos de Construcción Averías Causas 52493Documento52 pagineBombas Eléctricas de Carburante Tipos de Construcción Averías Causas 52493AMILCAR MENDOZANessuna valutazione finora
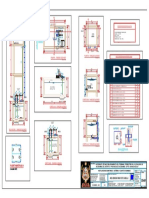
- CB - 01 - Cisterna - Cuarto Bombas 1 (A2)Documento1 paginaCB - 01 - Cisterna - Cuarto Bombas 1 (A2)Brayan Kel Alejo HinojozaNessuna valutazione finora
- Cirugia Refractiva Atlas PDFDocumento231 pagineCirugia Refractiva Atlas PDFstarsk777Nessuna valutazione finora
- Prefabricados de Concreto 2 PDFDocumento109 paginePrefabricados de Concreto 2 PDFkatire mendozaNessuna valutazione finora
- Greimas, A. J. Fontanille, J. - Semiotica de Las Pasiones. de Los Estados de Cosas A Los Estados de AnimoDocumento277 pagineGreimas, A. J. Fontanille, J. - Semiotica de Las Pasiones. de Los Estados de Cosas A Los Estados de Animojuliafou67% (3)
- Procesamiento Digital de Señales. Jose Pablo Alvarado MoyaDocumento247 pagineProcesamiento Digital de Señales. Jose Pablo Alvarado MoyaJorge BuenoNessuna valutazione finora
- Modelo de Matriz de ConsistenciaDocumento2 pagineModelo de Matriz de ConsistenciaRoberto MendozaNessuna valutazione finora
- Taller AA3 N Estudion Den CasoDocumento19 pagineTaller AA3 N Estudion Den CasoWilliam HuertasNessuna valutazione finora
- Algoritmos estudiante taller funcionesDocumento2 pagineAlgoritmos estudiante taller funcionesbriggyd rojasNessuna valutazione finora
- Guía de Actividades y Rúbrica de Evaluación - Unidad 3 - Etapa 4 - Algoritmos Con FuncionesDocumento5 pagineGuía de Actividades y Rúbrica de Evaluación - Unidad 3 - Etapa 4 - Algoritmos Con Funcionesewis02Nessuna valutazione finora
- Algoritmos estudiante taller funcionesDocumento2 pagineAlgoritmos estudiante taller funcionesbriggyd rojasNessuna valutazione finora
- Etapa 4 Taller Estudiante 1Documento3 pagineEtapa 4 Taller Estudiante 1ewis02Nessuna valutazione finora
- Presentacion 2Documento8 paginePresentacion 2DPT. BIOMEDICONessuna valutazione finora
- Paso 5 - Ewis RomeroDocumento15 paginePaso 5 - Ewis Romeroewis02Nessuna valutazione finora
- Control AnalógicoDocumento14 pagineControl Analógicoewis02Nessuna valutazione finora
- Paso 1 - Ewis RomeroDocumento8 paginePaso 1 - Ewis Romeroewis02Nessuna valutazione finora
- Como Programar PLC Allen BradleyDocumento1 paginaComo Programar PLC Allen Bradleyewis02Nessuna valutazione finora
- Conclusiones de Las ActividadesDocumento23 pagineConclusiones de Las Actividadesewis02Nessuna valutazione finora
- Paso 5 - Ewis RomeroDocumento15 paginePaso 5 - Ewis Romeroewis02Nessuna valutazione finora
- Examen de ProbabilidadDocumento139 pagineExamen de Probabilidadewis02Nessuna valutazione finora
- Fase 0 - Ewis RomeroDocumento6 pagineFase 0 - Ewis Romeroewis02Nessuna valutazione finora
- Fase 1 - Ewis RomeroDocumento17 pagineFase 1 - Ewis Romeroewis02Nessuna valutazione finora
- Etapa 1Documento3 pagineEtapa 1ewis02Nessuna valutazione finora
- El Otoño Es La Estación Que Cae Entre El Verano y El InviernoDocumento2 pagineEl Otoño Es La Estación Que Cae Entre El Verano y El Inviernoewis02Nessuna valutazione finora
- Conclusiones de Las ActividadesDocumento2 pagineConclusiones de Las Actividadesewis02Nessuna valutazione finora
- Actividad Inicial - Ewis RomeroDocumento2 pagineActividad Inicial - Ewis Romeroewis02Nessuna valutazione finora
- Unidad 3 - Paso 4 - Ewis RomeroDocumento13 pagineUnidad 3 - Paso 4 - Ewis Romeroewis02Nessuna valutazione finora
- Guia de Actividades y Rubrica de Evaluacion - Ciclo de La Tarea 2. Explicar Métodos de Conversión y Los Registros de Un Procesador 8086Documento16 pagineGuia de Actividades y Rubrica de Evaluacion - Ciclo de La Tarea 2. Explicar Métodos de Conversión y Los Registros de Un Procesador 8086Elaa TrujilloNessuna valutazione finora
- Ejercicio Numero de FotonesDocumento2 pagineEjercicio Numero de FotonesLizbeth DionicioNessuna valutazione finora
- Activity 3 Writing Task - Guía y RúbricaDocumento12 pagineActivity 3 Writing Task - Guía y RúbricaAlexander Guaitero MojicaNessuna valutazione finora
- Aporte Fase 2Documento6 pagineAporte Fase 2ewis02Nessuna valutazione finora
- Etapa 1. Organización y RecursosDocumento5 pagineEtapa 1. Organización y Recursosewis02Nessuna valutazione finora
- La Radiación de Cuerpo NegroDocumento1 paginaLa Radiación de Cuerpo Negroewis02Nessuna valutazione finora
- Ewis Romero Grupo 24Documento7 pagineEwis Romero Grupo 24ewis02Nessuna valutazione finora
- Activity 3Documento2 pagineActivity 3ewis02Nessuna valutazione finora
- Reconocimiento Ewis RomeroDocumento14 pagineReconocimiento Ewis Romeroewis02Nessuna valutazione finora
- 2 Diseño de Cimentación de Un Espectacular Por El Método de Meyerhof 2.0Documento15 pagine2 Diseño de Cimentación de Un Espectacular Por El Método de Meyerhof 2.0MARY07abrNessuna valutazione finora
- Sistemas de Traslación 13Documento52 pagineSistemas de Traslación 13Daniel CardosoNessuna valutazione finora
- Clase 3 - Vers 1Documento15 pagineClase 3 - Vers 1Alejandra GonzalezNessuna valutazione finora
- Zip ComponentesDocumento3 pagineZip ComponentesosvaldoNessuna valutazione finora
- Act Semana 4 y Taller Procedimiento FoliaciónDocumento8 pagineAct Semana 4 y Taller Procedimiento FoliaciónYuli Reyes MNessuna valutazione finora
- EVIDENCIA 1 Ok.Documento10 pagineEVIDENCIA 1 Ok.John JairoNessuna valutazione finora
- Estándar 606. Redes de Computadoras.Documento7 pagineEstándar 606. Redes de Computadoras.ElvinSotoNessuna valutazione finora
- Cambio de IdóneoDocumento9 pagineCambio de IdóneoYUSEFNessuna valutazione finora
- Resumen Capítulo 3 SO Silberschatz-GalvinDocumento5 pagineResumen Capítulo 3 SO Silberschatz-GalvinMichael JosepheNessuna valutazione finora
- La Perspectivas de Los RasgosDocumento15 pagineLa Perspectivas de Los RasgosYasmina Itzel Murillo LopezNessuna valutazione finora
- Fenómenos físicos de los rayos y pararrayosDocumento5 pagineFenómenos físicos de los rayos y pararrayosJosé PerezNessuna valutazione finora
- Metodo Simplex Caso MaximizacionDocumento41 pagineMetodo Simplex Caso MaximizacionJamer Gutierrez LazoNessuna valutazione finora
- Cv-Jhonny Alvarez TovarDocumento1 paginaCv-Jhonny Alvarez TovarJhonny Alvarez TovarNessuna valutazione finora
- Trabajo de MotoresDocumento17 pagineTrabajo de Motoresalex brunoNessuna valutazione finora
- Trazabilidad DMDocumento10 pagineTrazabilidad DMLeidy LagosNessuna valutazione finora
- El último JuegoDocumento465 pagineEl último JuegoRogelio RamírezNessuna valutazione finora
- Tesis Maestría ChambiDocumento79 pagineTesis Maestría ChambiJohnny AtencioNessuna valutazione finora
- Tablero: Tbe (Existente)Documento1 paginaTablero: Tbe (Existente)ELECTROMECANICA Y CIVIL S.A.Nessuna valutazione finora
- Taller 2 Sobre Internet PDFDocumento4 pagineTaller 2 Sobre Internet PDFsanandres99Nessuna valutazione finora
- X Coach Tropic ZDocumento2 pagineX Coach Tropic ZRobertoNessuna valutazione finora
- ConclusionesDocumento3 pagineConclusionescleiberNessuna valutazione finora
- Medir resistencia bobina relé automóvilDocumento1 paginaMedir resistencia bobina relé automóvilLuisVillafuerteNessuna valutazione finora
- Solicitud Permiso Camiones Combustible Rev.00F 30.12.13Documento41 pagineSolicitud Permiso Camiones Combustible Rev.00F 30.12.13Mario Garcia EscarateNessuna valutazione finora